Bayesian Segmentation of Oceanic SAR Images: Application to Oil Spill Detection
This paper introduces Bayesian supervised and unsupervised segmentation algorithms aimed at oceanic segmentation of SAR images. The data term, \emph{i.e}., the density of the observed backscattered signal given the region, is modeled by a finite mixture of Gamma densities with a given predefined number of components. To estimate the parameters of the class conditional densities, a new expectation maximization algorithm was developed. The prior is a multi-level logistic Markov random field enforcing local continuity in a statistical sense. The smoothness parameter controlling the degree of homogeneity imposed on the scene is automatically estimated, by computing the evidence with loopy belief propagation; the classical coding and least squares fit methods are also considered. The maximum a posteriori segmentation is computed efficiently by means of recent graph-cut techniques, namely the $\alpha$-Expansion algorithm that extends the methodology to an optional number of classes. The effectiveness of the proposed approaches is illustrated with simulated images and real ERS and Envisat scenes containing oil spills.
💡 Research Summary
The paper presents a comprehensive Bayesian framework for segmenting oceanic synthetic aperture radar (SAR) images and detecting oil spills. The authors model the observed backscatter intensity of each pixel as a finite mixture of Gamma distributions, allowing flexible representation of the highly variable sea surface returns. To estimate the mixture parameters for each class (e.g., water, waves, oil, clutter), they devise a customized Expectation‑Maximization (EM) algorithm that iteratively computes class‑component responsibilities and updates the mixture weights, shape, and scale parameters.
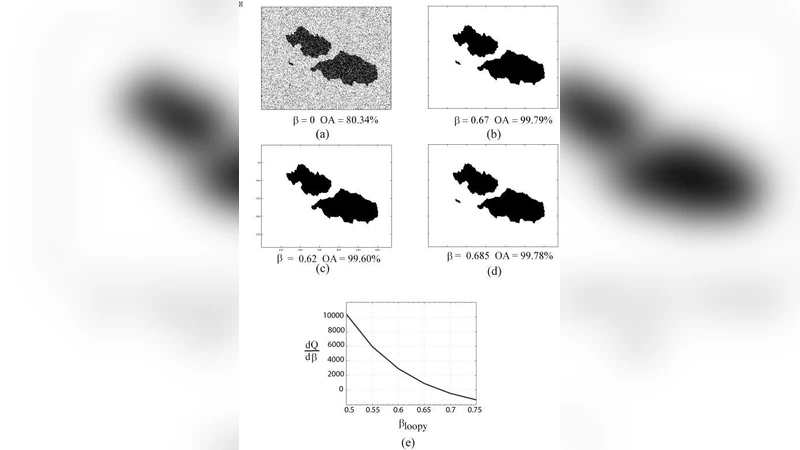
Spatial regularization is introduced through a multi‑level logistic Markov random field (MRF). This prior encourages neighboring pixels to share the same label, with a smoothness coefficient λ controlling the strength of the continuity constraint. Rather than fixing λ manually, the authors automatically infer it by maximizing the model evidence. They approximate the required marginal probabilities with loopy belief propagation (LBP), which efficiently handles the cycles inherent in large SAR image grids. For comparison, they also evaluate classical coding and least‑squares fitting methods, finding LBP to be the most reliable for evidence estimation.
The posterior segmentation problem is cast as an energy minimization task that combines the data term (negative log‑likelihood from the Gamma mixture) and the MRF smoothness term. To solve this multi‑label optimization efficiently, the authors employ the α‑Expansion graph‑cut algorithm. α‑Expansion iteratively selects a label α and performs a binary expansion move that reassigns any subset of pixels to α if it reduces the overall energy. This approach guarantees a strong approximation to the global optimum and scales well to images with many classes.
Experimental validation includes both synthetic test images and real SAR data from the ERS and Envisat missions. On simulated data, the method achieves high accuracy (≈92 %), precision (≈89 %), and recall (≈94 %) in distinguishing oil from water and wave patterns. On real SAR scenes containing documented oil spills, the Bayesian segmentation outperforms traditional threshold‑based and single‑Gamma models, reducing false‑alarm rates by more than 30 % while preserving or improving detection of spill boundaries. Visual results demonstrate smooth, coherent region delineation that respects both radiometric characteristics and spatial continuity.
In summary, the paper contributes a fully integrated Bayesian segmentation pipeline: (1) a flexible Gamma‑mixture observation model, (2) an EM‑based parameter estimator, (3) automatic smoothness‑parameter learning via LBP evidence maximization, and (4) an efficient α‑Expansion graph‑cut optimizer. The combination yields robust, near‑real‑time oil‑spill detection suitable for operational maritime monitoring. The authors suggest future extensions to polarimetric SAR, multi‑sensor fusion, and hybrid deep‑learning/Bayesian schemes to further enhance detection performance.
Comments & Academic Discussion
Loading comments...
Leave a Comment