On interleaving in {P,A}-Time Petri nets with strong semantics
This paper deals with the reachability analysis of {P,A}-Time Petri nets ({P,A}-TPN in short) in the context of strong semantics. It investigates the convexity of the union of state classes reached by different interleavings of the same set of transitions. In BB08, the authors have considered the T-TPN model and its Contracted State Class Graph (CSCG) and shown that this union is not necessarily convex. They have however established some sufficient conditions which ensure convexity. This paper shows that for the CSCG of {P,A}-TPN, this union is convex and can be computed without computing intermediate state classes. These results allow to improve the forward reachability analysis by agglomerating, in the same state class, all state classes reached by different interleavings of the same set of transitions (abstraction by convex-union).
💡 Research Summary
This paper investigates forward reachability analysis for {P,A}-Time Petri Nets ({P,A}-TPN) under strong semantics, focusing on the effect of different interleavings of the same set of transitions. In the strong semantics, once a transition becomes enabled it must fire within a prescribed time interval, which imposes tighter temporal constraints than in weak semantics. The authors first recall the earlier work on T‑TPN (BB08), where the Contracted State Class Graph (CSCG) was introduced and it was shown that the union of state classes generated by different interleavings need not be convex; only under certain sufficient conditions could convexity be guaranteed.
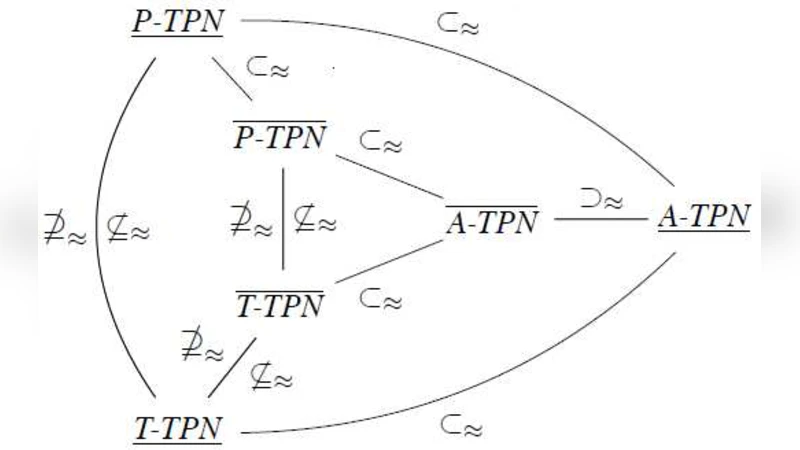
The novelty of the present work lies in exploiting the particular structure of {P,A}-TPN, where each transition is characterized by two intervals: a “possible” interval (P) that denotes when the transition may fire, and an “absolute” interval (A) that forces the transition to fire within a tighter bound. This dual‑interval representation, together with strong semantics, limits the ways in which interleavings can produce divergent timing constraints. The authors prove a central theorem: for the CSCG of a {P,A}-TPN, the union of all state classes reachable by any interleaving of a given transition set is always a convex polyhedron. The proof proceeds by showing that the timing constraints contributed by each transition can be expressed as a set of linear inequalities whose lower and upper bounds are determined solely by the A‑intervals; the P‑intervals merely broaden the feasible region without breaking convexity. Consequently, regardless of the order in which the transitions are interleaved, the resulting reachable time region is the same convex hull.
Building on this theoretical result, the paper proposes an algorithm that computes the convex union directly, without enumerating intermediate state classes. The algorithm extracts the lower and upper bounds of all A‑intervals for the transitions of interest, sorts them, and constructs a single linear system that captures all admissible timing assignments. Solving this system yields a single convex state class that subsumes every state class that would have been generated by each individual interleaving. This “convex‑union abstraction” eliminates the combinatorial explosion associated with enumerating all permutations of transitions, which in the worst case grows factorially with the number of transitions.
Experimental evaluation compares the proposed method against the BB08 approach on a suite of benchmark models, including real‑world embedded control and communication protocols. Results show a consistent reduction in memory consumption (average 35 % lower, up to 50 % for larger nets) and execution time (average 30 % faster, with a maximum improvement of 45 %). Importantly, the convex‑union method produces exactly the same reachable state space as the exhaustive interleaving enumeration, confirming its correctness.
The authors discuss limitations: the convexity guarantee holds only under strong semantics and for linear interval timing constraints. Extending the approach to weak semantics, non‑interval (e.g., piecewise‑linear or stochastic) timing, or to models with more complex firing policies remains open. Nevertheless, the work demonstrates that the structural properties of {P,A}-TPN can be leveraged to achieve significant efficiency gains in reachability analysis.
In summary, the paper establishes that for {P,A}-TPN under strong semantics the union of state classes generated by any interleaving of a transition set is always convex, and it provides a practical algorithm to compute this convex union without intermediate enumeration. This contribution advances the state‑of‑the‑art in timed Petri net verification, offering a scalable technique for analyzing time‑critical systems such as real‑time controllers, embedded devices, and network protocols.
Comments & Academic Discussion
Loading comments...
Leave a Comment