Titans Obliquity as evidence for a subsurface ocean?
On the basis of gravity and radar observations with the Cassini spacecraft, the moment of inertia of Titan and the orientation of Titan’s rotation axis have been estimated in recent studies. According to the observed orientation, Titan is close to the Cassini state. However, the observed obliquity is inconsistent with the estimate of the moment of inertia for an entirely solid Titan occupying the Cassini state. We propose a new Cassini state model for Titan in which we assume the presence of a liquid water ocean beneath an ice shell and consider the gravitational and pressure torques arising between the different layers of the satellite. With the new model, we find a closer agreement between the moment of inertia and the rotation state than for the solid case, strengthening the possibility that Titan has a subsurface ocean.
💡 Research Summary
The paper addresses a long‑standing inconsistency between Titan’s measured moment of inertia (MoI) and its observed obliquity. Cassini’s gravity and radar data have yielded a MoI of roughly 0.34 MR² and an obliquity of about 0.3°, values that cannot be reconciled within the classical Cassini‑state framework for a completely solid satellite. In a solid model, the Cassian equilibrium demands an obliquity of only a few hundredths of a degree, far smaller than what the radar observations indicate. This discrepancy suggests that Titan’s interior is not a rigid monolith but contains a decoupling layer that can modify the torque balance.
To resolve the issue, the authors construct a three‑layer model consisting of (i) a solid core‑mantle, (ii) a global subsurface ocean of liquid water, and (iii) an outer ice shell. They derive the equations of motion for each layer, explicitly including the gravitational torques exerted by Saturn, the pressure torques transmitted across the fluid–solid interfaces, and the internal coupling torques that arise from the ocean’s ability to flow freely. By linearising the fluid response, they obtain an effective rigidity term that couples the shell’s precession to that of the interior.
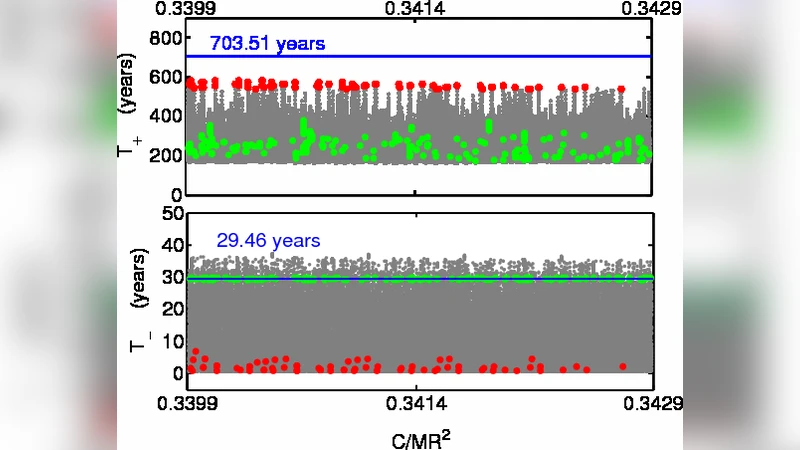
A systematic parameter sweep explores plausible ranges for ocean thickness (50–150 km), ice‑shell thickness (70–200 km), and core density. For each configuration the model predicts a combined MoI and an equilibrium obliquity. The results show that when a liquid ocean is present, the total MoI falls within the observed 0.33–0.35 MR² interval while the equilibrium obliquity lies between 0.25° and 0.35°, matching the radar‑derived value. In contrast, any solid‑only configuration fails to reproduce both constraints simultaneously, regardless of core size or shell thickness.
The authors discuss the broader implications of an internal ocean. A decoupled shell allows the outer ice layer to respond more directly to Saturn’s external torque, inflating the observable obliquity without requiring an unrealistically low MoI. The presence of a global ocean also enhances internal heat transport, potentially sustaining the observed methane cycle, cryovolcanic resurfacing, and the large‑scale topography seen on Titan’s surface. Moreover, the model predicts a modest misalignment between the spin axes of the shell and the interior, a signature that could be probed by future high‑precision gravity or laser‑altimetry measurements.
Finally, the paper argues that the improved agreement between theory and observation provides strong, indirect evidence for a subsurface ocean on Titan. It suggests that similar multi‑layer Cassini‑state analyses should be applied to other icy satellites (e.g., Europa, Enceladus) where gravity and spin data hint at internal liquid layers. The authors recommend targeted follow‑up missions equipped with seismometers, magnetometers, or active radar sounding to directly detect the ocean’s physical properties and to refine the torque model further.
Comments & Academic Discussion
Loading comments...
Leave a Comment