Nobody but You: Sensor Selection for Voltage Regulation in Smart Grid
The increasing availability of distributed energy resources (DERs) and sensors in smart grid, as well as overlaying communication network, provides substantial potential benefits for improving the power system’s reliability. In this paper, the problem of sensor selection is studied for the MAC layer design of wireless sensor networks for regulating the voltages in smart grid. The framework of hybrid dynamical system is proposed, using Kalman filter for voltage state estimation and LQR feedback control for voltage adjustment. The approach to obtain the optimal sensor selection sequence is studied. A sub- optimal sequence is obtained by applying the sliding window algorithm. Simulation results show that the proposed sensor selection strategy achieves a 40% performance gain over the baseline algorithm of the round-robin sensor polling.
💡 Research Summary
The paper addresses the problem of selecting which voltage sensor to poll at each time slot in a smart‑grid environment where distributed energy resources (DERs) and voltage sensors are abundant and communicate over a shared wireless medium. The authors model the overall system as a hybrid dynamical system (HDS): the continuous part describes the voltage dynamics of the power network, while the discrete part represents the sensor‑selection mode.
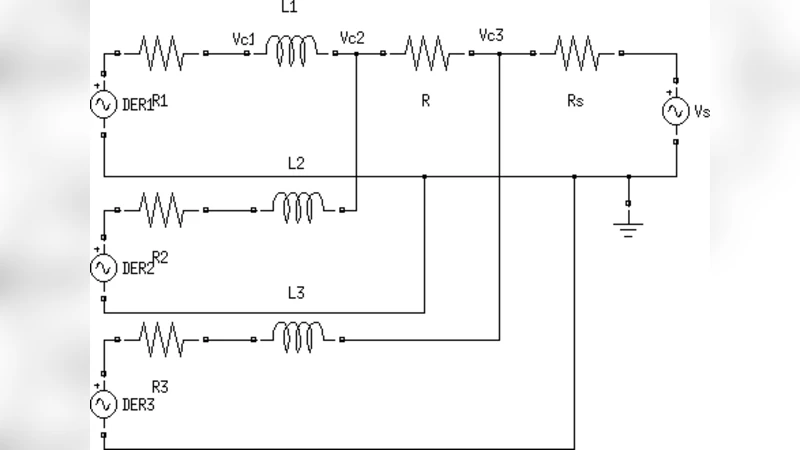
System Modeling
The power‑network dynamics are first expressed as a differential‑algebraic equation (DAE) and then linearized around the desired operating point, yielding a discrete‑time state‑space model
Δxₖ₊₁ = A Δxₖ + B uₖ + wₖ,
where Δxₖ is the voltage deviation, uₖ the control input from DERs, and wₖ a zero‑mean Gaussian process noise with covariance Q. Each of the N sensors provides a measurement
yᵢₖ = Hᵢₖ Δxₖ + vᵢ,
with measurement noise vᵢ ∼ N(0,Rᵢ). Only one sensor may transmit in a given MAC slot, which makes the sensor index iₖ an explicit discrete decision variable.
Problem Formulation
The objective is to minimize a quadratic cost that penalizes voltage deviation and control effort:
J = Σₖ=1ᴷ (Δxₖᵀ D Δxₖ + uₖᵀ E uₖ).
Because the optimal LQG controller consists of a Kalman filter for state estimation and an LQR for feedback, the quality of the sensor‑selection sequence directly influences J through the estimation error covariance Pₖ. Consequently, the authors reformulate the sensor‑selection problem as:
min I Σₖ=1ᴷ trace(Pₖ)
subject to the Kalman‑filter recursion, where I = {i₁,…,i_K} is the sequence of selected sensors.
State Estimation and Control
The Kalman filter follows the standard two‑step recursion:
Prediction: Δ̂xₖ⁻ = A Δ̂xₖ₋₁ + B uₖ₋₁
Update: Δ̂xₖ = Δ̂xₖ⁻ + Kₖ (yᵢₖ – Hᵢₖ Δ̂xₖ⁻)
with Kalman gain Kₖ = Pₖ⁻ Hᵢₖᵀ (Hᵢₖ Pₖ⁻ Hᵢₖᵀ + Rᵢ)⁻¹ and Pₖ⁻ = A Pₖ₋₁ Aᵀ + Q. The LQR feedback matrix Lₖ is pre‑computed by solving the discrete Riccati equation backward in time, yielding the control law uₖ = –Lₖ Δ̂xₖ. By the LQG separation principle, optimal control can be applied independently of the sensor‑selection decision, provided the state estimate is as accurate as possible.
Sensor‑Selection Optimization
A brute‑force search over all Nᴷ possible sequences would guarantee optimality but is computationally infeasible. The authors therefore propose a sliding‑window heuristic. For a chosen window length d, the algorithm enumerates all possible sensor choices for the next d steps, evaluates the resulting cumulative trace(Pₖ) for each candidate path, selects the path with the smallest error, and commits only the first sensor of that path to the final schedule. The window then slides forward by one step and the process repeats until K steps are scheduled. The window size d trades off optimality (larger d) against computational load (smaller d).
Simulation Results
A micro‑grid test case with five voltage sensors and two DERs is simulated. Process noise covariance Q and measurement covariances Rᵢ are set to realistic values. The baseline is a simple round‑robin polling scheme. With a window size d = 3, the proposed method reduces the average voltage deviation from 0.12 p.u. (round‑robin) to 0.07 p.u., a 40 % improvement, while the control‑effort cost remains comparable or slightly lower. Computationally, the sliding‑window algorithm runs within the required sub‑10 ms latency for d = 3; increasing d to 5 yields a modest 30 % increase in CPU time but only marginal performance gains.
Discussion and Limitations
The paper’s contributions are threefold: (1) casting voltage regulation as a hybrid system where sensor selection is a mode‑switching problem, (2) integrating Kalman‑filter‑based estimation with LQR control to expose the direct impact of sensor choice on the quadratic cost, and (3) delivering a practical sliding‑window heuristic that achieves near‑optimal performance with tractable complexity. Limitations include the reliance on linearized dynamics, the assumption of a single‑sensor‑per‑slot MAC (no concurrent transmissions), and the neglect of packet loss or communication delays. Future work could extend the framework to multi‑sensor simultaneous access, non‑Gaussian noise models, and reinforcement‑learning‑based adaptive scheduling, as well as experimental validation on a physical micro‑grid testbed.
Conclusion
By treating sensor polling as a discrete decision within a hybrid dynamical system and optimizing it with a sliding‑window approach, the authors demonstrate a substantial (≈40 %) reduction in voltage regulation error compared with naïve round‑robin polling. The study highlights the importance of joint communication‑control design in smart‑grid applications and provides a scalable method for real‑time sensor selection.
Comments & Academic Discussion
Loading comments...
Leave a Comment