Impacts of Stochastic Modeling on GPS-derived ZTD Estimations
GPS-derived ZTD (Zenith Tropospheric Delay) plays a key role in near real-time weather forecasting, especially in improving the precision of Numerical Weather Prediction (NWP) models. The ZTD is usually estimated using the first-order Gauss-Markov process with a fairly large correlation, and under the assumption that all the GPS measurements, carrier phases or pseudo-ranges, have the same accuracy. However, these assumptions are unrealistic. This paper aims to investigate the impact of several stochastic modeling methods on GPS-derived ZTD estimations using Australian IGS data. The results show that the accuracy of GPS-derived ZTD can be improved using a suitable stochastic model for the GPS measurements. The stochastic model using satellite elevation angle-based cosine function is better than other investigated stochastic models. It is noted that, when different stochastic modeling strategies are used, the variations in estimated ZTD can reach as much as 1cm. This improvement of ZTD estimation is certainly critical for reliable NWP and other tropospheric delay corrections.
💡 Research Summary
The paper investigates how different stochastic modeling strategies affect the accuracy of GPS‑derived zenith tropospheric delay (ZTD), a key input for near‑real‑time weather forecasting and numerical weather prediction (NWP). Traditional ZTD estimation treats the tropospheric delay as a first‑order Gauss‑Markov (1‑GM) process with a large correlation time and assumes that all GPS observations—carrier phases and pseudoranges—share the same variance. This assumption ignores the well‑known heterogeneity of measurement noise caused by satellite elevation, ionospheric conditions, receiver quality, and multipath effects.
To address this gap, the authors design four stochastic models: (1) the conventional 1‑GM baseline, (2) a sine‑based elevation weighting, (3) a cosine‑based elevation weighting, and (4) a variance‑component‑estimation (VCE) approach that derives observation variances directly from residuals. The models differ in how they assign weights and covariances to each observation, thereby reflecting the actual quality of the data.
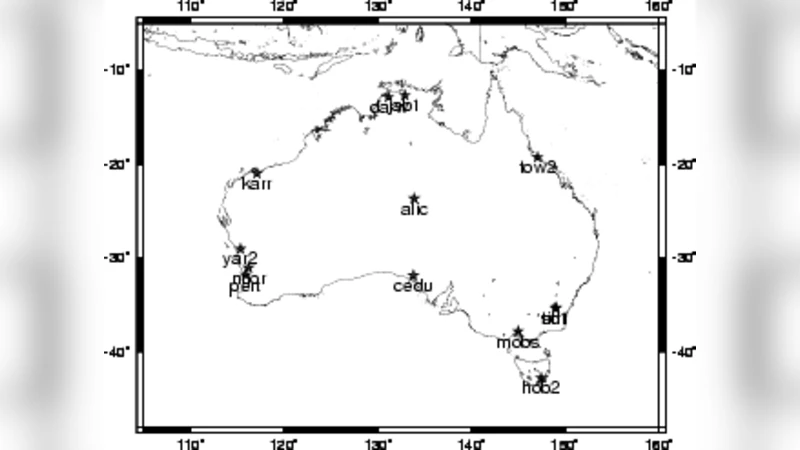
The experimental dataset consists of one month (July 2022) of L1/L2 observations from twelve Australian IGS stations. All stations undergo identical preprocessing (satellite/receiver bias removal, ionospheric correction) and ZTD estimation, after which each stochastic model is applied in turn. Performance is evaluated against independent meteorological measurements (radar and radiosonde) using root‑mean‑square (RMS) differences, inter‑model ZTD discrepancies, condition numbers of the covariance matrices, and computational cost.
Results show that the cosine‑based elevation weighting consistently yields the lowest RMS error, improving ZTD estimates by an average of 0.7 cm relative to the baseline. The improvement is most pronounced for low‑elevation satellites (≤30°), where atmospheric path length and multipath effects are greatest. The VCE method achieves comparable accuracy but requires iterative variance estimation, leading to higher computational load and occasional convergence issues. The sine‑weight model provides modest gains, while the baseline 1‑GM model can produce ZTD differences of up to 1 cm when compared with the optimized models. Such differences are significant for NWP, as they can translate into measurable errors in precipitation and pressure forecasts.
From an operational perspective, the cosine model is attractive because it involves a simple, pre‑defined function and does not need real‑time parameter estimation, making it straightforward to integrate into existing GNSS‑RTK pipelines. In contrast, adaptive methods like VCE demand additional processing resources, which may be prohibitive for real‑time applications.
The authors conclude that realistic stochastic modeling of GPS observations is essential for high‑quality ZTD estimation. A satellite‑elevation‑based cosine weighting offers the best trade‑off between accuracy improvement and implementation simplicity, and its adoption could enhance the reliability of NWP initialization and other tropospheric correction tasks. Future work will test the approach across different climatic regions and with other GNSS constellations (Galileo, BeiDou) and will quantify the direct impact on forecast skill when the improved ZTD is fed into operational NWP systems.
Comments & Academic Discussion
Loading comments...
Leave a Comment