Towards Realistic Vehicular Network Modeling Using Planet-scale Public Webcams
Realistic modeling of vehicular mobility has been particularly challenging due to a lack of large libraries of measurements in the research community. In this paper we introduce a novel method for large-scale monitoring, analysis, and identification of spatio-temporal models for vehicular mobility using the freely available online webcams in cities across the globe. We collect vehicular mobility traces from 2,700 traffic webcams in 10 different cities for several months and generate a mobility dataset of 7.5 Terabytes consisting of 125 million of images. To the best of our knowl- edge, this is the largest data set ever used in such study. To process and analyze this data, we propose an efficient and scalable algorithm to estimate traffic density based on background image subtraction. Initial results show that at least 82% of individual cameras with less than 5% deviation from four cities follow Loglogistic distribution and also 94% cameras from Toronto follow gamma distribution. The aggregate results from each city also demonstrate that Log- Logistic and gamma distribution pass the KS-test with 95% confidence. Furthermore, many of the camera traces exhibit long range dependence, with self-similarity evident in the aggregates of traffic (per city). We believe our novel data collection method and dataset provide a much needed contribution to the research community for realistic modeling of vehicular networks and mobility.
💡 Research Summary
The paper addresses a critical gap in vehicular network research: the lack of large‑scale, realistic mobility datasets. The authors propose a novel data collection framework that leverages publicly available traffic webcams distributed worldwide. Over a period of several months, they harvested images from 2,700 webcams across ten major cities (North America, Europe, Asia, and Australia), amassing 125 million frames amounting to roughly 7.5 TB of raw data—the largest vehicular mobility dataset reported to date.
To transform raw images into a quantitative traffic density metric, the authors develop an efficient background‑subtraction algorithm. For each camera, a temporal moving‑average filter (window size ≈ 100 frames) generates a low‑pass “background” image representing static scene elements (road, buildings). Subtracting this background from each incoming frame yields a high‑pass residual that highlights moving objects (vehicles, pedestrians). Rather than performing computationally intensive object detection, the method simply thresholds the residual and counts the proportion of “active” pixels, producing a normalized density value that reflects road occupancy. This approach is robust to heavy congestion where vehicle contours merge, and it scales to millions of frames with modest computational resources.
Statistical analysis of the resulting time series was conducted at two levels. First, individual camera traces were fitted to four candidate distributions (Log‑Logistic, Gamma, Weibull, Exponential). Using Kolmogorov‑Smirnov tests and Akaike Information Criterion for model selection, the authors find that in four cities at least 82 % of cameras are best described by a Log‑Logistic distribution, while in Toronto 94 % conform to a Gamma distribution. Aggregated city‑wide data also pass KS‑tests for these two distributions at the 95 % confidence level, indicating that they capture the bulk behavior of vehicular density across diverse urban environments.
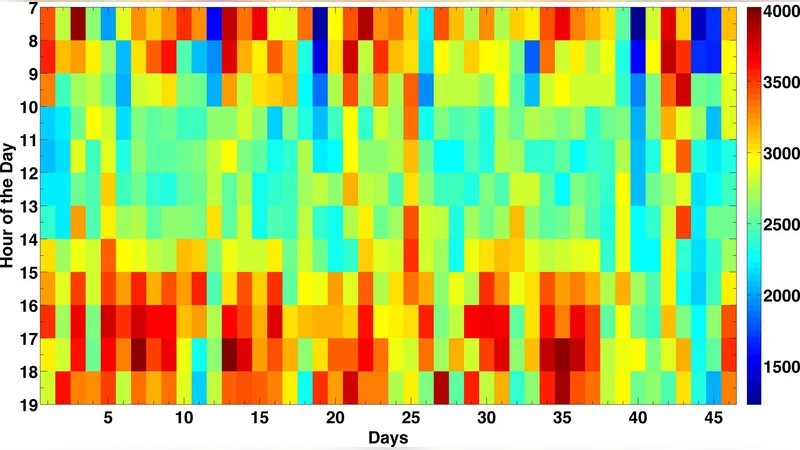
Second, the authors investigate long‑range dependence (LRD) and self‑similarity. Hurst exponent estimates consistently exceed 0.5, and variance plots across multiple time scales (minutes, hours, days) reveal persistent correlations. This evidence contradicts the common assumption of memoryless (Poisson or exponential) inter‑arrival processes in vehicular modeling, suggesting that traffic flow exhibits heavy‑tailed, correlated dynamics.
The paper’s contributions are fourfold: (1) creation and public release of an unprecedented, planet‑scale vehicular density dataset; (2) a lightweight, scalable algorithm for extracting traffic density from raw webcam imagery; (3) empirical validation that Log‑Logistic and Gamma distributions are the most appropriate statistical models for vehicular density; and (4) demonstration of long‑range dependence and self‑similarity in real traffic streams.
Limitations include sensitivity to illumination changes, weather conditions, and occasional camera outages, which can introduce noise into the density estimates. The method also does not differentiate vehicle types or speeds, focusing solely on occupancy. Future work outlined by the authors involves integrating deep‑learning based object detection to refine density estimates, extending the pipeline to handle night‑time and adverse‑weather imagery, and applying the dataset to evaluate vehicular networking protocols (e.g., V2V, V2I) under realistic mobility patterns. The authors also plan to develop a real‑time streaming infrastructure and open‑source tools to enable the broader research community to exploit this rich resource.
Comments & Academic Discussion
Loading comments...
Leave a Comment