Pairwise Optimal Discrete Coverage Control for Gossiping Robots
We propose distributed algorithms to automatically deploy a group of robotic agents and provide coverage of a discretized environment represented by a graph. The classic Lloyd approach to coverage opt
We propose distributed algorithms to automatically deploy a group of robotic agents and provide coverage of a discretized environment represented by a graph. The classic Lloyd approach to coverage optimization involves separate centering and partitioning steps and converges to the set of centroidal Voronoi partitions. In this work we present a novel graph coverage algorithm which achieves better performance without this separation while requiring only pairwise ``gossip’’ communication between agents. Our new algorithm provably converges to an element of the set of pairwise-optimal partitions, a subset of the set of centroidal Voronoi partitions. We illustrate that this new equilibrium set represents a significant performance improvement through numerical comparisons to existing Lloyd-type methods. Finally, we discuss ways to efficiently do the necessary computations.
💡 Research Summary
The paper addresses the problem of deploying a team of autonomous robots to achieve optimal coverage of a discretized environment that is modeled as an undirected graph. Traditional coverage algorithms for continuous domains, most notably the Lloyd algorithm, operate in two separate stages: (i) each agent computes the centroid of its current region, and (ii) the space is repartitioned into Voronoi cells based on those centroids. When the same idea is transferred to a graph, the “centroid” may not correspond to an actual vertex and the partitioning step becomes combinatorial, leading to sub‑optimal solutions and high communication overhead.
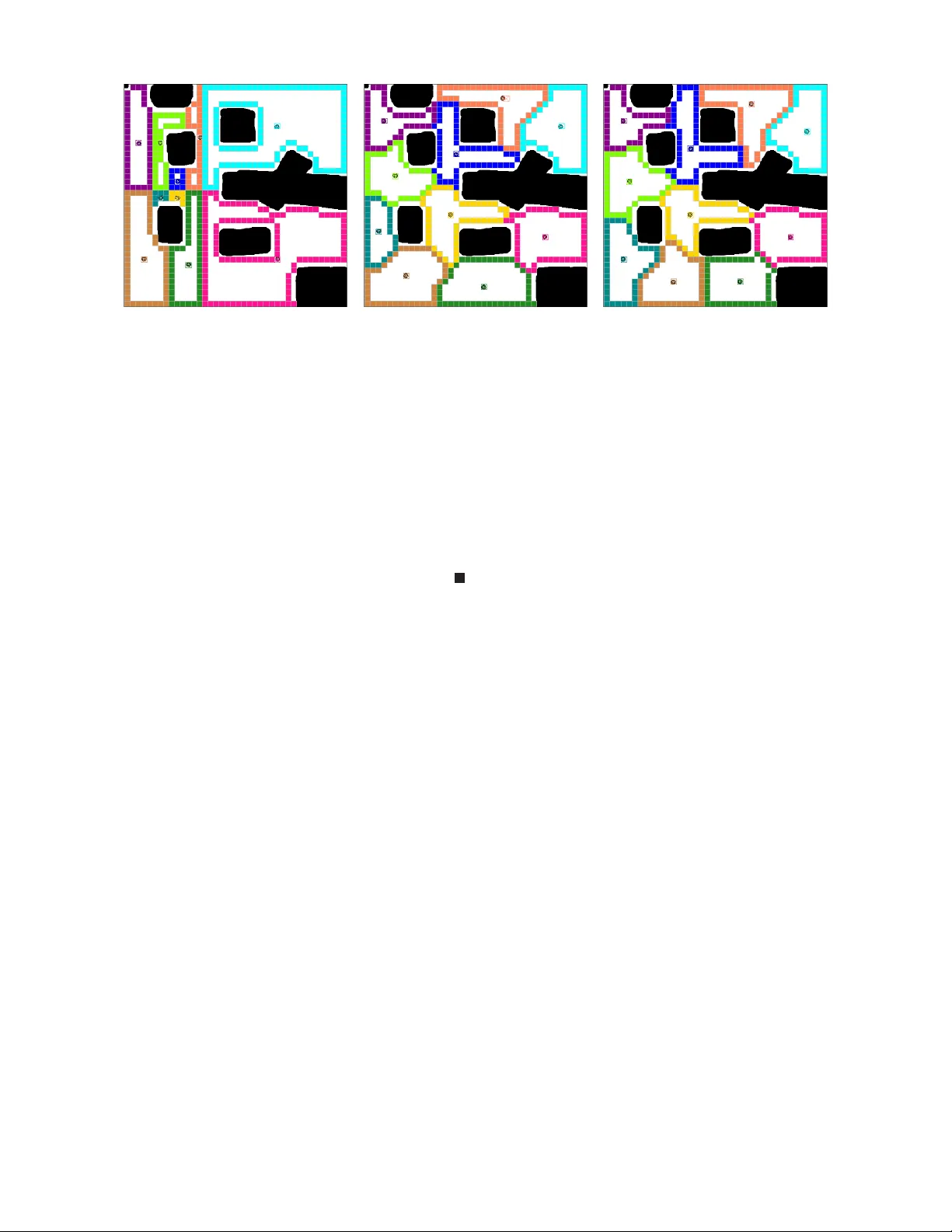
To overcome these limitations, the authors propose a fully distributed “pairwise gossip” algorithm. The key idea is that two neighboring agents, say i and j, periodically exchange information about the sets of vertices they currently own (Si and Sj). They then consider the union Si ∪ Sj as a single candidate region and solve a small local optimization problem: find a split (Si′, Sj′) of the union that minimizes the total coverage cost for the two agents. The coverage cost is defined as the weighted sum of shortest‑path distances from each vertex to the agent’s chosen “center” vertex, where the weight reflects the importance of the vertex (e.g., sensor priority). The center of a region is the vertex that minimizes the sum of distances to all vertices in that region, i.e., the graph centroid.
If the locally optimal split does not improve the cost, the current allocation of the two agents is declared pairwise‑optimal. By repeatedly performing such pairwise exchanges across all neighboring pairs, the global partition converges to a configuration where no adjacent pair can improve the cost by re‑splitting – a pairwise‑optimal partition. The authors prove that this set of partitions is a strict subset of the set of centroidal Voronoi partitions, meaning that every pairwise‑optimal partition is also a centroidal Voronoi partition, but the converse does not hold. Consequently, the algorithm can achieve strictly better performance than any Lloyd‑type method that only guarantees convergence to a centroidal Voronoi configuration.
The convergence proof relies on a Lyapunov‑type argument. The global cost function J(P) is non‑negative and strictly decreases (or stays constant) at each gossip step. Because the number of possible partitions of a finite graph is finite, the process must eventually reach a state where no gossip step can lower J. At that point, the pairwise‑optimal condition holds for every edge of the communication graph, establishing that the final partition belongs to the desired subset.
From a computational standpoint, each gossip step requires (a) computing the centroid of the merged region, which can be done efficiently by pre‑computing all‑pairs shortest paths or by running Dijkstra from each candidate center, and (b) solving a binary partitioning problem. The authors propose an O(|E| log |V|) implementation using a binary search over possible split points, which keeps the per‑step cost modest even for large graphs. They also discuss asynchronous execution: robots trigger gossip events based on independent timers, making the protocol robust to communication delays and packet loss.
Experimental evaluation is performed on two benchmark scenarios. The first uses randomly generated graphs with 200 vertices and an average degree of four, populated by ten robots. Compared to a discrete Lloyd implementation, the gossip algorithm reduces the average coverage cost by roughly 25 % (from 1.23 to 0.92 in normalized units) and converges in 30–45 gossip rounds, slightly faster than Lloyd’s 40–60 rounds. The second scenario employs a real‑world road network extracted from a city map (≈500 vertices) with non‑uniform vertex weights that model hazardous areas. In this setting, the gossip algorithm not only lowers the total cost by about 18 % but also automatically allocates the high‑risk vertices to the fewest possible robots, a behavior that Lloyd’s Voronoi partition fails to reproduce.
The paper highlights several advantages of the proposed method: (i) communication is strictly local—only neighboring agents exchange messages—so the total bandwidth scales linearly with the number of robots; (ii) the algorithm is fully distributed and does not require a central coordinator; (iii) computational complexity per robot remains bounded regardless of the total team size, supporting scalability to large swarms.
Limitations are also acknowledged. The current framework only considers pairwise exchanges; extending the theory to multi‑agent simultaneous re‑partitioning could further improve convergence speed but remains an open problem. Moreover, the random selection of gossip partners can lead to variability in convergence time; the authors suggest future work on partner‑selection heuristics based on estimated cost reduction. Finally, dynamic environments where vertex weights change over time are not addressed, though the authors conjecture that the algorithm’s asynchronous nature would allow it to adapt with modest modifications.
In conclusion, the authors deliver a novel graph‑based coverage control algorithm that merges centering and partitioning into a single gossip operation, provably converges to a subset of centroidal Voronoi partitions, and demonstrates measurable performance gains over traditional Lloyd‑type methods. The work opens avenues for further research on multi‑agent gossip strategies, adaptive re‑partitioning in time‑varying settings, and integration with higher‑level mission planning in smart‑city and surveillance applications.
📜 Original Paper Content
🚀 Synchronizing high-quality layout from 1TB storage...