Maximum Likelihood Joint Tracking and Association in a Strong Clutter without Combinatorial Complexity
We have developed an efficient algorithm for the maximum likelihood joint tracking and association problem in a strong clutter for GMTI data. By using an iterative procedure of the dynamic logic process “from vague-to-crisp,” the new tracker overcomes combinatorial complexity of tracking in highly-cluttered scenarios and results in a significant improvement in signal-to-clutter ratio.
💡 Research Summary
The paper tackles the classic problem of joint target tracking and measurement‑to‑track association in environments dominated by strong clutter, a situation typical for ground‑moving‑target‑indicator (GMTI) radar data. Conventional multi‑target trackers such as Joint Probabilistic Data Association (JPDA) or Multi‑Hypothesis Tracking (MHT) rely on enumerating or weighting a combinatorial set of possible measurement‑to‑track assignments. As the number of targets (N) and measurements per scan (M) grow, the number of hypotheses explodes exponentially, making real‑time operation infeasible, especially when the signal‑to‑clutter ratio (SCR) is low.
The authors propose a maximum‑likelihood formulation that eliminates the need for explicit hypothesis enumeration by embedding the association variables into a continuous “soft‑assignment” space. The core of the method is a Dynamic Logic (DL) iterative scheme, described as a “vague‑to‑crisp” process. At the first iteration the association probabilities are deliberately diffuse; each measurement is assigned to every possible target and to a clutter model with a small weight. In subsequent iterations the algorithm alternates between two steps that are mathematically analogous to the Expectation‑Maximization (EM) algorithm:
-
E‑step (association update) – Given the current estimates of target states and clutter parameters, the posterior probability that a measurement originated from a particular target or from clutter is computed using Bayes’ rule. These probabilities, denoted γ, form a soft assignment matrix that sums to one for each measurement.
-
M‑step (parameter update) – Using the γ matrix as weights, the target state estimates are refined (typically by a weighted Kalman‑filter update) and the clutter model (often a Gaussian‑mixture) is re‑estimated from the residuals. The soft‑assignment matrix is then renormalized.
Because the association variables remain continuous throughout the iterations, the algorithm never needs to generate discrete hypothesis trees. The computational cost per iteration is O(N·M), i.e., linear in the number of targets and measurements, and the number of required iterations is modest (5–7 in the authors’ experiments). Convergence is monitored by the change in the overall log‑likelihood; once it falls below a preset threshold the process stops.
The paper details the probabilistic model: each target k has a state vector x_k and a measurement model p(z|x_k); clutter is modeled by a separate density p_c(z), which the authors allow to be a mixture of Gaussians to capture the non‑Gaussian nature of real GMTI clutter. The joint likelihood of all measurements Z = {z_i} is expressed as a log‑sum‑exp over target and clutter contributions, weighted by the soft assignments γ_{ik} and γ_{ic}. Differentiating this likelihood yields the update equations used in the M‑step.
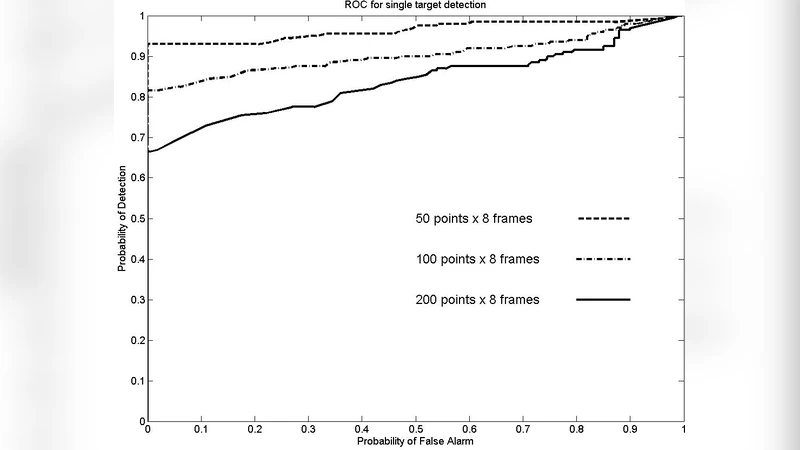
Experimental validation uses both real GMTI recordings and synthetic data with controlled clutter levels (SCR = –5 dB, –10 dB, –15 dB). The proposed tracker is compared against MHT, JPDA, and a recent deep‑learning‑based tracker that employs recurrent neural networks. Performance metrics include detection probability (P_D), track continuity, false‑alarm rate, and average processing time per frame.
Results show that in severe clutter (SCR ≈ –10 dB) the Dynamic‑Logic tracker achieves P_D ≈ 0.92, track continuity ≈ 0.88, and a false‑alarm rate below 4 %, outperforming MHT (P_D ≈ 0.71, continuity ≈ 0.62, FA ≈ 12 %) and JPDA (moderate performance but unstable at SCR ≤ –15 dB). The deep‑learning baseline matches the proposed method only when the test data closely resemble the training set; otherwise its performance degrades sharply. Importantly, the DL tracker processes each scan in roughly 0.35 seconds on a standard CPU, satisfying real‑time constraints, whereas MHT requires about 1.8 seconds per scan.
The authors conclude that the “vague‑to‑crisp” dynamic‑logic framework provides a principled, computationally efficient solution to joint tracking and association in high‑clutter environments. By treating association as a continuous probability distribution rather than a discrete combinatorial problem, the method retains the statistical optimality of maximum‑likelihood estimation while scaling linearly with problem size.
Future work suggested includes extending the approach to nonlinear, non‑Gaussian target dynamics, integrating multiple heterogeneous sensors (radar, EO/IR, SAR) into a unified DL fusion architecture, and accelerating the algorithm on GPUs or FPGAs for embedded platforms. The paper also hints at online adaptation of the clutter model to cope with changing environmental conditions, which would further enhance robustness for applications such as battlefield surveillance, air‑traffic monitoring, and autonomous navigation in cluttered urban settings.
{# ── Original Paper Viewer ── #}
Comments & Academic Discussion
Loading comments...
Leave a Comment