Towards Physarum robots: computing and manipulating on water surface
Plasmodium of Physarym polycephalum is an ideal biological substrate for implementing concurrent and parallel computation, including combinatorial geometry and optimization on graphs. We report results of scoping experiments on Physarum computing in conditions of minimal friction, on the water surface. We show that plasmodium of Physarum is capable for computing a basic spanning trees and manipulating of light-weight objects. We speculate that our results pave the pathways towards design and implementation of amorphous biological robots.
💡 Research Summary
The paper investigates the use of the slime‑mold Physarum polycephalum as a living substrate for unconventional computation and manipulation when it is placed on a water surface, a medium that offers virtually no friction. The authors cultivated plasmodial Physarum on wet paper towels, then transferred active fragments onto experimental arenas consisting of Petri dishes (20 mm and 90 mm in diameter) and larger rectangular containers (200 × 150 mm) partially filled with distilled water. Data points were represented by small pieces of plastic foam (5–10 mm) either fixed to the bottom or left floating; oat flakes placed on the foam served as nutrient sources.
When introduced onto the water surface, the plasmodium extended tree‑like pseudopodia to explore the arena and locate the nutrient‑laden foam pieces. Initially a dense network of branches formed, providing exhaustive spatial sampling. As the organism sensed the nutrient locations, redundant branches retracted and the network converged to a near‑minimal spanning tree that connected all food sources. Because the protoplasmic tubes are only weakly adhered to the water surface, they can contract and straighten freely, a behaviour not possible on solid substrates where tubes become permanently anchored. This tube straightening effectively shortens the transport paths and can generate pulling forces between two floating nodes.
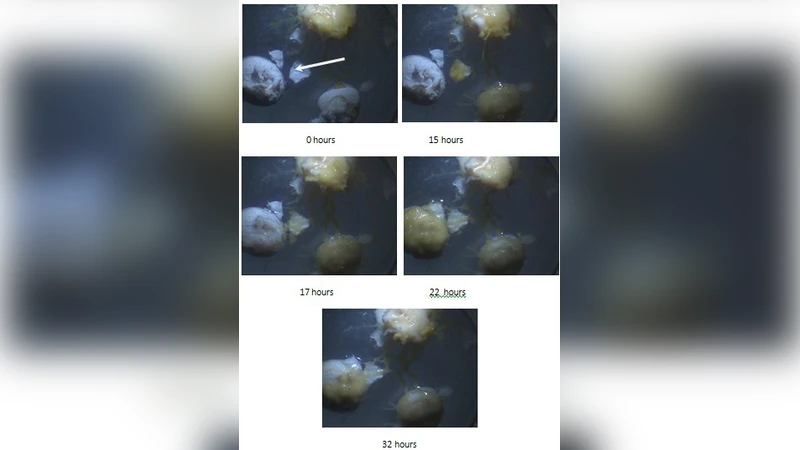
Beyond computation, the authors demonstrated that the living network can physically manipulate lightweight objects. In a “push” experiment, a floating foam piece placed near a growing pseudopodium was displaced away as the advancing tip generated surface ripples that exerted a reactive force on the object. In a “pull” experiment, a foam piece positioned between two anchored nodes was first contacted by a pseudopodium, then, after the organism reached a nutrient source on the opposite node, the connecting tube contracted, drawing the floating piece toward the nutrient. These actions show that Physarum can both exert forces on and be guided to move external matter, provided the mass is sufficiently low and the water surface tension is not overwhelmed.
The discussion links these observations to the four essential capabilities of distributed robotic systems: sensing, computation, locomotion, and manipulation. Water was chosen because it supplies an ideal humidity, continuously removes metabolic waste, and minimizes friction, thereby allowing the organism to remain active for extended periods. The authors propose extending the Kolmogorov‑Uspensky storage‑modification machine model—previously implemented biologically with Physarum—by adding “PUSH NODE” and “PULL NODE” operations, effectively turning the organism into a mechanical data‑structure manipulator. They suggest that node attributes could be encoded using food‑color preferences, enabling selective movement of marked nodes.
Limitations are acknowledged. In larger containers the air volume hampers the formation of stable chemo‑attractant gradients, leading to occasional growth of pseudopodia in nutrient‑free directions. The experiment did not achieve simultaneous pulling of two separate floating objects, and the manipulation is currently limited to very light items. Future work must address gradient stability, scaling to larger environments, and refined external control (e.g., light or electrical stimuli) to achieve reliable, programmable actuation.
In summary, the study provides the first experimental evidence that Physarum polycephalum can perform graph‑theoretic computation and lightweight object manipulation on a water surface, thereby offering a viable biological platform for amorphous robotics. The findings open avenues for developing living, self‑organizing machines that integrate sensing, computation, and actuation without conventional hardware, and they lay groundwork for more sophisticated bio‑robotic prototypes and mechanical implementations of storage‑modification machines.
Comments & Academic Discussion
Loading comments...
Leave a Comment