The Role of Symmetry and Separation in Surface Evolution and Curve Shortening
With few exceptions, known explicit solutions of the curve shortening flow (CSE) of a plane curve, can be constructed by classical Lie point symmetry reductions or by functional separation of variables. One of the functionally separated solutions is …
Authors: Philip Broadbridge, Peter Vassiliou
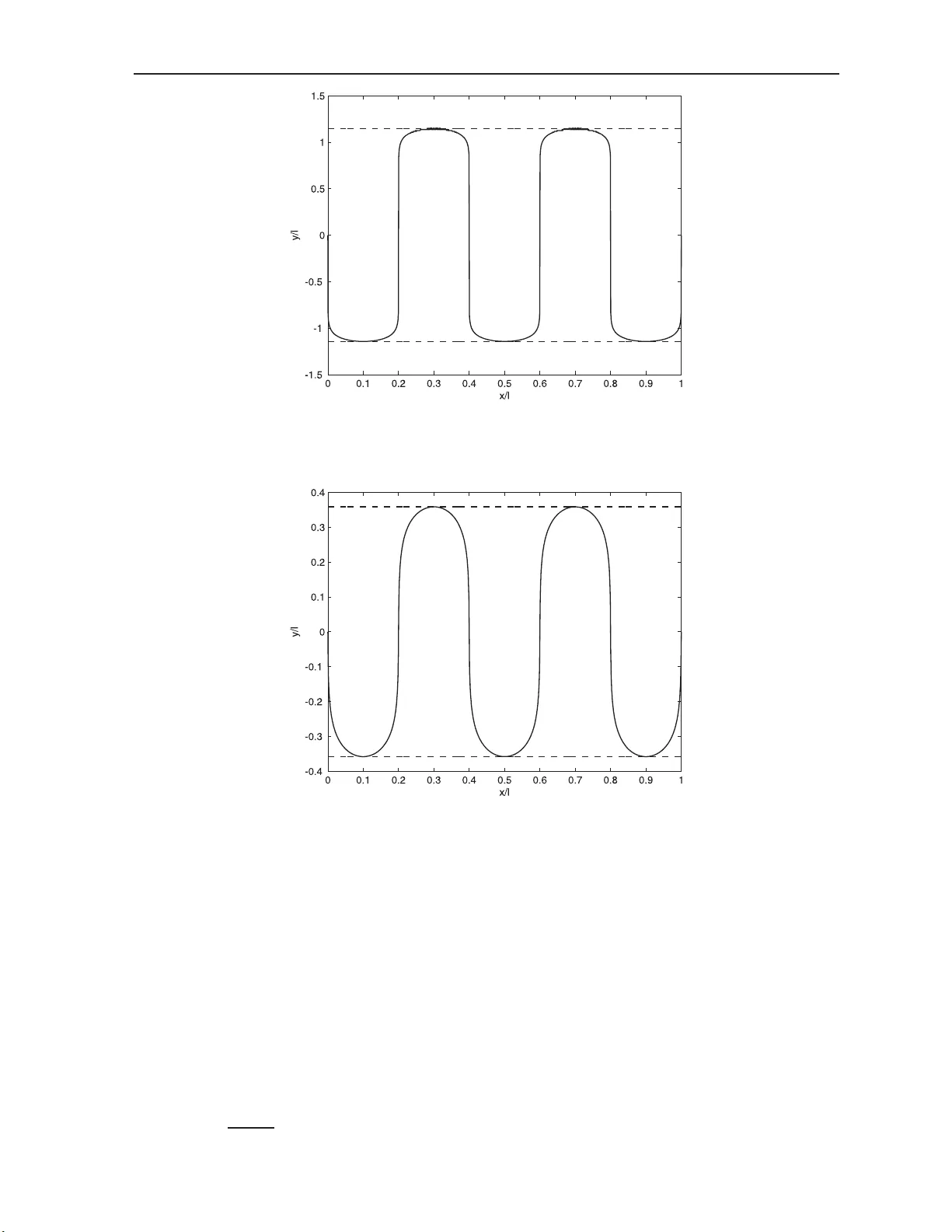
Symmetry , Integrabilit y and Geometry: Metho ds and Applications SIGMA 7 (2011), 052, 19 pages The Role of Symmetry and Separation in Surface Ev olution and Curv e Shortening ⋆ Philip BR OADBRIDGE † and Peter V ASSILIOU ‡ † Scho ol of Engine ering and Mathematic al Scienc es, L a T r ob e University, Melb ourne, Victoria, Austr alia E-mail: P.Br o ad bridge@latr ob e.e du.au ‡ F aculty of Information Scienc es and Engine ering, University of Canb err a, Canb err a, A. C. T., A ustr alia E-mail: Peter.V assiliou@c anb err a.e du.au Received January 23, 2011, in f inal form May 25, 2 011; P ublished online J une 01 , 20 11 doi:10.38 42/SIGMA.20 11.052 Abstract. With few exceptions, known explicit solutions of the curve shortening f lo w (CSE) of a plane cur ve, can be c o nstructed by classical Lie p oint symmetry reductions or by functional separatio n o f v a riables. One o f the functionally sepa r ated so lutions is the ex act curve shortening f lo w o f a c losed, convex “ov al”-shap ed cur ve and another is the smo othing of an initial per io dic curve that is close to a square wa ve. The types of anisotr opic ev ap or ation co ef f icien t are fo und for which the ev apo ration-c o ndensation evolution do es or do es no t hav e solutions that ar e ana logous to the bas ic solutions of the CSE, na mely the gr im reap er trav elling wav e, the homothetic shrinking clo sed cur ve and the homothetically e xpanding grain b ounda ry gro ove. Using equiv a lence cla sses o f a nisotropic dif fusion equatio ns, it is shown that ph ysical mo de ls of ev a p oration-c ondensation must hav e a dif fusivit y function that decr eases as the in verse square of la rge slop e. Some exact separa ted so lutions are constructed for physically cons istent a nisotropic dif fusion equations. Key wor ds: cur ve sho rtening f lo w; e xact s olutions; symmetry; s eparation of v ariables 2010 Mathematics Subje ct Classific atio n: 3 5A30; 3 5K55 ; 58 J70; 74E 10 1 In tro duction The standard curve shortening f lo w is a n on lin ear evo lution by curv ature, ∂ γ ∂ t ( x, t ) = κ ( x, t ) n ( x, t ) , γ ( x, 0) = γ 0 ( x ) , (1) where κ ( x, t ) is the Eu clidean curv ature of γ ( x, t ) and n ( x, t ) is the outw ard u nit normal to the curv e at eac h p oin t. F or the curve-shortening f low parameterized as x 7→ ( x, y ( x, t )), n · e y y t = n · ∂ γ ∂ t ( x, t ) , y t = y xx 1 + y 2 x , (2) whic h describ es the cur v e shortenin g f lo w in Cartesian co ordinates. This equation arises in the practical con text of metal su rface evo lution [24]. More recently , it has b e en used extensivel y as an isotropic cu r v e-smo othing mec hanism in image pro cessing [23 , 25]; see also [9]. Equation (1) is well k n o wn an d has b een the sub ject of several imp ortan t studies, for instance [16, 17]. F ew explicit and exact cur v e shortening f lo ws of plane curves are known in the literature. Some ⋆ This paper i s a contribution to th e Sp ecial I ssue “Symmetry , Separation, Sup er-integrabilit y and Special F unctions (S 4 )”. The full collection is av ailable at http://www.emis. de/journals/SIGMA/S4.h tml 2 P . Broadbrid ge and P . V assiliou similarit y solutions with pr escrib ed-slop e b oundary conditions h a v e b een constructed p aramet- rically in terms of in tegrals of algebraic functions of elemen tary fun ctions [5, 20]. Kin g [21] writes do wn a n um b er non -inv arian t solutions. In addition, there are kno wn to b e v arious self-similar rotating spiral and f lo w er-head solutions [1, 18]. W e demonstrate in th is p ap er how for most solutions k n o wn to us, Lie s ymmetries of v arious t yp es or separable co ord inate systems pla y a vital role and w e conjecture that all currently kno wn solutions and m an y new solutions can b e obtained via a s er ies of h igher order constraints in the metho d of f unctional separation. In Section 2 we b rief ly review the solutions that can b e obtained b y symmetry reduction. In S ection 3, w e sho w how the metho d of fun ctional separation of v ariables reco vers additional interesting explicit, non-self-similar solutions. Some of the prop erties and materials science applications of th ese solutions are develo p ed in more detail. In Section 4, an anisotropic version of the second-ord er Mullins equation is derive d for materials that include a realistic dep endence of ev ap oration co ef f icient on surface orien ta tion. Equiv ale nce classes for anisotropic ev ap oration coef f icien ts are constructed under the Euclidean group. Using the equiv alence classes, in Section 5 w e inv estigate under wh ic h types of anisotrop y , analogs of the standard solutions for isotropic dif f u sion, do or do not exist. Some examples of exact solutions are pro d uced by direct construction and in Section 6 by fu nctional separation of v ariables. 2 Symmetry r eductions of the curv e shortening equation One of the most widely used techniques for constructing explicit, exact solutions of n onlinear partial dif feren tial equations is Lie symmetry r eduction. This has b een extensivel y inv estigated in relation to the partial dif feren tial equ ation (2 ) or its deriv at iv e forms u t = ∂ x [ D ( u ) u x ] , D ( u ) = 1 / 1 + u 2 , (3) κ t = κ 2 κ θ θ + κ 3 , (4) R t = ∂ θ [ R − 2 R θ ] − R − 1 , (5) where u = y x , κ is cur v ature, R = 1 /κ and θ is the orien tation angle along a con v ex curve [2]. Although the stand ard nonlinear dif f usion equation (3) is r arely u sed in the con text of cur v e shortening, it has non-trivial Lie p otenti al symm etries that enable one to constru ct exact simi- larit y solutions [4 ]. The reaction-dif fusion equation in standard form (5 ), another equation that is rarely u s ed in the con text of curve shortening, has b een fully classif ied b y Lie p oin t symmetry reductions [15]. In common with all autonomous nonlin ear dif fu sion equations of second ord er, the curve shortening equ ation (2) is inv arian t under translations in x , y and t , plus the Boltzmann scaling group generated b y x∂ /∂ x + y ∂ y + 2 t∂ /∂ t : ( ¯ x, ¯ y , ¯ t ) = e ǫ x, e ǫ y , e 2 ǫ t . This allo ws the p ossibilit y of t w o typ es of scale-in v ariant similarity solution: the expan d ing solution of the f orm y / √ t − t 0 = G ( x/ √ t − t 0 ), ( t > t 0 ) and the contrac ting solution of the form y / √ t 0 − t = G ( x/ √ t 0 − t ), ( t < t 0 ). Being Eu clidean-in v arian t, (2) has the r otation group as an additional sym metry . Some int eresting exact solutions to th is equation, and consequentl y to (3) can b e constructed by consecutiv e symm etry r eductions [4 ]; see also [11]. The expanding h omothetic similarit y solution with initial-b oun dary conditions y x (0 , t ) = m , y → 0, x → ∞ and y ( x, 0) = 0, w as giv en in [5]. Th e s olution tak es the form of the symmetrized (upp er) curve in Fig. 1, wh ich represents an ev olving grain b oundary gro ov e [24, 5]. Alternativ ely , the ab o v e s olution may b e extend ed s mo othly to the in terior of an obtu se- angled w edge, as sho wn. These and the homothetic solutions in an acute-angled w edge, ob- tainable from the same t yp e of redu ction, make up the “op en-angle” solutions [20 ]. Symmetry and Separation in Sur f ace and Cur v e Flo ws 3 Figure 1. Self-similar ev olution by ev ap or ation near a grain b oundar y gr o ov e (symmetriz e d upper curve) or equiv a le ntly by condensa tio n in an obtuse-angle d wedge. Output times a re at t = 1 and t = 4. The homothetica lly s h rinking simple closed-c urve solution is the circle r = √ 2( t 0 − t ) 1 / 2 . Self-in tersecting closed-curv e “f lo w er-head” solutions w ere giv en in [1]. Steady-state solutions, inv ariant un der time translations, are simp ly the straight lines. Lik e- wise, the solutions that are in v arian t un der spatial translations in a particular direction are simply the straigh t lines in that direction. Another simple kno wn solution is the tra v elling w a v e solution of the form y − ct = G ( x ), whic h is inv arian t und er the tr anslation in space and time generated by ∂ /∂ t + c∂ /∂ y . This is the well-kno w n “Calabi grim reap er” [17], taking the app earance of a sheph erd’s cro ok y − ct = − 1 c log cos( cx ) . Uniformly rotating s olutions of the form r = G ( φ − σ t ) ( r and φ b eing p lane p olar co ordinates) follo w from reduction by the symmetry generated by σ ( − y ∂ /∂ x + x∂ /∂ y ) − ∂ /∂ t . Expanding or con tracting r otating solutions of the in v ariant form r / √ t = G ( φ − σ 2 a 3 log t ) or r / √ − t = G ( φ − σ 2 a 3 log( − t )) follo w f r om reductions un der the one-parameter group generated b y a linear com bination of generators of dilatations and rotations Γ = Γ 4 + σ Γ 5 , Γ 4 = x ∂ ∂ x + y ∂ ∂ y + 2 t ∂ ∂ t , Γ 5 = − y ∂ ∂ x + x ∂ ∂ y . A classif ication of the t yp es of solutions of the asso ciated redu ced ordin ary dif feren tial equa- tions, but without solving them exp licitly and without referring to symmetries, w as giv en re- cen tly by Halldorsson [18]. 2.1 Recipro cal t ransformations It is well known that the class of n onlinear heat equations is stabilised b y r ecipro cal transfor- mations whic h can sometimes b e u sed to generate new solutions from old [22]. A recipro cal transformation ma y b e viewe d as a map of the graph of a solution u ( x, t ) of u t = ( D ( u ) u x ) x 4 P . Broadbrid ge and P . V assiliou to th at of a solution u ′ ( x ′ , t ′ ) of u ′ t ′ = D ′ ( u ′ ) u ′ x ′ x ′ . The map ( x, t, u ) → ( x ′ , t, u ′ ) is def ined by dx ′ = u dx + D ( u ) u x dt, dt ′ = dt, u ′ = 1 u . (6) It can b e sho wn that this indu ces the transformation of dif fusivities D ′ ( s ) = 1 s 2 D 1 s . (7) The dif fus ivit y of interest here D ( u ) = 1 1 + u 2 is seen to b e inv ariant un der the recipro cal transformation, D ′ ( u ′ ) = 1 1 + u ′ 2 = D ( u ′ ) . This r aises the p ossibilit y of using the kno wn solutions and generating new solutions of (3) and hence n ew curve f lo ws by quadr ature. How ever, it turns out that the r ecipro cal transf ormation of solutions of (3) acts geometrically trivially on solutions of the curv e shortening equation. Prop osition 1. Supp ose u ( x, t ) is a solution of (3) and y ( x, t ) the c orr esp onding solution of the c u rve shortening e quation. L et ( x ′ , t ′ , u ′ ) b e the r e cipr o c al tr ansformation of ( x, t, u ) . Then the induc e d tr ansfo rmation on solutions of (2) satisfies ( x ′ , t ′ , y ′ ) = ( y , t, x + c ) , c = const . That is, for e ach t , the r e cipr o c al tr ansformation of a known solution of (3) i nduc es a r efle ction ( up to additive c onstant ) of the solution y ( x, t ) in the line y = x . Pro of . Equ ation (3) and the recipro cal transform ation (6 ) p ermits us to write x ′ = Z x 0 u ( x 1 , t ) dx 1 − Z t a V 0 ( t 1 ) dt, where a is a constant an d V 0 ( t ) = − D ( u (0 , t )) u x (0 , t ). In terms of Cartesian co ordinates ( x, y ), x ′ = Z x 0 y x ( x 1 , t ) dx 1 − Z t a V 0 ( t 1 ) = y ( x, t ) − y (0 , t ) + Z t a D ( y x (0 , t 1 )) y xx (0 , t 1 ) dt 1 = y ( x, t ) − y (0 , t ) + Z t a y t (0 , t 1 ) dt 1 = y ( x, t ) − y (0 , a ) . Then u ′ = 1 /u = 1 /y x = x y = x x ′ . No w as y ′ satisf ies y ′ x ′ = u ′ just as y x = u , then it f ollo w s that y ′ = x + H ( t ′ ). How ever, since y ′ ( x ′ , t ′ ) is to satisfy the curve shortenin g equation y ′ t ′ = y ′ x ′ x ′ 1 + ( y ′ x ′ ) 2 , it follo ws that H = const. Symmetry and Separation in Sur f ace and Cur v e Flo ws 5 Let f 1 b e a function suc h that the ref lection of its graph d ef ines a f unction f 2 . In general f 1 and f 2 will satisfy dif feren t d if ferent ial equations and this can b e very u seful. F or example, the nonlinear dif fusion equation with dif fusivity D ( s ) = s − 2 , seen from (7) to b e directly transformable to the classical linear heat equation ( k = 1), is on e of man y inte grable equations that can b e linearized in its p oten tia l form b y the h o dograph transformation [12]: ( x ′ , y ′ ) = ( y , x ) giv en in Prop osition 1. Ho w ev er , f r om a geometric p oint of v iew a cu rv e and its ref lection are indistiguishable. Th us inv ariance of (3) under r ecipro cal transformations d o es not increase the class of kn own curve f lows. This highlights th e dif f iculty of constru cting solutions of the cu r v e shortening equation and partly explains why so few interesti ng exact solutions are kno wn. 3 F unctional ly separable nonlinear heat equations Apart f r om s y m metry metho ds, one can seek reductions that arise fr om second or higher order dif ferentia l constraints rather th an the f irst order d if ferenti al constrain ts implied b y classical L ie reduction. Unfortunately , there is no general p ro cedure for seeking su c h redu ctions and muc h ef fort has gone in to d evising n ew redu ction strategies for p artial dif feren tial equations. Th us in Do yle and V assiliou [14] the authors m an aged to classify all one-dimensional sour celess heat equations u t = ( D ( u ) u x ) x (8) that admit separation of v ariables in some f ield v aria ble ¯ u . Th at is, one asks for a change of f ield v ariable ¯ u = m ( u ), su c h th at the image of (8) under the c hange of v ariable, constrained b y the additiv ely separable condition ¯ u xt = 0 , is a dif ferentia l sys tem of f inite t yp e that can therefore b e solv ed by ordinary dif ferentia l equa- tions. Indeed the resulting d if ferent ial system has the general form ¯ u t = f ( ¯ u ) ¯ u xx + g ( ¯ u ) ¯ u 2 x , ¯ u xt = 0 , (9) for some fun ctions f > 0, g . It is pr o v en in [14] th at for any such pair f , g th ere is a c hange of dep end en t v ariable that transf orms (9) 1 to (8 ). It tu rns out th at system (9) has a maximal 3- parameter solution space f or any giv en pair f , g . In this mann er the authors obtain exactly n in e distinct d if fusivities D up to the maximal transformation group that preserve s the canonical form (8) for which the maximal 3-parameter solution space is achiev ed. In man y cases the 3- parameter solution was constructed. This considerably extends the list of nonlin ear d if fusion equations for wh ich explicit solutions are av ailable. One equation on the Do yle–V assiliou list is the nonlinear heat equation u t = u x 1 + u 2 x . (10) Th us th e dif ferentia l 1-form ω = u dx + u x 1 + u 2 dt is closed on s olutions of (10). It is easy to see that any function y ( x, t ) s atisfying dy = ω is a solution of the curve shortening equation (2). The solutions of (10) constru cted in [14] are the functions u ( x, t ) = U σ ( x + a ) , σ 2 ( t + b ) , 6 P . Broadbrid ge and P . V assiliou where a , b and σ 6 = 0 are arbitrary constan ts and U is one of the f unctions U ( x, t ) = tan x, U ( x, t ) = x √ − x 2 − 2 t , U ( x, t ) = ± 1 p e 2( x − t ) − 1 , U ( x, t ) = sinh x p − cosh 2 x − e − 2 t , (11) U ( x, t ) = ± cosh x p − sinh 2 x + e − 2 t , U ( x, t ) = sin x √ cos 2 x − e 2 t , U ( x, t ) = sin x √ cos 2 x + e 2 t . Eac h solution (11) provides a 3-parameter family of exp licit curve shortening f lo ws except for the complex-v alued, (11 ) 4 . The function y ( x, t ) ma y b e obtained f rom U ( x, t ) simply by integrati ng in x , then adding a suitable function of t . 1. (11) 1 then leads to the Calabi “grim reap er” tra v elling wa ve. 2. (11) 2 in tegrates to th e w ell-kno wn shrink in g circle x 2 + y 2 = 2( t 0 − t ). 3. In tegratio n of (11) 3 merely pro d uces a horizonta l version of the vertica l grim reap er. 4. (11) 4 is complex-v alued, not consider ed furth er in the current practical con text. 5. (11) 5 is equiv alen t to (11) 7 b y a rotation in the xy -plane. 6. The f inal t w o solutions are related to those previously pr esen ted b y Kin g [21], expressed in the time-rev ersed form as examples of f inger gro wth; these deserve closer insp ection. 3.1 Exact heat f lo w of a conv ex curve The s tu dies of Gage–Ha milton [16] and Gra yson [17] on f lo w b y cur v ature of emb edded p lane curv es is a justly celebrated c hapter in d if ferenti al geometry . Theorem 1 (Gage–Hamilton) . L et γ 0 : I x → R 2 b e a c onvex curve emb e dde d in the plane. L et γ 0 evolve by the curve shortening flow. That i s, ∂ γ ∂ t ( x, t ) = κ ( x, t ) n ( x, t ) , γ ( x, 0) = γ 0 ( x ) , wher e κ ( x, t ) is the Euclide an curvatur e of γ ( x, t ) . Then the c urve r e mains c onvex and b e c omes cir cular as i t shrinks i n the sense that 1) the r atio of the inscrib e d r ad ius to the cir cumscrib e d r adius appr o ach es 1 ; 2) the r atio of the maximum to the minimum curvatur e appr o ach es 1 ; 3) the higher or der derivatives of the curvatur e c onver g e to zer o uniformly. (11) 6 pro vides the only known example of an explicit, non-self similar curv e sh ortening f lo w in case the initial cu rv e γ 0 is a closed, con v ex em b edd ed plane curve whic h is not a circle. W e use results describ ed in S ection 2. T he sixth function in (11) is u = sin x √ cos 2 x − e 2 t . (12) Symmetry and Separation in Sur f ace and Cur v e Flo ws 7 In the case of (12 ), the corresp ond ing solution of (2) is y = t − ln cos x + p cos 2 x − e 2 t . (13) Clearly if y is a solution of (2) then so is − y . Th e tw o solutions join smo othly along y = 0 and can b e jointl y expressed in the simple im p licit f orm cosh y − e − t cos x = 0 . (14) This solution is recorded in [21] and sho wn here to arise from functional separation. Solutions of this t yp e are also studied in [13 ] and referred to as ‘Angenen t o v als’, although explicit solutions are not written down in the latte r pap er. W e will now study some prop erties of this solution. F or eac h t ∈ ( −∞ , 0) equ ation (14) def ines a closed, con v ex “ov al-shap ed” cu rv e which is symmetric ab out the x - and y -axes for x ∈ − cos − 1 e t , cos − 1 e t , y ∈ − cosh − 1 e − t , cosh − 1 e − t . By analogy with an ellipse, eccen tricit y ma y b e def in ed as ǫ ( t ) = p 1 − ( x max /y max ) 2 = s 1 − cos − 1 ( e t ) cosh − 1 ( e − t ) 2 = r 2 3 | t | + O | t | 3 , sho wing appr oac h to circu larity ( ǫ → 0) as t approac hes th e extinction time 0. T h e curv at ure at eac h p oint ( x, t ) of the curv e is κ ( x, t ) = e − t cos x √ e − 2 t − 1 . F or eac h t ∈ ( −∞ , 0), the m axim um curv atur e o ccur s at x = 0 with v alue κ max = e − t / √ e − 2 t − 1, while the minimum o ccurs at the extremities along the minor axis, x = ± cos − 1 e t with v alue κ min = 1 / √ e − 2 t − 1. Hence lim t → 0 − κ max κ min = lim t → 0 − e − t = 1 , v erifying the Gage– Hamilton theorem and more sp ecif ically sho wing that the ratio of maximum to m inim um curv ature is an exp onent ial fun ction conv erging to unit y . Of cours e, the cur v ature itself is an unb ou n ded fun ction of time as the f lo w con tin ues tow ard extinction. It trans pires that for th is curve f lo w, arclength can b e expressed as a function of time in terms of the in complete elliptic inte gral of the f ir st kin d. A t v ery early times t ≪ 0, the solution with x ∈ ( − π / 2 , π / 2) is asymptotic to t w o grim reap ers joined smo othly and appr oac hing eac h other with constant s p eed: y = ± ( t − log cos( x ) − log 2) + O e 4 t sec 4 ( x ) . A qu estion that may b e p osed is: why construct cur v e shortening f lows by f irst solving (10) rather than solving (2) directly? Remark ably , it can b e shown that Prop osition 2. The i mage of the curve shortening e quation (2) under the tr ansfor mation y 7→ m ( y ) do es not have a ( maximal ) 3 -p ar ameter family of joint solutions with the line ar wave e quation y xt = 0 in any field variable m ( y ) exc ept m = identity in which c as e the solution gives rise to the grim-r e ap er flow. 8 P . Broadbrid ge and P . V assiliou Figure 2. Evolution b y hea t shrinking f low of the curve def ined by co s h y − 5 cos x = 0 . Pro of . C on s truct the image of the cur v e shortenin g equation (2) un d er the c hange of v ariable y 7→ m ( y ) and apply the Cartan–K¨ ahler th eorem to the dif feren tial system consisting of the transformed curve shortening equation and the constraint y xt = 0. This is in sharp contrast to th e r ic h separabilit y prop erties of nonlinear heat equations (8) as discussed in Section 2. Th us starting with (10) app ears to b e an imp ortant f ir st step in constructing non-trivial curve f lows 1 . 3.2 Deca ying p erio dic solution initially close t o square w a v e F or a curve f ixed at tw o end-p oin ts, we prescrib e the b oundary cond itions y = 0 , x = 0 , ℓ. W e no w d ef ine dimensionless space and time v ariables X = x/ℓ , Y = y /ℓ , τ = B t/ℓ 2 , in terms of whic h the curv e shortening equation 2 is Y τ = Y X X 1 + Y 2 X , (15) to b e solv ed sub ject to b oundary conditions Y = 0 , X = 0 , 1 (16) and con tin uous initial conditions Y ( X , 0) = Y 0 ( X ) . In tegrating the sev en th mem b er of th e list (11) and then applying translational and scaling in v ariance tr ansformations, we obtain Y = 1 K ln p exp(2 K 2 [ τ − τ 0 ]) + cos 2 ( K [ X − X 0 ]) + cos( K [ X − X 0 ]) exp( K 2 [ τ − τ 0 ]) ! , (17) 1 In view of t he relationship b etw een u ( x, t ) satisfying ( 10) and y ( x, t ) satisfying (2), one might try for the higher order constraint y xxt = 0 rather than y xt = 0. This is p ossible but the calculations rapidly b ecome very complicated as the order increases. 2 Also known in the materials science communit y as the Mul lins e quation [24]. Symmetry and Separation in Sur f ace and Cur v e Flo ws 9 with K , X 0 , τ 0 arbitrary constan ts. It ma y b e verif ied that (17 ) satisf ies (15). In fact, wh en τ − τ 0 is large and n egativ e, Y = ln 2 K − K [ τ − τ 0 ] + 1 K ln cos( K [ X − X 0 ]) + O e − 2 K 2 [ τ 0 − τ ] cos( K [ X − X 0 ]) ! . This shows that a w a y from the s in gularities of ln cos( X − X 0 ), the solution is asymptotic in the distan t past to the Calabi “grim reap er” solution of the cur v e-shortening f lo w [17]. A t all times, the solution (17) is a deformation of the grim reap er s olution but now it is extended smo othly and p erio dically , without singularities o v er a domain of any length. Unlik e in the grim r eap er solution, there are f ixed p oin ts so that we may ap p ly the Diric hlet b oundary conditions (16), whic h lead to Y = ± 1 K ln p exp(2 K 2 [ τ − τ 0 ]) + s in 2 ( K X ) + sin( K X ) exp( K 2 [ τ − τ 0 ]) ! , (18) with K = nπ ℓ . The amplitude of Y ( X , τ ), w hic h is the v alue of | Y ( X , τ ) | at X = ± π / (2 K ), is ap p ro ximated by Y max = K [ τ 0 − τ ] + (ln 2) /K + O exp − K 2 | τ − τ 0 | . In terms of dimensional quantit ies, y max = nπ B [ t 0 − t ] ℓ + ℓ ln 2 nπ + O exp − n 2 π 2 B [ t 0 − t ] /ℓ 2 , (19) where y max = ℓY max and t 0 = ℓ 2 τ 0 /B . This sho ws that at early times, the amplitude decreases linearly as a function of time. As an example, the solution is graph ed for th e case n = 5 and w ith th e minus sign preceding the r igh t hand side of (18). The solution at early times is sho wn in Figs. 3, 4. Although for large τ 0 , the in itial condition resembles a p erio d ic square w a v e, it actually conv erges p oint wise to a dif ferentia ble b ounded and p erio dic grim reap er as τ 0 approac hes ∞ . When K 2 [ τ − τ 0 ] is large and p ositiv e, the solution is smo other, appro ximated b y a single sine wa v e, Y = ± exp( − K 2 [ τ − τ 0 ]) K sin( K x ) + O exp( − 2 K 2 [ τ − τ 0 ]) , (20) whose amplitude decreases exp onentia lly in time. This is the sinusoidal solution of the classical linear dif fusion equation that approxima tes the cur v ature dr iv en d if fusion equation at large times in the small-slop e appr o ximation. The n um b er of extrema n within the f ixed domain [0 , 1] ma y b e fr eely c h osen. F or large v alues of the parameter K 2 τ 0 , as in Fig. 3, the initial cond ition is describ ed w ell as a p erio dic square wa ve, resem bling a dif fraction grating. The time scale for deca y may b e view ed as th e time at whic h the formal expression (19) for Y max is zero. This is t = t 0 + ℓ 2 ln 2 n 2 π 2 B . Fig. 3 evidences considerable smo othing of the initial conditions but at this time, the solution do es not ye t resem ble a simple sinusoid. At larger times, the solution is close to a single sinusoidal w a v e. In the regime of the s inusoidal prof ile, from (20) deca y times are shorter, of the order of the standard time ( ℓ/nπ ) 2 /B that is familiar from exp onen tial d eca y of F ourier mo des in linear dif fu sion m o dels (e.g. [10]) wh en the h alf-w a v elength ℓ/n is the t ypical d istance b et w een neigh b oring regions of high and lo w mass concent ration. 10 P . Broadbrid ge and P . V assiliou Figure 3 . Filled curve: exact solution with τ − τ 0 = − 0 . 07 , K = 5 π . Dashed lines : approximate bo unds y = ± K [ τ 0 − τ ] + (ln 2) /K . Figure 4 . Filled curve: exact solution with τ − τ 0 = − 0 . 02 , K = 5 π . Dashed lines : approximate bo unds y = ± K [ τ 0 − τ ] + (ln 2) /K . 4 Surface ev olution b y ev ap oration and condensation F or s ome metals su c h as gold, su rface dif fu s ion p ersists for sev eral thou s and y ears as the d om- inan t surface transp ort mechanism bu t for others su c h as magnesium, after a time less than a da y , sur face ev olution o ccurs predominan tly by ev ap oration-condensation. As describ ed by Mullins [24], the Gibbs –Thomson relation for ev ap oration rate in terms of def icit from equi- librium pressu re ov er a cur v ed surface, leads to a second-order equation for dif f u sion b y mean curv atur e. In terms of t w o-dimensional Cartesian co ordinates ( x, y ) and time t , the Mullins equation for p oints on a material su r face is y t = B y xx 1 + y 2 x , Symmetry and Separation in Sur f ace and Cur v e Flo ws 11 where B is constan t. Th is equation applies to t w o dimensional cross sections of solids when surface nano-scale features suc h as gro o v es, ridges and furr ows extend rectilinearly into the third dimens ion. Because of the nonlinearity , very few usefu l exact solutions to this equ ation are kno wn [8], except in a linear ap p ro ximation. Two decades ago [5], the exact solution w as constructed in parametric int egral form for nonlinear su r face ev olution near a symmetric grain b ound ary , with constan t slop e at the grain b oun dary gro o v e, initial f latness and zero disp lace- men t at inf inity . A similar pr o cedure pro du ces the more general “op en angle” solutions for dep osition in a w edge [20]. Su bsequently , the four th-order Mullins equation for curv at ure-driven surface dif fusion on an almost-isotropic material, w as solv ed with b ou n dary conditions r epre- sen ting a symmetric grain b ou n dary [6, 28, 7]. In the con text of sur face ev ap oration, the parallel asymptotes of the grim reap er solution represent a long thin m etallic foil that is ev ap orating at the ends. The constan t tra v elling-w av e sp eed of the grim reap er solution sh ows that ev aporation will tak e place at a constant rate that dep end s on foil thic kness as well as the ev aporation co ef f icien t B . The thickness ∆ x is the distance b etw een the t w o asymptotes, ∆ x = π B /c . Hence the steady ev ap oration rate at the end of a strip of metallic f oil will b e c = π B / ∆ x . F or example, for a foil of a f ew m icrons in thic kness made of the v olatile metal Mg, this rate will b e of the order of one millimetre p er millenium. In the conte xt of metal surface smo othing, the p erio dic s olution of the previous section predicts the smo othing of initial conditions that resemble a d if fraction grating. F or a surf ace f ixed at tw o end -p oints, w e prescrib e the b oundary cond itions y = 0 , x = 0 , ℓ. Ph ysically , this corresp ond s to the surface b eing clamp ed and shielded from the surround ing atmosphere outside of the exp osed spatial d omain [0 , ℓ ]. 4.1 Ev ap oration from anisotropic c rystals C. Herr ing [19], show ed that f or anisotropic crystals, sur f ace energy is prop ortional to b ( φ )( γ + γ ′′ ( φ )), where φ is the p olar angle arctan y x , γ is surface tension and b is an ev ap oration co ef f icien t. An equation of th e form y t = D ( y x ) y xx , (21) implying the s tandard n onlinear d if fusion equation (8) with u = y x , may b e regarded as an anisotropic form of the Mullins ev aporation-condensation equ ation y t = B ( y x ) y xx 1 + y 2 x , with surface slop e-dep endent anisotropy factor B ( y x ) = D ( y x )(1 + y 2 x ), whic h originates in the physic al deriv at ion from a constan t m ultiple of b ( φ )( γ + γ ′′ ( φ )) (e.g. [27]). Crystalline materials are indeed anisotropic, with the ev ap oration co ef f icient min imized wh en the cut surface is alig ned with crys tal planes. The group of equiv alence transformations of this class of equations includes the general linear grou p GL (2 , R ). By the p olar decomp osition theorem, eac h inv ertible linear transformation can b e decomp osed as an othogonal transformation follo w ed by m ultiplication by a p ositiv e def inite symm etric dilatation matrix. Under a rotation ab out the origin by angle α , ¯ x = x cos α − y sin α, ¯ y = x sin α + y cos α, ¯ t = t, ¯ u = ¯ y ¯ x = u + tan α 1 − u tan α , y x = − sin α + ¯ y ¯ x cos α cos α + ¯ y ¯ x sin α , y xx = ¯ y ¯ x ¯ x (cos α + ¯ y ¯ x sin α ) 3 . 12 P . Broadbrid ge and P . V assiliou The axis ¯ x = 0 h as b een rotated b y angle − α/ 2. W riting ¯ θ = arctan ¯ y ¯ x , y t = n · e ¯ y n · e y ¯ y ¯ t = cos ¯ θ cos( ¯ θ − α ) ¯ y ¯ t = 1 cos α 1 1 + ¯ y ¯ x tan α ¯ y ¯ t . Hence, by rotation, the isotropic nonlinear dif fusion equation (21) is equiv alent to ¯ y ¯ t = ¯ D ( ¯ y ¯ x ) ¯ y ¯ x ¯ x , ¯ D ( s ) = 1 ( s sin α + cos α ) 2 D s cos α − sin α s sin α + cos α . T ritsc her [26] used this device of rotatio nal equiv alence classes to solve inte grable forms of fourth-order surface dif f usion equations. In particular, after rotation by angle α = π / 2, ¯ D ( ¯ y ¯ x ) = 1 ¯ y 2 ¯ x D − 1 ¯ y ¯ x . By follo wing the π / 2 rotation by a trivial ref lection ¯ x → − ¯ x , w e reco ver the result of the recipro cal transformation (7). By the principal axis theorem, a p ositiv e symmetric m atrix can b e written as O t QO , where O is a rotation matrix and Q is diagonal, Q j i = a i δ j i with a j > 0. Therefore, to consider the ef fect of an additional dilatation, we need only consid er th e ef f ect of a diagonal rescaling: ¯ x = a 1 x, ¯ y = a 2 y , ¯ y t = a 2 1 D a 1 a 2 ¯ y ¯ x ¯ y ¯ x ¯ x , whic h although trivial, allo ws us to construct simple anisotropic mo dels from the rotationally in v ariant isotropic mo del. 5 Anisotropic analogs of isotropic mo del solutions The scale in v ariance group still ap p lies to th e general anisotropic dif fu sion equation (21). There- fore b oth expanding and sh rinking t yp es of similarit y solution exist but they ma y b e signif ican tly dif ferent f rom th ose of the isotropic mo del. The grain b oundary gro o v e solution still exists, as can b e seen from the solv abilit y of the reduced b oundary v alue pr oblem on R + × R + , u = F ( ρ ) , ρ = xt − 1 / 2 , − ρ 2 F ′ ( ρ ) = d dρ [ D ( F ) F ′ ( ρ )] , F (0) = m > 0 , F ( ρ ) → 0 , ρ → ∞ . The grain-b oun dary gro o v e solutions for all mo dels hav e some common f eatures. Although it represent s a highly anisotropic material, the linear mo del gro ov e solution app ro ximates that of an isotropic mo del for gro ov e slop es of up to 0.5, whic h was used in Mu llins’ original pap er [24]. Ho w ev er, whereas the linear m o del predicts that the gro o v e depth increases in p rop ortion to m , the gro o v e d ep th increases very slowly , of ord er (log m ) 0 . 5 at large m for the isotropic mo del [3]. 5.1 Anisotropic homothetically shrinking closed curv e F or anisotropic ev ap orating materials, the closed-curve homothetic solution r epresen ts the f ixed- shap e cross section of an ev ap orating wire, which is circular when the material is isotropic. The homothetic ev ap orating closed-curv e solution satisf ies y = [ t 0 − t ] 1 / 2 G ( ρ ) , ρ = x [ t 0 − t ] − 1 / 2 , Symmetry and Separation in Sur f ace and Cur v e Flo ws 13 − G 2 + ρ 2 G ′ ( ρ ) = G ′′ ( ρ ) D ( G ′ ) , G ′ (0) = 0 , G ( ρ 0 ) = 0 , G ′ ( ρ ) → ∞ , ρ → ρ 0 . This implies u = F ( ρ ) , F = G ′ , ρ 2 F ′ ( ρ ) − D ′ ( F )( F ′ ) 2 = F ′′ ( ρ ) D ( F ) , (22) F (0) = 0 , F ( ρ ) → ∞ , ρ → ρ 0 . F or s ome functions D ( u ), th e homothetic closed-curv e solution d o es not exist. F or example, with the linear mo d el with constant D , th e general solution satisfying F (0) = 0 must b e F ( ρ ) = √ π 2 A erf ( ρ ) = A Z ρ 0 e − s 2 / 4 ds, A ∈ R . Since this cannot tak e an inf inite v alue at an y p oin t ρ = ρ 0 ∈ R , the closed-curv e homothetic solution do es not exist. Let u s no w assume that F ( ρ ) ≈ A 0 ( ρ 0 − ρ ) ν . If a homothetic closed-curve solution exists, G ( ρ 0 ) ∈ ( −∞ , 0), and 0 = G ( ρ 0 ) = G (0) + Z ρ 0 0 F ( s ) ds. This can h old only if the inte gral do es not diverge , imp lying − 1 < ν < 0 . No w w e su pp ose that at large u, D ( u ) is asymptotic to a p o w er la w D ( u ) ≈ D 0 u n . Th en by balancing terms at the leading order in ρ 0 − ρ , (22) implies ( i ) n = 1 /ν , whic h is less than − 1, and ρ 0 = − 2 ν D 0 A 1 /ν 0 , or, ( ii ) n = 1 − ν ν , whic h is less than − 2. F or the linear mo del, the anisotrop y factor is B ( u ) = (1 + u 2 ) D whic h dive rges w hen the curv e is v ertical. In the current app lication, w e are in terested in cases of r ealistic anisotrop y for whic h the ev a p oration co ef f icient and the anisotrop y factor are b oun d ed, and the latter with a minimum v alue greater than zero: ∀ u ∈ R , 0 < B 0 < B ( u ) < B ∞ < ∞ . That state men t must b e true, indep endent of the orien ta tion of the coordin ate axes. F or example after rotation by π / 2 it must b e true that ¯ D ( ¯ u ) → ¯ D 0 ∈ (0 , ∞ ) as ¯ u → 0. By rotating bac k to the original orien tation, this implies D ( u ) = u − 2 ¯ D ( u ) ∼ ¯ D 0 u − 2 . This p h ysical restriction r ules out scenario ( ii ) in the ab o v e leading-order analysis. The simplest example satisfying the restriction is D ( u ) = 1 / (1 + ( β u ) 2 ) ( β ∈ R c onstan t) for which the anisotrop y factor B ( y x ) v aries b et w een 1 and β 2 . In this case th e homothetic solution is simp ly an ellipse x 2 2[ t 0 − t ] + y 2 2 β 2 [ t 0 − t ] = 1 elongated in the direction of we ak est ev aporation. 14 P . Broadbrid ge and P . V assiliou 5.2 Grim reap er solution for anisotropic material The grim reap er solution is a tra v elling wa ve constrained b et w een t w o v ertical asymptotes. This implies a steady state solution of th e equation u t = [ D ( u ) u x ] x . F or arbitrary D ( u ), there exists a t w o-paramete r steady state solution u s ( x ) = K − 1 ( cx + c 2 ) , where K ( u ) = Z u 0 D ( s ) ds whic h is an increasing inv ertible function b ecause D ( s ) > 0. Th is inte grates f ormally to y ( x, t ) = y 0 ( t ) + Z x 0 u s ( x 1 , t ) dx 1 . It then follo ws from (21) that y 0 ( t ) can only b e a constant- v elocity translation, y 0 = c ( t − t 0 ). This trav elling w a v e solution d o es not necessarily ha v e a v ertical asymptote. F or example, there is no such asymptote wh en D is constan t. Ho w ev er if D ( s ) satisf ies th e ph ysical requirement D ( s ) ≈ s − 2 , it f ollo ws that K ( u ) has a f inite limit as u → ∞ , therefore K − 1 has a v ertica l asymptote at some lo cation x = x 0 , dup licated at x = − x 0 if D ( s ) is an eve n function, as is commonly the case when the x -axis denotes the orien tati on of the crystal p lanes from wh ere ev ap oration is w eak est. 6 Anisotropic mo dels allo wing fun ctional separation The classif ication of Do yle and V assiliou giv es all fu nctions D ( s ) for whic h functional separation of v ariables is p ossible in the general form ¯ u = f ( u ) = v ( x ) + w ( t ) , (23) with f an in v ertible fun ction. The simplest example of a physica lly feasible isotropic mo del is simply that obtained from the isotropic dif fus ion equation by unequ ally rescaling x and y . F or example, Fig. 2 could b e dilated in one d ir ection, disp la ying a non-homothetic closed curv e approac hing a homothetically shrinking ellipse. The only other member of the Doyle –V assiliou list with realistic anisotrop y is muc h more complicated: D ( u ) = D 0 cos( z ( Au )) , Au = Z z 0 (cos s ) − 3 / 2 ds, − π / 2 < z < π / 2 . (24) This m o del is close to isotropic wh en A = √ 2. In that case, it is easy to show th at wh en u (= y x ) is small, B ( u ) = 1 + O ( u 4 ) and B → 2 as u → ∞ . In Fig. 5, the fun ction D ( u ) /D 0 for this weakly anisotropic mo del is compared to D ( u ) /D 0 of the isotropic mo d el. F or th e sake of completeness, we constru ct the sp ecial solution u ( x, t ) compatible with (23), that was n ot giv en exp licitly by Do yle and V assiliou [14]. Th e parameter A ma y b e c hanged by rescaling u . F or con v enience, w ithout loss of generalit y we n o w set A to 1. Also w e may set D 0 to 1 by using D 0 t as the time co ord inate. F rom th e general approac h of Do yle and V assiliou [14], ¯ u is a su m of sep arated fun ctions v ( x ) and w ( t ) satisfying v ′′′ ( x ) + 1 2 [ v ′ ( x )] 3 = 0 , (25) Symmetry and Separation in Sur f ace and Cur v e Flo ws 15 Figure 5. Nonlinear dif fusivity function D ( u ) for isotro pic ev apor ation (lower) and anisotr opic mo del (upper ). w ′ ( t ) = W ( w ) = cos w v ′′ cos v + 1 2 ( v ′ ) 2 sin v + sin w − v ′′ sin v + 1 2 ( v ′ ) 2 cos v . By construction, the follo wing are f irst in tegrals of (25), whic h can b e v erif ied b y substitution: λ = v ′′ ( x ) cos v + 1 2 ( v ′ ) 2 sin v , µ = − v ′′ ( x ) sin v + 1 2 ( v ′ ) 2 cos v . It then follo ws that w ′ ( t ) = λ cos w + µ sin w , an d that t = 2 R 2 Z dw sin( w + δ ) , x = 1 R Z v 0 ds p cos( s − δ ) , (26) with constan ts x 0 , t 0 , R = ± 2 1 / 2 ( µ 2 + λ 2 ) 1 / 4 and δ = arctan( λ/µ ), whose arb itrariness is of little consequence. Let v ′ ( x ) = W ( v ), so v ′′ ( x ) = W W ′ ( v ). Then W W ′ ( v ) cos v + 1 2 W 2 sin v = λ, − W W ′ ( v ) sin v + 1 2 W 2 cos v = µ ⇒ − λ tan v + 1 2 W 2 sin 2 v cos v + 1 2 W 2 cos v = µ ⇒ W 2 = 2( µ cos v + λ sin v ) = R 2 cos( v − δ ) ⇒ v ′ ( x ) = ± R p cos( v − δ ) , x = 1 R Z v 0 ds p cos( s − δ ) . When w e includ e the parameter B 0 , the general solution for v and w in terms of elemen tary functions, the standard elliptic in teg ral F ( θ | 1 2 ) and the stand ard Jacobi elliptic function sn ( X | 1 2 ), is w = 2 arctan e R 2 B 0 t/ 2 − δ and v = 2 arcsin 1 √ 2 sn R [ x − x 0 ] √ 2 1 2 + δ , where x 0 = √ 2 R F arcsin √ 2 sin δ 2 1 2 . 16 P . Broadbrid ge and P . V assiliou Figure 6. Portion of solution curve for anisotropic model with R = 1 a nd δ = 0, at t = 0. Figure 7. Portion of solution curve for anisotropic model a t t = − 2 . 0. Since u is a function of w ( t ) + v ( x ), we see that the c hoice of parameters R and δ has little consequence on the form of the solution u ( x, t ). A sh ift in the phase v ariable δ has the ef fect of a translation in x by x 0 ( δ , R ). A change of amplitude R has the ef fect of rescaling x and t to R x and R 2 t . Mo dulo a time-dep end en t v ertical tran s lation, the cur v e y ( x, t ) is obtained f r om u ( x, t ) by in tegratio n. Since the integ rands in (24) and (26) m ust b e r eal v alued, the constructed solution has a truncated domain. An example is giv en in Figs. 6–8. As t approac hes −∞ , the solution ap p roac hes a steady state. S ince D ( u ) is sym metric, this steady state is a symmetric grim reap er. It is app ro ximated in Fig. 8 b y taking t = − 8 . 0. The curve is not symmetric, as can b e seen in Fig. 7. Th is asymm etry causes its domain to shift slightly from righ t to left. F or t ≤ 0, the curve h as a vertica l asymptote at moving lo cation x = x u = Z π / 2 − w ( t ) 0 (cos s ) − 1 / 2 ds Symmetry and Separation in Sur f ace and Cur v e Flo ws 17 Figure 8. Portion of solution curve for anisotropic model a t t = − 8 . 0. and a lo cal minimum at x = x ℓ = − Z w ( t ) 0 (cos s ) − 1 / 2 ds. 7 Conclusion Of the exact solutions to the curve shortening equation known to u s, most can b e obtained by Lie p oint symmetry reductions. The t w o in teresting solutions th at cannot b e constructed in this w a y , can indeed b e reco v ered by fu nctional separation of v ariables for the s tand ard n onlinear dif fusion equation (3) th at is obtained from the curv e s hortening equation by dif feren tiation. The classif ication obtained b y Do yle and V assiliou [14] of nonlinear dif f u sion equations that admit fu n ctional separation of v ariables, leads to the tw o exact non-self-similar solutions with non-trivial initial conditions that app ear to b e ac hiev able in an app ro ximate sense in applica- tions. In addition, it leads to a new separated solution for a physicall y realistic anisotropic ev ap oration-condensation dif fusion equation. Although the s econd ord er n onlinear su rface evo- lution equations for slop e u ( x, t ) ( ≡ y x ( x, t ) admit a num b er of p ossibilities for functional se- paration of v ariables in Cartesian co ordinates, w e h a v e pro v ed that this is not p ossible for the equation (2) go v ern ing y ( x, t ), n or is it p ossible in a co ordinate system consisting of canonical v ariables for a s ymmetry other th an translation. This is in contrast with the p oint symmetry analysis, whic h leads to a ric her arra y of p ossibilities for the ev olution of y ( x, t ) than for the ev olution of u ( x, t ). The inv ariance of the isotropic equation (10) und er the well known r ecipro cal tr an s formation w as sho wn (Prop osition 1 ) to lead to no new planar curve heat f lo ws. The group of geometric equiv alence transformations of the class of general anisotropic equations (21 ) includes n ot only the reciprocal transformation in the guise of a ref lection in the p lane, but the wh ole general linear group. The equ iv alence is shown by carrying out the equiv alence transformations explicitly . Ph ysical ev aporation co ef f icient s must ha v e a p ositiv e real v alue w hen the surface is orien ted along the crystal planes. Since physical restrictions must b e indep endent of orien tation of the co ordinate axes, it follo ws from the equiv ale nce tr an s formations that the nonlin ear d if fusivity D ( y x ) m ust b eha v e lik e y − 2 x at large-slop e. This also allo ws for th e existence of a closed n on- circular homothetic solution whic h cannot exist unless D ( u ) decreases faster than u − 1 . Th e Do yle– V assiliou classif ication pr o duces another anisotropic mo d el that satisf ies this ph ysical 18 P . Broadbrid ge and P . V assiliou requirement . An exact solution has b een constructed, inv ol ving Jacobi elliptic f unctions and other inv erse integral s of rational functions. Exact solutions sometimes ha v e the adv ant age of leading to concise conceptually simple relationships. F or example, Fig. 3 demonstrates the ef f icacy of a simple expr ession for w a v e amplitude of a corru gated nano-scale surface in the early stages of s m o othing by ev ap oration- condensation when the system cannot b e adequately describ ed b y a linear m o del. How ever, exact solutions can b e obtained only in v ery sp ecial cases of initial and b oundary conditions, so that appro ximate numerical solution metho ds will contin u e to b e imp ortan t. Ac kno wledgemen ts This pap er is sub mitted in appr eciatio n of the v aluable on-going cont ributions of Professor Willard Miller J r. The f irst auth or gratefully ac kno wledges sup p ort by the Australian Researc h Council u nder pro ject DP1095044 . References [1] Abresch U ., Langer J. The normalized curve shortening f lo w and homothetic solutions, J. Differ ential Ge om. 23 (1986), 175–196 . [2] Angenent S., On the formation of singulari ties in the cu rve shortening f lo w, J. Differ ential Ge om. 33 (1991), 601–633 . [3] Arrigo D.J., Broadbridge P ., T ritscher P ., K arciga Y., The dep th of a steep eva p orating grain b ound ary groov e: app lication of comparison theorems, Math. Comput. Mo del ling 25 (1997), no. 10, 1–8. [4] Bluman G.W., Reid G.J., Kumei S., New classes of symmetries for partial dif ferential eq uations, J. Math. Phys. 29 (1988), 806–811, Erratum, J. Math. Phys. 29 (1988), 2320. [5] Broadbridge P ., Exact solv ability of the Mullins nonlinear dif fusion mo del of groov e d evel opment, J. Math. Phys. 30 (1989), 1648–1651. [6] Broadbridge P ., T ritscher P ., An integrable fourth- order n onlinear evolution equation applied to th ermal grooving of metal surfaces, IMA J. Appl. Math. 53 (1994), 249–265. [7] Broadbridge P ., Goard J.M., T emp erature-d ep endent surface dif fusion near a grain b ound ary , J. Engr g. M ath. 66 (2010), 87–102. [8] Cahn J.W., T a ylor J.E., Overview no. 113 s urface motion b y surface dif fusion, A cta Metal l . M ater. 42 (1994), 1045–10 63. [9] Cao F., Geometri c cu rve ev olution and image pro cessing, L e ctur e Notes i n Mathemat ics , V ol. 1805, S pringer- V erlag, Berlin, 2003. [10] Carsla w H.S., Jaeger J.C. Conduction of heat in solids, 2nd. ed ., Clarendon Press, Oxford, 1959. [11] Chou K.- S., Li G.-X., Optimal systems and inv ariant solutions for the curve shortening problem, Comm. Ana l. Ge om. 10 (2002), 241–274 . [12] Clarkson P .A., F ok as A.S., Ablo witz M.J., Hodograph transformations of linearizable p artial dif ferential equations, SIAM J. Appl. Math. 49 (1989), 1188–1209. [13] Dask alo p oulos P ., Hamilton R., Sesum N., Classif ication of compact ancient solutions to the curve shortening f low, J. Di ffer ential Ge om. 84 ( 2010), 455–465 , [14] Do yle P .W., V assiliou P .J., Separation of v aria bles for the 1-d imensional non-linear dif fusion equation, Internat. J. Non-Line ar Me ch. 33 (1998), 315–326. [15] Galaktiono v V.A., Dorodnitsyn V.A., Elenin G.G., Kurdyumov S .P ., Samarskii A.A., A quasilinear equation of heat condu ction with a source: p eaking, lo calization, symmetry , exact solutions, asymptotic b ehavior, structures, J. Soviet Math. 41 (1988), 1222–1 292. [16] Gage M., Hamilton R., The heat equ ation shrinking convex plane curves, J. Differ ential Ge om. 23 ( 1986), 69–96. [17] Gra yson M. 1987 The heat equ ation shrinks em b edded plane curves to round p oints, J. Differ ential Ge om. 26 (1987), 285–314 . Symmetry and Separation in Sur f ace and Cur v e Flo ws 19 [18] Halldorsson H.P ., Self-similar solutions to the curve sh ortening f low, arXiv:1007.1617 . [19] Herring C., Surface tension as a motiv ation for sin tering, in T he Physics of P o wder M etallurgy , Editor W.E. Kingston, McGra w-Hill, 1951, 143–179. [20] Ishimura N., Curv ature evolution of plane curves with prescrib ed op ening angle, Bul l. Aus tr al. Math. So c. 52 (1995), 287–296 . [21] King J.R., Emerging areas of mathematical modelling, R. So c. L ond. Phil os. T r ans. Ser. A Math. Phys. Eng. Sci. 358 (2000), no. 1765, 3–19. [22] Kingston J.G., Rogers C., Recipro cal B¨ acklund transformatio ns of conserv atio n la ws, Phys. L ett. A 92 (1982), 261–264 . [23] Malladi R., Seth ian J.A., Image pro cessing via level set curvature f lo w, Pr o c. Nat. A c ad. Sci. USA 92 (1995), 7046–70 50. [24] Mullins W.W., Theory of thermal grooving, J. Appl. Phys. 28 (1957), 333–339 . [25] Olver P .J., Sapiro G., T an nenbaum A., Inv aria nt geometric evolutions of surfaces and vo lumetric smo othing, SIAM J. Appl. Math. 57 (1997), 176–194. [26] T ritscher P ., Integra ble n onlinear evol ution equations app lied to solidif ication and su rface redistribution, PhD Thesis, Universit y of W ollongong, 1995. [27] T ritscher P ., An integrable fourth- order n onlinear evolution equation applied to surface redistribution du e to capillarit y , J. Aus tr al. Math. So c. Ser. B 38 (1997), 518–541. [28] T ritscher P ., Broadbridge P ., Grain b oun dary grooving by surface dif fusion: an analytic nonlinear mo del for a sy mmetric groov e, Pr o c. R oy. So c. L ond. A 450 (1995), n o. 1940, 569–587.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment