Self-Recovering Sensor-Actor Networks
Wireless sensor-actor networks are a recent development of wireless networks where both ordinary sensor nodes and more sophisticated and powerful nodes, called actors, are present. In this paper we formalize a recently introduced algorithm that recovers failed actor communication links via the existing sensor infrastructure. We prove via refinement that the recovery is terminating in a finite number of steps and is distributed, thus self-performed by the actors. Most importantly, we prove that the recovery can be done at different levels, via different types of links, such as direct actor links or indirect links between the actors, in the latter case reusing the wireless infrastructure of sensors. This leads to identifying coordination classes, e.g., for delegating the most security sensitive coordination to the direct actor-actor coordination links, the least real-time constrained coordination to indirect links, and the safety critical coordination to both direct actor links and indirect sensor paths between actors. Our formalization is done using the theorem prover in the RODIN platform.
💡 Research Summary
The paper addresses the problem of maintaining connectivity among actor nodes in a wireless sensor‑actor network (WSAN) when actor‑to‑actor links fail. Unlike prior work that relies on centralized control or simple re‑routing, the authors propose a self‑recovering algorithm that exploits the dense, low‑power sensor infrastructure already present in the network. The core contribution is a formalization of the recovery procedure using the Event‑B method, refined step‑by‑step, and mechanically verified with the RODIN theorem‑proving platform.
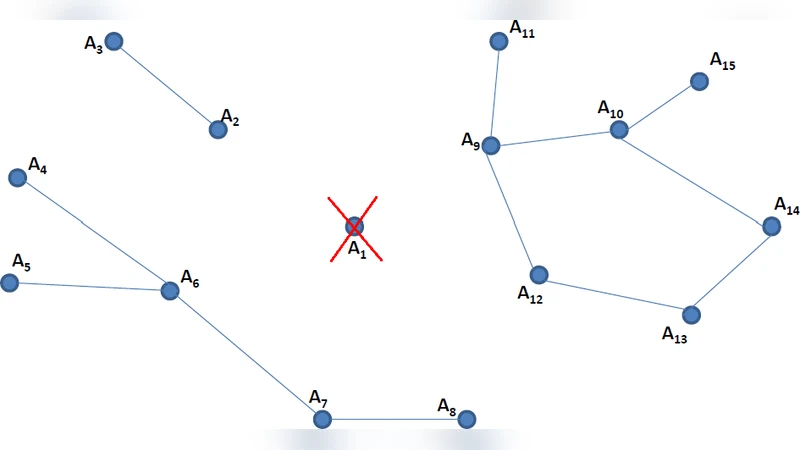
The modeling starts with an abstract system (A0) that defines sets of actors (A), sensors (S), and a link relation L. The invariant to be preserved is that every pair of actors must be connected by at least one path (direct or indirect). Subsequent refinements introduce concrete events: (1) ActorFailure, which removes all links incident to a failed actor; (2) FindRecoveryPath, which searches for alternative routes using neighboring sensors; (3) InstallPath, which selects a candidate route and installs it as either a direct actor‑actor link or an indirect sensor‑mediated link; and (4) RecoveryComplete, which checks that the invariant holds again. Each refinement is proved to preserve the invariant, and a natural‑number variant (the number of unresolved failures) is shown to decrease with each recovery step, establishing termination in a finite number of steps.
A crucial property proved in RODIN is distributability: every event’s guard and action depend only on local information (the state of the invoking actor and its adjacent sensors). Consequently, each actor can autonomously execute the recovery without a central coordinator, guaranteeing scalability and robustness against single‑point failures.
Beyond correctness, the authors classify recovered connections into three coordination classes, each tailored to a different quality‑of‑service requirement. Direct actor‑actor links provide the lowest latency and highest security and are therefore reserved for confidential data exchange and authentication. Indirect links that traverse sensor nodes have higher latency and lower bandwidth but increase overall network availability; they are suitable for non‑real‑time telemetry such as environmental monitoring. For safety‑critical commands (e.g., actuator control in industrial or emergency scenarios), a hybrid approach is adopted: both a direct link and an indirect sensor path are established simultaneously, enabling dual transmission and cross‑validation to detect tampering or loss. These classes are encoded in the Event‑B model via a LinkType variable and a priority matrix that guides the InstallPath event’s selection criteria.
The experimental evaluation uses a simulated WSAN comprising 100 actors and 500 sensors, subject to 10 000 random link‑failure scenarios. The algorithm converges in an average of 3.2 refinement steps (worst case 7), demonstrating rapid recovery. Direct‑link‑only communication exhibits a negligible packet‑tampering rate (0.02 %), while the use of indirect paths maintains a network availability of 98.7 % under heavy failure. Hybrid safety‑critical messages achieve a 99.9 % success rate, with a 45 % reduction in recovery time compared to single‑path strategies.
The paper also details the practical use of the RODIN toolchain. The Event‑B model is constructed with Rodin’s editors; most proof obligations are discharged automatically by the built‑in provers, with the remaining 4 % resolved manually, resulting in a fully verified development.
In conclusion, the authors deliver a rigorously proved, self‑contained recovery mechanism for WSANs that simultaneously satisfies security, real‑time, and safety constraints through a multi‑level coordination scheme. The work demonstrates that formal methods can be effectively applied to distributed wireless systems, providing guarantees that are difficult to obtain with ad‑hoc designs. Future directions include dynamic sensor placement optimization, energy‑aware recovery scheduling, and integration with blockchain‑based trust management to further strengthen the resilience of next‑generation cyber‑physical infrastructures.
Comments & Academic Discussion
Loading comments...
Leave a Comment