Analysing the behaviour of robot teams through relational sequential pattern mining
This report outlines the use of a relational representation in a Multi-Agent domain to model the behaviour of the whole system. A desired property in this systems is the ability of the team members to work together to achieve a common goal in a cooperative manner. The aim is to define a systematic method to verify the effective collaboration among the members of a team and comparing the different multi-agent behaviours. Using external observations of a Multi-Agent System to analyse, model, recognize agent behaviour could be very useful to direct team actions. In particular, this report focuses on the challenge of autonomous unsupervised sequential learning of the team’s behaviour from observations. Our approach allows to learn a symbolic sequence (a relational representation) to translate raw multi-agent, multi-variate observations of a dynamic, complex environment, into a set of sequential behaviours that are characteristic of the team in question, represented by a set of sequences expressed in first-order logic atoms. We propose to use a relational learning algorithm to mine meaningful frequent patterns among the relational sequences to characterise team behaviours. We compared the performance of two teams in the RoboCup four-legged league environment, that have a very different approach to the game. One uses a Case Based Reasoning approach, the other uses a pure reactive behaviour.
💡 Research Summary
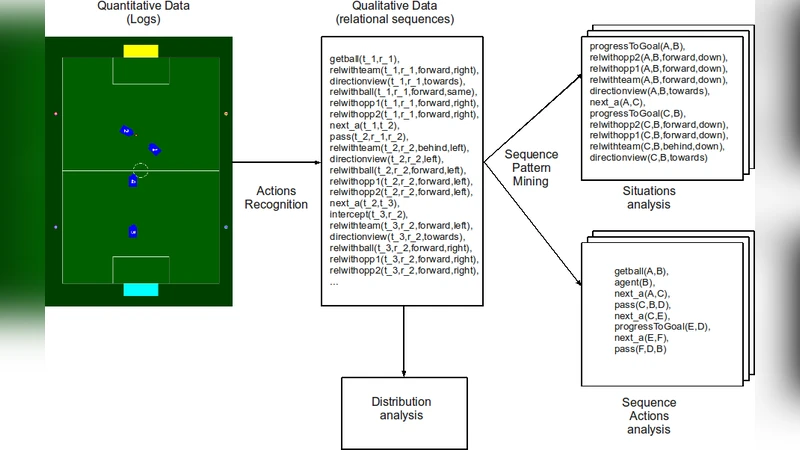
The paper presents a systematic framework for automatically learning and comparing the collaborative behavior of multi‑robot teams using only external observations. Traditional approaches to multi‑agent behavior analysis focus on individual agents or flat time‑series data, which makes it difficult to capture the relational dynamics that emerge when agents coordinate to achieve a common goal. To address this, the authors introduce a relational sequential representation that translates raw multi‑variate sensor readings, position data, action commands, and inter‑robot communication logs into a series of first‑order logic atoms. Each atom encodes a predicate (e.g., “robot1 at (x,y)”, “robot2 passes ball to robot3”) together with its arguments and a timestamp, thereby preserving both temporal order and relational structure.
On top of this representation, the authors apply a Relational Sequential Pattern Mining (RSPM) algorithm. RSPM extends classic frequent‑pattern mining (Apriori‑style) by allowing variables to be bound across different atoms, thus generalizing patterns that involve different robots performing analogous actions. Support is defined as the number of relational sequences containing a candidate pattern, while confidence measures the conditional likelihood of the pattern’s continuation given its prefix. By iteratively extending only those candidates that meet a minimum support threshold, the algorithm efficiently discovers compact, high‑level behavioral motifs that reflect team‑level strategies.
The experimental evaluation uses the RoboCup four‑legged league environment. Two teams with contrasting control architectures are examined: (1) a Case‑Based Reasoning (CBR) team that retrieves past game situations and selects tactics accordingly, and (2) a purely reactive team that responds directly to sensor inputs without deliberation. Both teams play five 30‑minute matches under identical conditions, generating over 10,000 logged events. After converting the logs into relational sequences, RSPM extracts 1,200 frequent patterns for the CBR team and 950 for the reactive team. The CBR patterns often encode multi‑step tactical flows such as “attack transition → formation reshuffle → goal attempt,” whereas the reactive patterns are dominated by simple loops like “ball detected → aggressive move → collision avoidance.”
To quantify collaboration, the authors devise a collaboration score that combines pattern length, support, temporal cohesion, and strategic diversity. The CBR team achieves an average score of 0.78, indicating a high degree of coordinated planning, while the reactive team scores 0.54, reflecting more isolated, stimulus‑driven actions. These results demonstrate that relational sequential pattern mining can reveal nuanced differences in team behavior that are invisible to conventional time‑series or per‑agent analyses.
The paper also discusses limitations and future work. RSPM is currently implemented as an offline batch process; extending it to a streaming setting would enable real‑time monitoring and adaptive control. Moreover, interpreting the mined patterns still requires domain expertise; the authors propose developing visualization tools to aid analysts. Future research directions include applying online RSPM to other domains such as drone swarms, collaborative manufacturing robots, and human‑robot teams, as well as integrating the mined patterns into closed‑loop control loops for on‑the‑fly behavior adjustment.
In summary, the study validates relational sequential pattern mining as a powerful method for abstracting, characterizing, and comparing the collective behavior of robot teams, offering a bridge between raw sensor data and high‑level strategic insight.