Applying Constraint Solving to the Management of Distributed Applications
We present our approach for deploying and managing distributed component-based applications. A Desired State Description (DSD), written in a high-level declarative language, specifies requirements for a distributed application. Our infrastructure accepts a DSD as input, and from it automatically configures and deploys the distributed application. Subsequent violations of the original requirements are detected and, where possible, automatically rectified by reconfiguration and redeployment of the necessary application components. A constraint solving tool is used to plan deployments that meet the application requirements.
💡 Research Summary
The paper introduces a novel framework for the automatic deployment and ongoing management of distributed component‑based applications. Central to the approach is the Desired State Description (DSD), a high‑level, declarative specification written in a purpose‑built language called Deladas. A DSD captures the administrator’s intent by describing available hardware and software resources, the components to be deployed, their required and provided interfaces, and a set of constraints that may involve component topology, placement on hosts, version compatibility, and resource usage.
Deladas provides five core constructs: interfaces (defining service contracts via URIs), component types (linking implementations to interfaces and declaring required/provided services), templates (allowing reusable architectural patterns and property definitions), hosts (describing physical machines with static and dynamic attributes), and constraint sets (expressed with universal and existential quantifiers, binary relations, and property expressions). The language is deliberately lightweight yet expressive enough to model common architectural styles and regulatory policies.
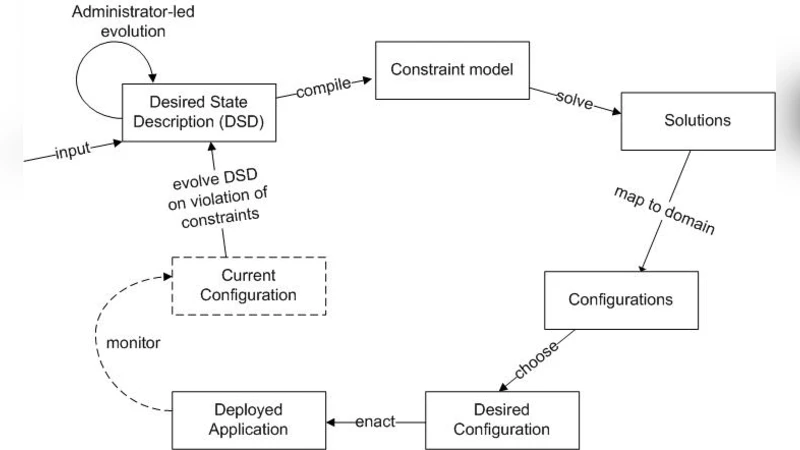
When a DSD is supplied, the system compiles it into a domain‑neutral Constraint Satisfaction Problem (CSP). Variables represent component instances, host assignments, and inter‑component links; each variable’s domain consists of feasible options derived from the DSD. Constraints encode all declared requirements, turning the deployment problem into a classic CSP. A generic CSP solver then searches for value assignments that satisfy every constraint. Each feasible solution is mapped back into a Configuration Description Document (CDD), which details a concrete mapping of components to hosts and the wiring of their interfaces.
The most suitable CDD is selected for enactment. Deployment proceeds by generating XML‑encoded bundles that contain the component code, configuration data, automatically generated probes, and remote management interfaces. These bundles are dispatched to the appropriate hosts, where they are instantiated. At runtime, the probes continuously update a centrally‑conceptualized model of the current system configuration. This model is periodically compared against the original DSD. If any constraint violation is detected—due to host failures, network partitions, overload, or intentional upgrades—the DSD is evolved to reflect the new resource landscape, re‑compiled into a CSP, and a new deployment plan is produced. Thus the framework supports self‑healing, scaling, and evolutionary changes without manual intervention.
The authors position their work against related efforts such as Acme, SmartFrog, and model‑driven CORBA systems. While Acme focuses on architectural description without deployment support, and SmartFrog relies on a consensus algorithm to maintain global constraints, the presented approach leverages CSP solving to achieve efficient global constraint satisfaction and automatic re‑configuration. Moreover, the explicit modeling of physical resource constraints distinguishes it from many prior systems.
A concrete example—a Math service composed of a main service component that requires multiplication and addition services—is used to illustrate the Deladas syntax, the compilation to CSP, and the generation of bundles. The prototype implementation, the Deladas Runtime, is Java‑centric and demonstrates the feasibility of the approach, though the paper acknowledges limitations in scalability of the CSP solver and the current focus on Java components. Future work is suggested in integrating multiple solvers, extending the language to non‑Java environments, incorporating policy‑driven optimization objectives, and improving the responsiveness of re‑deployment for latency‑sensitive applications.
Overall, the paper contributes a clear, declarative model for specifying desired system states, a systematic translation to constraint solving, and an end‑to‑end runtime that can automatically deploy, monitor, and adapt distributed applications in response to both failures and intentional evolution.
Comments & Academic Discussion
Loading comments...
Leave a Comment