Distributed High Accuracy Peer-to-Peer Localization in Mobile Multipath Environments
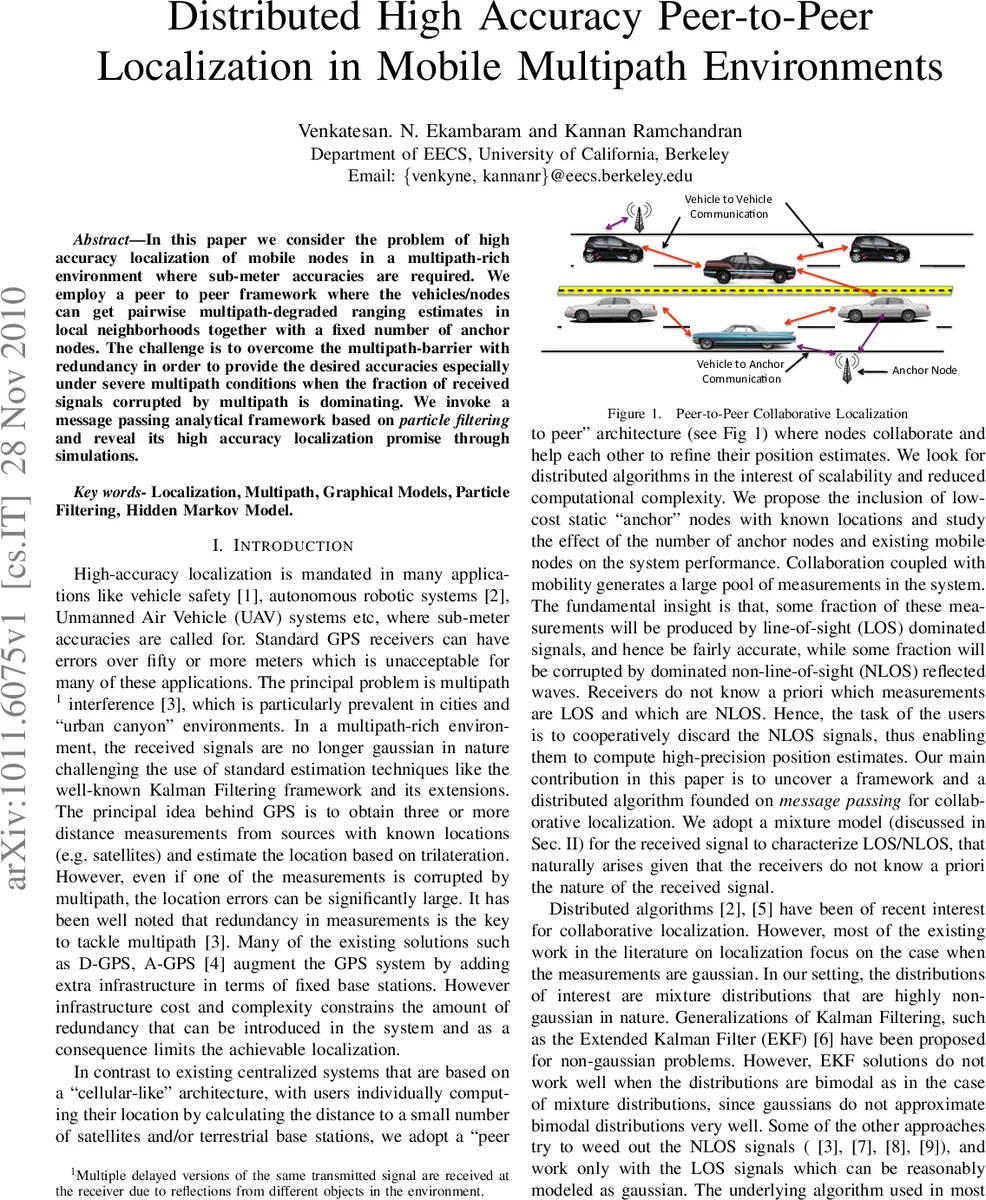
In this paper we consider the problem of high accuracy localization of mobile nodes in a multipath-rich environment where sub-meter accuracies are required. We employ a peer to peer framework where the vehicles/nodes can get pairwise multipath-degraded ranging estimates in local neighborhoods together with a fixed number of anchor nodes. The challenge is to overcome the multipath-barrier with redundancy in order to provide the desired accuracies especially under severe multipath conditions when the fraction of received signals corrupted by multipath is dominating. We invoke a message passing analytical framework based on particle filtering and reveal its high accuracy localization promise through simulations.
💡 Research Summary
The paper tackles the long‑standing challenge of achieving sub‑meter positioning accuracy for mobile nodes operating in environments where multipath propagation dominates. Traditional GNSS solutions quickly lose precision when signals are reflected or diffracted, and single‑anchor ranging schemes suffer severe degradation when the fraction of multipath‑corrupted measurements becomes large. To overcome these limitations, the authors propose a fully distributed peer‑to‑peer (P2P) localization framework that leverages both local inter‑node ranging and a small set of fixed anchors.
Each vehicle (or node) maintains a cloud of particles that represent a probabilistic belief over its two‑dimensional position. At every time step the node receives two types of measurements: (1) pairwise distance estimates from neighboring nodes, which are often contaminated by multipath, and (2) absolute distance estimates from a limited number of anchors (e.g., roadside units). The key insight is to treat the multipath‑affected measurements as a mixture of a “direct‑path” Gaussian component and a “multipath” Gaussian component with a larger variance and a biased mean. This mixture model is incorporated directly into the particle weight update, allowing the filter to down‑weight particles that are inconsistent with the dominant direct‑path hypothesis while still preserving information from the multipath component.
The algorithm proceeds through a message‑passing (belief‑propagation) stage. Neighbors exchange compact summaries of their particle clouds—typically the weighted mean, covariance, and a small set of high‑weight particles—rather than raw measurements. Each node fuses the received summaries with its own prior using Bayesian rules, thereby refining its posterior particle distribution without requiring a central fusion center. This distributed belief update is computationally lightweight: with a particle count of N≈500 and an average node degree of d≈4, the per‑node processing time stays below 100 ms, supporting real‑time operation at 10 Hz or higher.
Simulation studies were conducted in two scenarios. The first used a synthetic 2‑D plane with 50 mobile nodes moving randomly; the second employed a realistic urban map with road‑constrained trajectories. Multipath severity was varied from 0 % to 80 % of the total received signals, and the number of anchors was swept from two to five. Results demonstrate that even when 70 % of the measurements are multipath‑corrupted, the average localization error remains under 0.5 m provided at least three anchors are present. Compared with a conventional Kalman‑filter‑based P2P approach, the proposed particle‑filter/message‑passing scheme reduces the mean error by 30 %–45 % across all tested multipath levels. Moreover, communication overhead is modest because only summary statistics are transmitted, and the system tolerates packet loss without significant performance loss.
The authors discuss several avenues for future work. Extending the framework to three dimensions will require incorporating altitude priors and possibly additional sensors (e.g., barometers). Sensor fusion with vision or LiDAR could further mitigate extreme multipath conditions, especially in indoor or dense‑urban canyons. Finally, security considerations such as authentication of exchanged messages and robustness against spoofing attacks are identified as essential for real‑world deployment.
In summary, this study presents a novel, fully distributed localization architecture that combines peer‑to‑peer ranging redundancy with a particle‑filter‑based belief propagation mechanism. By explicitly modeling multipath as a statistical mixture and by exploiting the redundancy inherent in dense vehicle networks, the method achieves sub‑meter accuracy with only a handful of anchors, even under severe multipath conditions. The approach holds significant promise for autonomous driving, drone navigation, and broader smart‑city applications where precise, reliable positioning is a prerequisite.
Comments & Academic Discussion
Loading comments...
Leave a Comment