Relative velocity of sliding of microtubules by the action of Kinesin-5
Kinesin-5, also known as Eg5 in vertebrates is a processive motor with 4 heads, which moves on filamentous tracks called microtubules. The basic function of Kinesin-5 is to slide apart two anti-parallel microtubules by simultaneously walking on both the microtubules. We develop an analytical expression for the steady-state relative velocity of this sliding in terms of the rates of attachments and detachments of motor heads with the ATPase sites on the microtubules. We first analyse the motion of one pair of motor heads on one microtubule and then couple it to the motion of the other pair of motor heads of the same motor on the second microtubule to get the relative velocity of sliding.
💡 Research Summary
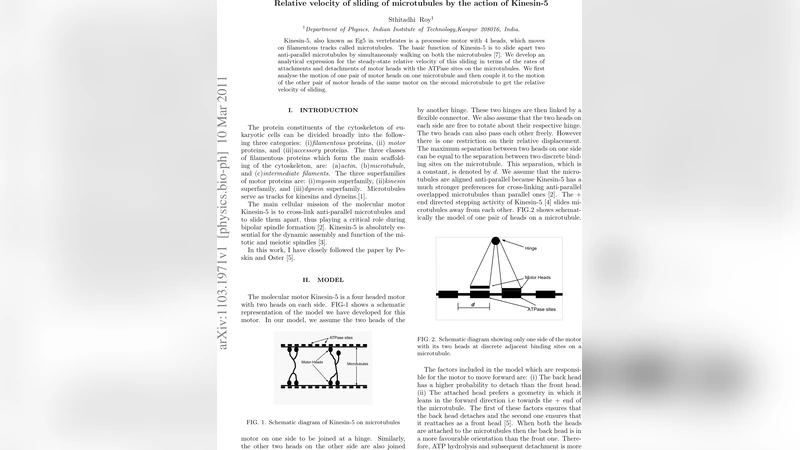
The paper presents a theoretical analysis of how the bipolar mitotic motor kinesin‑5 (also known as Eg5) generates relative sliding between two antiparallel microtubules. Kinesin‑5 is a tetrameric motor with four catalytic heads, arranged as two pairs on opposite sides of a central hinge, and the two hinges are linked by a flexible connector. To make the problem tractable, the authors reduce each pair of heads to a single “mid‑point” that captures the average position of the two heads on a given microtubule. The motion of the two mid‑points is then coupled by a geometric constraint reflecting the finite separation allowed between the heads (|x₁‑x₂| ≤ d/2, where d is the spacing between adjacent tubulin binding sites).
The stochastic dynamics of a single pair of heads are described by four kinetic parameters: α (attachment rate of a free head), β_b (detachment rate of the rear head), β_f (detachment rate of the front head), and p (probability that a newly attached head binds in front of the bound head, with 1‑p for binding behind). The allowed states are 11 (both heads bound), 10 and 01 (one head bound). Master equations for the probabilities P_j (mid‑point at integer site j) and P_{j+½} (mid‑point at half‑integer site) are written, and steady‑state solutions yield the total probabilities M₀ = Σ_j P_j and N₀ = Σ_j P_{j+½}. From these, the average velocity of a single mid‑point is derived as
⟨v⟩ = (α d)/(α+γ)
Comments & Academic Discussion
Loading comments...
Leave a Comment