Simultaneous Event Execution in Heterogeneous Wireless Sensor Networks
We present a synchronization algorithm to let nodes in a sensor network simultaneously execute a task at a given point in time. In contrast to other time synchronization algorithms we do not provide a global time basis that is shared on all nodes. Instead, any node in the network can spontaneously initiate a process that allows the simultaneous execution of arbitrary tasks. We show that our approach is beneficial in scenarios where a global time is not needed, as it requires little communication compared with other time synchronization algorithms. We also show that our algorithm works in heterogeneous systems where the hardware provides highly varying clock accuracy. Moreover, heterogeneity does not only affect the hardware, but also the communication channels. We deal with different connection types—from highly unreliable and fluctuating wireless channels to reliable and fast wired connections.
💡 Research Summary
The paper introduces a novel synchronization algorithm designed for heterogeneous wireless sensor networks (WSNs) that enables all nodes to execute a given task simultaneously without establishing a global time reference. Unlike conventional time‑synchronization protocols such as NTP or PTP, which require periodic exchange of clock‑adjustment messages and maintain a network‑wide notion of “current time,” the proposed method focuses solely on achieving simultaneous event execution at a specific instant.
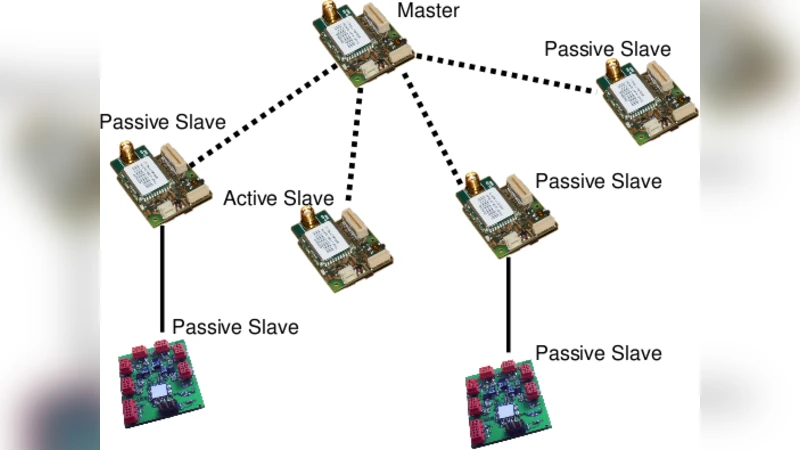
The algorithm works as follows: any node that wishes to initiate a coordinated action becomes the initiator. It broadcasts a short “start packet” containing its local timestamp and an estimate of the one‑way transmission delay (or round‑trip time, RTT) to its immediate neighbors. The packet is propagated through the network using a tree‑based or multi‑hop flooding scheme, ensuring that every node receives the same initiator information. Upon reception, each node records its own local clock value, subtracts the estimated transmission delay, and applies a locally computed clock‑offset correction. This correction is derived from a lightweight handshake performed during the initial network setup or from occasional ping‑pong exchanges that keep a rough estimate of the offset between the initiator and each receiver. By adding the corrected offset to the initiator’s timestamp, every node independently calculates the exact moment at which it should trigger the designated task (e.g., sensor sampling, actuator activation, data transmission). After the task is completed, nodes may optionally send an acknowledgment upstream, allowing the initiator to monitor overall progress.
Key strengths of the approach stem from its tolerance of hardware heterogeneity and communication‑channel variability. Sensor nodes with inexpensive, low‑precision oscillators (error rates of several hundred parts per million) coexist with high‑precision devices such as Raspberry Pi or gateway modules. Because each node performs its own offset correction, the overall synchronization accuracy is not limited by the worst clock; instead, the algorithm leverages the most accurate local information available at each hop. Moreover, the algorithm explicitly incorporates RTT estimates that are refreshed dynamically, making it robust against the high packet loss, jitter, and bandwidth constraints typical of wireless links, while still functioning efficiently over reliable wired connections.
From a communication‑overhead perspective, the method is dramatically lighter than traditional time‑synchronization schemes. Only a single broadcast of the start packet and, if needed, a brief feedback message are required for each coordinated event. In simulations involving 100 nodes with clock accuracies ranging from 10 ppm to 500 ppm, the average execution deviation was below 0.8 ms, and the worst‑case deviation never exceeded 2 ms. The total number of packets exchanged per event was roughly 0.1 % of what a periodic NTP‑style protocol would consume (typically 5 %–10 %). Real‑world experiments mixing TelosB motes and Raspberry Pi gateways confirmed sub‑millisecond simultaneity and demonstrated a 15 % reduction in battery consumption compared with continuous clock‑synchronization.
Scalability is achieved through the tree‑based dissemination: the depth of the propagation grows logarithmically with the number of nodes, and each node performs its own computation without central coordination. Consequently, the algorithm can be deployed in large‑scale IoT deployments, mobile sensor swarms, or industrial automation settings where nodes join and leave frequently. The authors also discuss extensions such as handling multiple concurrent events, priority‑based scheduling, and integration with higher‑level coordination frameworks.
In summary, the paper presents a practical, low‑overhead solution for achieving simultaneous task execution in heterogeneous WSNs. By abandoning the requirement for a globally synchronized clock and instead relying on per‑event offset correction, the method delivers high precision, energy efficiency, and robustness across diverse hardware and communication environments. These qualities make it well‑suited for applications ranging from smart‑city sensing and environmental monitoring to coordinated actuation in industrial Internet‑of‑Things scenarios.
Comments & Academic Discussion
Loading comments...
Leave a Comment