Computation of Time-Periodic Solutions of the Benjamin-Ono Equation
We present a spectrally accurate numerical method for finding non-trivial time-periodic solutions of non-linear partial differential equations. The method is based on minimizing a functional (of the initial condition and the period) that is positive …
Authors: David M. Ambrose, Jon Wilkening
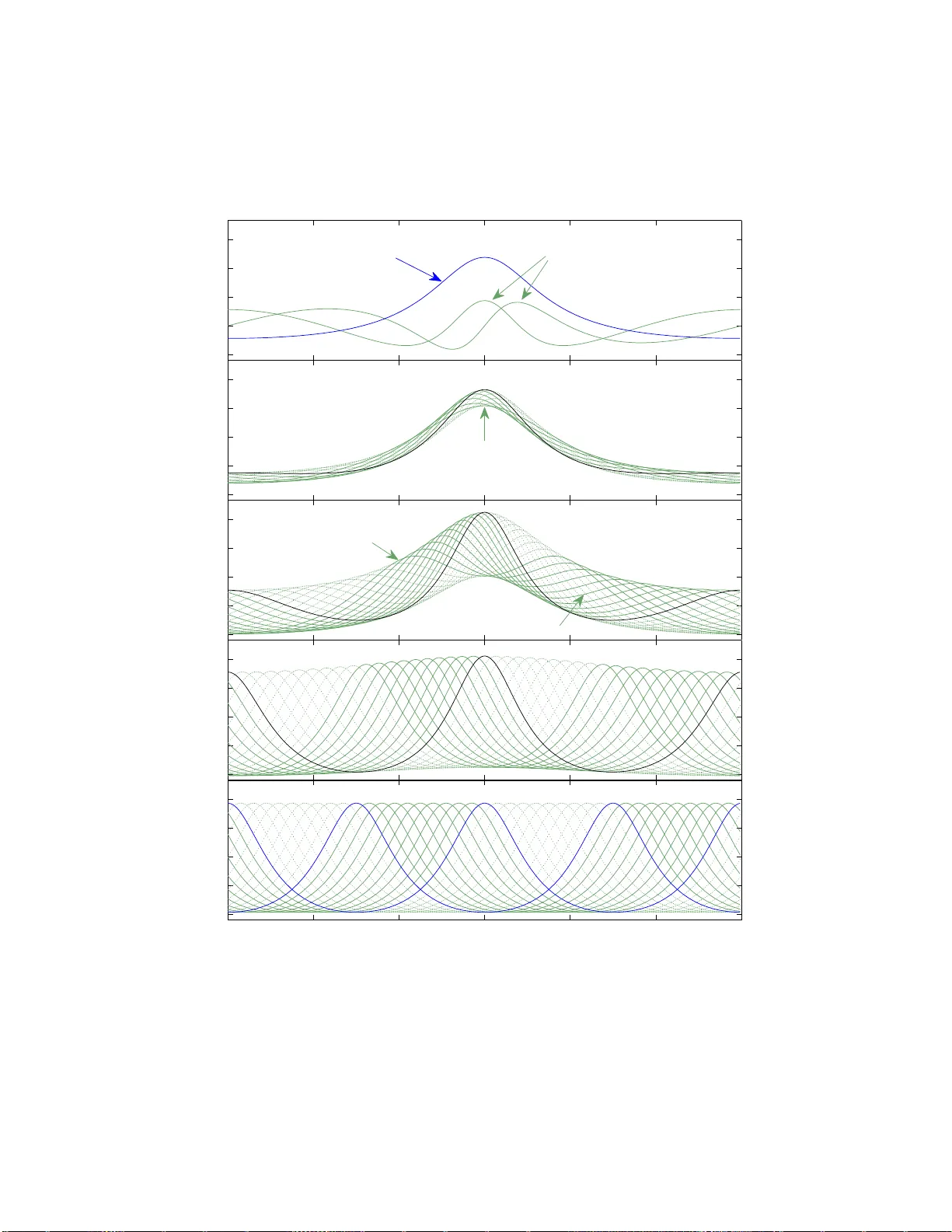
Computation of Time-P erio dic Solutions of the Benjamin-Ono Equati on Da vid M. Am brose ∗ Jon Wilk ening † July 2, 2009 Abstract W e present a spectrally acc ur ate n umerical metho d for finding non-tr ivial time- per io dic solutions of non-linear partial differential equations. The metho d is based on minim izing a functional (of the initial condition and the p erio d) that is p ositive unless the solution is p erio dic, in whic h cas e it is zero. W e solve a n adjoint PDE to compute the gradient of this functional with resp ect to the initial condition. W e include additional terms in the functional to specify the free parameters, which, in the case of the Benjamin-Ono equation, are the mean, a spatial phase, a tempo ral phase and the real part of one of the F ourier mo des at t = 0. W e use our method to study global paths of non-trivial time-pe r io dic solutions co n- necting stationar y and tr av eling w av es of the Benjamin-Ono equation. As a starting guess for each path, we compute p erio dic solutions of the linearized problem by solving an infinite dimensio na l eigenv a lue problem in closed form. W e then use o ur numerical metho d to contin ue these s olutions beyond the realm of linear theory un til another trav- eling wa ve is rea ched. By exp er iment atio n with data fitting, we iden tify the analytical form of the solutio ns on the pa th connecting the one- hu mp statio na ry solution to the t wo-hum p trav eling wav e. W e then derive exact for mu las for these solutions b y explic- itly solv ing the sy s tem of ODEs gov erning the evolution of solitons using the ansa tz suggested by the num eric al simulations. Key w ords. P erio dic solutions, Benjamin-Ono equation, non-linear wa v es, solitons, bifurcation, con tin uation, op timal cont rol, adjoin t equation, sp ectral metho d AMS sub ject classifications. 65 K10, 37M20, 35Q53, 37G15 1 In tro duction A fund amen tal problem in the theory of ordinary and partial differen tial equations is to determine whether the equation p ossesses time-p erio dic solutions. F amous examples of ∗ Department of Mathematical Sciences, Clemso n Universit y , Clemson, SC 29634. Current address: De- partment of Mathematics, Drexel Universit y , Philadelphia, P A 19104 ( ambrose@ math.drexel.edu ). This w ork was supp orted in p art by the National Science F oun dation through grant DMS-0926378. † Department of Mathematics and La wrence Berkeley National Laboratory , Univer sity of California , Berke ley , CA 94720 ( wilken@m ath.berkeley.edu ). This work was supp orted in p art by the Director, Of- fice of Science, Computational and T echnology Research, U.S . Department of Energy u nder Contract N o. DE-AC02-05 CH11231. 1 2 Da vid M. Am brose and Jon Wilk ening ordinary differen tial equ ations with p er io dic solutions in clude the Brusselator [FB85, Gov0 0 , Str00] and the three-b o dy p r oblem [Are63, HNW00]. I n partial differenti al equ ations, time- p erio d ic solutions can b e “trivial” stationary or tra ve ling w a ve s, or can b e gen uinely time- p erio d ic. Suc h a problem can b e studied in either the forced or unf orced context . F o rced problems include an external force in the PDE that is time-p erio d ic; solutions with th e same p erio d are then sought . In the unforced problem, the p erio d is one of the unknowns. In this work, w e p resen t a n umerical metho d for finding gen uinely time-p erio d ic solutions of the un f orced Benjamin-Ono equation with p erio dic b oundary conditions. Th ese solutions ha v e m an y remark able p r op erties, whic h w e will describ e. Our w ork is motiv ated by the calculati ons of Hou, Lo we ngru b, and Shelley for the v ortex sheet with su rface tension [HLS94, HLS97], and b y the analysis of Plotnik o v, T oland and Io oss [PT01, IPT05] for th e w ater w a ve. Hou, Lo w engrub, and Shelley dev elop ed an efficien t n umerical metho d to solv e the initial v alue pr oblem f or the v ortex sheet with surf ace tension. They p erf ormed calcula tions for a v ariet y of initial conditions and v alues of the surface tension parameter, an d fou n d many situations in whic h the solutions app ear to b e close to time-p erio dic. They did not, ho w ev er, try to m easur e th e deviation from time-p erio dicit y or attempt to v ary the initial conditions to redu ce this d eviation. Plotnik o v, T oland, and Io oss ha v e pro v ed the existence of time-p erio dic wa ter wa ves, without surface tension, in the case of either finite or infinite depth. This is p ro v ed us ing a ve rsion of the Nash-Moser implicit function theorem. Their work includes no computation of the wate r wa v es. W e aim to get a fir m er handle on these solutions with an explicit calculation. T o this end, in the present work, w e dev elop a general numerical metho d for fi nding time-p er io dic solutions of nonlinear systems of p artial different ial equations and ev en tually plan to use this metho d for the v ortex sh eet and w ater w a ve problems. In f act, during the review pro cess of the present w ork, we ha v e succeeded in computing seve ral families of time-p erio d ic solutions of the v ortex sheet with surface tension [A W09]. The Benjamin-Ono equation, deve lop ed in [Ben67, D A67, On o75], is a mo del equation for the ev olution of w a ve s on deep wa ter. It is a widely-studied disp ersive equation, and m uch is kno wn ab out solutions. It w ould b e imp ossib le to mentio n all results on Benjamin- Ono, but we mentio n, for example, that weak solutions exist f or u 0 ∈ L 2 [Sau79, GV91], and that the solution exists for all time if u 0 ∈ H 1 [T ao04]. W e c hose th e Benjamin-Ono equation as a fir st application for our numerical m etho d b ecause it is m uc h less exp ensiv e to evolv e than the vortex sheet or wa ter wa v e, ye t has m an y features in common with them, suc h as non -lo calit y (due to the Hilb ert transform in the former case and the Birkhoff-Rott in tegral in the latte r t w o cases.) In our n umerical simulatio ns, w e fin d that the Benjamin- Ono equation has a r ic h family of non-trivial time-p erio dic solutions that act as rungs in a ladd er connecting tra v eling wa ves with different sp eeds and w a ve lengths b y creati ng or annihilating oscillatory humps that gro w or shrink in amplitude until they b ecome part of the statio nary or tra v eling wa v e on the other side of the rung. T he dyn amics of these n on- trivial solutions are often v ery in teresting, sometimes r esem bling a lo w amplitude trav eling w a ve su p erimp osed on a larger carrier signal, and other times lo oking lik e a col lection of in teracting solitons that pass through eac h other or b ounce off eac h other, dep endin g on their relativ e amplitudes. By fitting ou r n umerical data, we ha v e d etermined that all the solutions w e ha ve com- Time-P erio dic Solutions of the Benjamin-Ono Equation 3 puted are sp ecial cases of the multi-phase solutions studied by C ase [Cas79], Satsuma an d Ishimori [SI 79], Dobrokhoto v and Kr ic hev er [DK91], and Matsuno [Mat04], but with sp ecial initial conditions (that yield p erio dic orb its) and a mo dified m ean (to c hange their sp eeds and allo w bifurcations to o ccur b etw een different lev els of the hierarc h y of m ulti-phase so- lutions). W e d id not take adv an tage of this structure when we deve lop ed our numerical metho d; hence, our appr oac h can also b e u sed for non-int egrable problems. W e also n ote that bifu rcation within the family of m ulti-phase s olutions h as not previously b een dis- cussed in the literature, nor has the remark able dynamics of the F ourier co efficien ts of th ese solutions b eyo nd the original deriv ation by Benjamin [Ben67] of the form of the trav eling w a ve s for th is equation. W e are a wa re of v ery few works on the existence of time-p erio dic solutions for w ater w a ve mo del equations. Crannell has demonstrated [Cra96] the existence of p erio dic, non- tra v eling, w eak solutions of the Boussin esq equation u sing a generalization of the mountain pass lemma of Rabino witz. Chen and Io oss h av e pro ve d existence of time-p erio dic solutions in a t w o-w a y Boussinesq-t yp e water w a ve mo del [CI05]. As in [PT01] and [IPT05], there is no computation of the solution in either of th ese stud ies. Cabral and Rosa ha v e recen tly disco v ered a p erio d-doubling cascade of p erio dic solutions for a damp ed and forced v ersion of the Kortew eg–de V ries equation [CR04]. T hey use a F ourier pseudosp ectral metho d f or the s patial discretization and a first ord er semi-implicit sc heme in time. T o find p erio dic solutions, th ey u se a s ecant metho d on a numerical Po incar´ e map. Whereas our approac h is based on minimizing a functional that measures d eviation from p erio dicit y , they r ely on the stabilit y of the orbit to con ve rge to a p erio dic solution. They stop when they find a solution th at returns to within one p ercen t of its initial state, wh ereas we resolv e our p erio d ic solutions to 13-15 digits of accuracy , whic h allo ws us to stud y the analytic form of the solutions. W ate r wa v es aside, many authors hav e inv estigate d time-p erio dic solutions of other par- tial differenti al equations b oth numericall y and analytical ly . F or instance, Smiley pro ve s existence of time-p erio dic solutions of a n onlinear wa v e equation on an unbou n ded domain [Smi89]; he also dev elops a numerical metho d for the same problem [Smi90]. On a finite do- main, Brezis u ses du alit y principles to p ro v e the existence of p erio dic s olutions of nonlinear vibrating strings in b oth the forced and u nforced setting; see [Bre83 ]. Ma whin has wr itten a survey article on p erio dic s olutions of semilinear wa v e equations [Ma w95], wh ic h includes man y references. P ao h as dev elop ed a n umer ical metho d for the solution of time-p erio dic parab olic b oundary-v alue pr oblems [Pao0 1 ]. P ao gives v arious iterativ e schemes, but un lik e the pr esent w ork, these are not based on v ariational principles or the d ual system. Bro wn et. al. [BKOR92] ha v e used the p opu lar soft w are p ac k ag e A UTO [DKK 91a ] to s tu dy Hopf bifurcation and loss of stability for tra v eling wa v es of the r egularized Kur amoto-Siv ashinsky equation. T hey observ e mo du lated tra vel ing w av es similar to m any of the solutions w e hav e found for Benjamin-On o. And of cours e, time-p erio dic solutions of systems of ordinary differen tial equations hav e also b een w idely studied, e.g. in [Rab78, Rab82, Zeh83, Dui84]. The most p opular metho ds for the numerical solution of b ou n dary v alue problems go v- erned by O DEs, which includ e find ing time-p er io dic s olutions as a sp ecial case, are orthog- onal collocation metho d s [DKK91b] and shooting/multi -sho oting metho ds [SB02]. These metho ds can also b e used for PDEs via th e metho d of lin es, i.e. by discretizing space first to 4 Da vid M. Am brose and Jon Wilk ening obtain an ODE. Orthogonal collo cation metho ds (su ch as implemen ted in A UTO) require a nonlinear system of equations to b e solv ed inv olving all th e d egrees of fr eedom at ev ery timestep. In man y of our sim ulations, the solution at ev ery timestep cannot ev en b e stored sim ultaneously in memory; hence, it would b e imp ossib le to solv e a s ystem of equations for all these v ariables. F or PDEs, sho oting metho ds are also v ery exp ensiv e as the Jacobian of the fun ctional measurin g errors in the b oun dary conditions must b e compu ted with resp ect to v ariation of th e N “unknown” initial conditions, wh ic h is N times more exp ens iv e than computing the functional itself. Lust and Ro ose [LR96] prop ose an int eresting solution to this problem in wh ic h a sho ot- ing metho d is used for some of the degrees of freedom while iteration on a Poinca r´ e map is used for the other degrees of f reedom. They aim to exp loit the fact that man y high dimensional systems actually exhibit lo w-dimensional dynamical b ehavior. In the pr esent w ork, we offer an alternativ e strategy based on the follo wing idea: while the Jacobian of the residual measuring error in eac h of the b ound ary conditions is exp ensive to compute, the gradien t of the sum of squ ares of this residual can b e computed b y solving a single adjoint PDE. Although the full Jacobian giv es more inf ormation, it is N times more exp ensiv e to compute. W e find that it is more efficien t to use a quasi-Newton metho d with only the gradien t information than it is to use a f u ll Newton m etho d with the Jacobian. Th is ap- proac h is not r estricted to fin d ing time-perio d ic solutions; it will work for an y b oundary v alue problem. Also, although w e h a v e not tried it, our metho d can b e easily adapted to incorp orate the idea b ehind multi- sho oting metho d s, n amely that by in tro d ucing “in terior” initial conditions and b oundary cond itions, we can a vo id a great d eal of the ill conditioning due to nearb y tra jectories div erging exp onen tially in time. The closest numerical metho d to our o wn that w e hav e found is due to Bristeau, Glo win- ski and P ´ eriaux [BGP98], who dev elop ed a least squ ares sho oting metho d for numerical computation of time-p erio dic solutio ns of lin ear dy n amical systems w ith applicat ions in scattering phenomena in t wo an d thr ee d imensions; see also [GR06]. These authors employ metho ds of control theory to compute v ariatio nal deriv ativ es, and although th ey only apply their metho ds to linear problems, they mentio n that their techniques will also w ork on n on- linear pr ob lems. Our metho d can b e consid ered an extension of th eir approac h that fo cus es on the difficulties that arise du e to non-linearity . In particular, w e replace their conju gate gradien t solv er with a black- b o x minimization algorithm, (the BF GS metho d [NW99 ]), and include an additional p enalt y function to prescrib e the v alues of the free p arameters that describ e the manifold of non-trivial time-p erio dic solutions. Without this p enalty function, the basic m etho d is only found to p r o duce constan t solutions and tra v eling wa v es. This pap er is organized as follo ws: In Section 2 , w e discuss spatially p erio d ic stationary and trav eling solutions of the Benjamin-Ono equation, the bifurcations from constan t so- lutions to tra v eling wa v es, and the p ole d ynamics of meromorphic solutions. In Section 3, w e inv estigat e time-p erio d ic solutions of th e linearized Benjamin-Ono equation; this is the linearizatio n ab out the statio nary s olutions d iscussed previously . T o analyze the linearized problem, we compute (n umerically) the sp ectrum and eigenfunctions of the relev ant linear op erator and deduce their analytic form by trial and er r or; the resulting form ulas can b e v erified rigorously (but w e omit details). In Section 4, we describ e our n umerical metho d, wh ic h inv olv es minimizing a non- Time-P erio dic Solutions of the Benjamin-Ono Equation 5 negativ e functional that is zero if and only if the solution is p erio d ic. W e solv e an adjoin t PDE to compute th e v ariational deriv ati ve of this f unctional with resp ect to p erturb ation of the initial condition and use the BF GS minimization algorithm to min imize the functional. The Benjamin-Ono and adjoint equations are solv ed with a pseu do-sp ectral collocation metho d u sing a fourth ord er, semi-implicit Runge-Kutta scheme. W e use a p enalt y function to rule out constan t solutions and tra vel ing w a ves, and to pr escrib e the free parameters of the m anifold of non-trivial solutions. W e then v ary a bifur cation parameter to study the global prop erties of these non-trivial solutions. In the presen t work, we apply this metho d only to the Benjamin-Ono equation, but we are confident th at this m etho d is applicable to virtually any system of partial differential equations that p ossesses time-p erio d ic solutions. In Section 5, w e use our metho d to study the global b eha vior of non-trivial time-p erio dic solutions far b ey ond the r ealm of v alidit y of the linearization ab out stationary and tra v eling w a ve s. W e will follo w one suc h path to disco ve r that the one-hump stationary solution is connected to the t w o-h ump tra vel ing wa v e b y a path of non-trivial time p erio dic solutions. In Section 6, we re-form ulate the ODE go v ernin g the evolutio n of p oles to r ev eal an exact form ula for the s olutions on the path studied n umer ically in S ection 5. Th us, unexp ectedly , w e ha ve pro v ed that non-trivial time-p erio dic solutions bifurcate from stationary solutions b y exhibiting a f amily of them explicitly . In a follo w-up pap er [A W], we w ill classify all bifurcations from tra v eling wa v es, s tudy the paths of non-trivial s olutions connecting sev eral of them, prop ose a conjecture exp laining how they all fi t together, and describ e their analytic form to the exten t that we are ab le. W e en d w ith a few concluding remarks in Section 7. 2 Stationary , T ra v eling and Soliton Solutions W e consider the spatially p erio dic Benjamin-Ono equation with the follo wing sign conv en- tion: u t = H u xx − uu x . (1) Of course, th e op erator H is the Hilb ert transform. Recall that th e sym b ol of H is ˆ H ( k ) = − i sgn( k ) . Man y authors includ e a factor of t w o in the conv ect ion term and place a min us sign in f ron t of H . The former change causes solutions to b e scaled by a factor of 1 / 2 while the latt er change has no effect as H is defined w ith the opp osite sign with this conv en tion. This equation p ossesses a t w o-parameter family of stationary solutions, namely u ( x ) = 1 − 3 β 2 1 − β 2 + 4 β [cos ( x − θ ) − β ] 1 + β 2 − 2 β cos( x − θ ) , ( − 1 < β < 1 , θ ∈ R ) . (2) These solutions ha v e mean α , related to β via α ( β ) = 1 − 3 | β | 2 1 − | β | 2 , | β | 2 = 1 − α 3 − α . (3) Changing the sign of β is equ iv al ent to the ph ase shif t θ → θ − π . It is conv enien t to complexify β and define u β to b e the mean-zero part of (2) with β → | β | , θ → arg ¯ β : stationary solution = α ( β ) + u β ( x ) , β = | β | e − iθ ∈ ∆ = { z ∈ C : | z | < 1 } . (4) 6 Da vid M. Am brose and Jon Wilk ening 0 −2 0 2 4 6 8 π 2 π Stationary Solutions x u α = 1 α = −0.8225 α = 0.544375 α k = 1 − (3k/40) 2 , k=0..18 Figure 1: Stationary solutions of th e Benjamin-Ono equation. Note that the subscript β do es n ot indicate a d eriv at ive here. Several stationary solutions with β real and negativ e are s h o wn in Figure 1 . The F ourier represen tation of u β is simply ˆ u β ,k = 2 ¯ β | k | , k < 0 0 , k = 0 2 β k , k > 0 , (5) where ¯ β is the complex conjugate of β . These functions u β ( x ) are the building blo c ks for the meromorphic solutions discussed b elo w. Note th at the constan t s olution u ≡ α 0 is also a stationary solution, as are the re-scaled solutions u N ,β ( x ) = N α ( β ) + N u β ( N x ) , ( β ∈ ∆ , N = 1 , 2 , 3 , . . . ) , whic h ha v e mean α 0 = N α ( β ). If we restrict atten tion to stationary solutions with even symmetry (i.e. with β real), w e fin d that there is a p itc hfork b ifurcation at eac h p ositiv e in teger (using the mean as a bifu rcation p arameter). As α 0 c hanges from N + to N − , the constan t solution splits, yielding tw o additional ( N -hump stationary) solutions, namely u N ,β ( x ) with β = 0 ± . The pitc hfork w ould b e obtained by plotting the r eal part of the N th F ourier mo de v ersus the mean, wh ere we observ e that the F ourier represen tation of u = u N ,β (for an y β ∈ ∆) is giv en by ˆ u k = N α ( β ) , k = 0 , 2 N β k / N , k ∈ N Z , k > 0 , 2 N ¯ β | k | / N , k ∈ N Z , k < 0 , 0 otherwise. (6) Time-P erio dic Solutions of the Benjamin-Ono Equation 7 If we do not restrict atten tion to ev en solutions, the ph ase shift θ acts as a second parameter connecting the t w o outer bran ches of the pitc hfork into a t wo- dimen sional, b o wl-shap ed sheet (plotting the real and imaginary parts of the N th F ourier mo de v ersus the mean). In the b ifurcation p roblem j ust describ ed, we v aried the mean α 0 and foun d bifu rcations from constan t solutions to stati onary solutions at the p ositiv e integ ers. Th e r emainder of this pap er deals with bifur cation f rom these stationary solutions to non-trivial time-p erio d ic solutions and their global conti nuation b ey ond the realm of linear theory . Rather than v arying the mean, w e will hold α 0 ∈ R constan t and use another quan tit y (su c h as the p erio d T or the real part of one of the F our ier mo des of u at t = 0) as the bifurcation parameter. As a first step, let us consid er bifu rcation from constan t solutions to tra v eling w a ve s holding α 0 ∈ R constan t and v arying T . All tra v eling wa v e solutions of the Benjamin-On o equation can b e foun d b y applying a simp le tr an s formation to a stationary solution, and vice versa. Indeed, if u ( x, t ) is an y solution of (1 ), then U ( x, t ) = u ( x − ct, t ) + c (7) is also a solution; th us, add ing a constan t c to a stationary solution causes it to tra v el to the righ t with sp eed c . W e can parametrize these N -hump tra ve ling w a v es by th eir mean α 0 ∈ R and deca y/phase parameter β ∈ ∆: u α 0 ,N ,β ( x, t ) = u N ,β ( x − ct ) + c, c = α 0 − N α ( β ) . (8) If we exp r ess the p erio d T = 2 π / ( N | c | ) in terms of β and solv e for β , w e find that w e can bifurcate f rom any constant solution u ≡ α 0 to an N -hump tra vel ing solution with the same mean. If α 0 < N , a pitc hfork fr om the constan t solution o ccurs at T 0 = 2 π / [ N ( N − α 0 )]; as we increase T from T 0 to ∞ , α = [2 π / ( N T ) + α 0 ] / N decrease s from 1 to α 0 / N and | β | v aries from 0 to p (1 − α 0 / N ) / (3 − α 0 / N ) . Similarly , if α 0 > N , a pitchfork o ccurs at T 0 = 2 π / [ N ( α 0 − N )]; as w e de cr e a se T from T 0 to 0, α = [ α 0 − 2 π / ( N T )] / N decreases from 1 to −∞ , and | β | v a ries from 0 to 1. An d if α 0 = N , the situation is qualitativ ely similar to the latter case, but the pitc hfork occurs at T 0 = ∞ , i.e. all thr ee solutions (with β r eal) exist for any p erio d T > 0. W e remark that if the tra v eling w a v es describ ed ab ov e ha v e zero mean, they are a sp ecial case of the meromorp hic N -particle “p erio dic solito n” solutions describ ed in [Cas78], namely u ( x, t ) = 2 Re ( N X l =1 2 e i [ x + t − x l ( t )] − 1 ) , where Im { x l (0) } > 0 and the x l ( t ) satisfy th e sy s tem of d ifferen tial equations dx l dt = N X m =1 m 6 = l 2 e − i ( x m − x l ) − 1 + N X m =1 2 e − i ( x l − ¯ x m ) − 1 , (1 ≤ l ≤ N ) . (9) In our notation, we w rite x l ( t ) = i log β l ( t ) = θ l ( t ) − i log | β l ( t ) | , ( β l = | β l | e − iθ l = e − i ¯ x l ) 8 Da vid M. Am brose and Jon Wilk ening and generalize to the case that the mean α 0 can b e non-zero. W e fi n d from (9) and (7) that u ( x, t ) = α 0 + N X l =1 u β l ( t ) ( x ) (10) is a s olution of (1) if the v ariables β l ∈ ∆ satisfy ˙ β l = N X m =1 m 6 = l − 2 iβ 2 l β l − β m + N X m =1 2 iβ 2 l β l − ¯ β − 1 m + i (2 N − 1 − α 0 ) β l , (1 ≤ l ≤ N ) . (11) The N -h ump tra v eling w a v e th en has th e r epresen tation u α 0 ,N ,β ( x, t ) = α 0 + N X l =1 u β l ( t ) ( x ) , β l ( t ) = N p β e − ict , c = α 0 − N α ( β ) , where eac h β l is assigned a distinct N th ro ot of β . As we are in terested in dev eloping n umerical metho ds th at generalize to more complicat ed systems suc h as the v ortex sh eet with surface tension and the water w a v e, w e do not exploit the existence of meromorphic solutions in our n umerical metho d ; how ev er, the n on-trivial time-p erio dic solutions w e fi nd do turn out to b e of th is form; see Section 6. 3 Linear Theory W e f ormulate th e p roblem of find ing time-p erio dic solutions of the Benjamin-On o equation as that of fi nding an initial condition u 0 and p erio d T suc h that F ( u 0 , T ) = 0, where F : H 1 × R → H 1 is giv en by F ( u 0 , T ) = u ( · , T ) − u 0 , u t = H u xx − uu x , u ( · , 0) = u 0 . (12) Clearly , stationary solutions are p erio dic with an y p erio d T . I n this section, w e lin earize F ab out th ese stationary solutions an d use solutions of the linearized p roblem as initial searc h directions to fin d time-p erio d ic solutions of the nonlinear p roblem. Bifu rcation fr om tra v eling w a ves can b e r educed to this case by adding an appropriate constan t and requ iring that the p erio d of the p erturb ation coincide w ith the p erio d of the trav eling w a ve (although there may b e a ph ase shift inv olv ed as well ). W e present a detailed analysis of the trav eli ng case in [A W]. 3.1 Linearization Ab out Stationary Solutions Let u = u N ,β b e an arbitrary N -h ump stationary solution. If u ( x ) + v ( x, t ) is to satisfy (1) to first order in v , then v should satisfy v t = H v xx − ( uv ) x . (13) (The exact solution satisfies v t = H v xx − ( uv ) x − v v x .) Equation (13) can b e written v t = iB Av , (14) Time-P erio dic Solutions of the Benjamin-Ono Equation 9 where the (u n b ounded, self-adjoin t) op erators A and B on H 1 are defined as A = H ∂ x − u, B = 1 i ∂ x . (15) T o solv e (14), w e are in terested in the eigen v alue problem B Az = ω z , (16) so that if B A has a co mp lete set of eigen v ectors, the general solutio n of (14) will b e a sup er p osition of functions of the form v ( x, t ) = Re { C z ( x ) e iω t } , C ∈ C . Of course, th e eigen v alues of a comp osition of Hermitian op erators need not b e real, bu t for A and B in (15), w e can compute all the eigenv alues explicitly , and they are in deed real. W e d o th is numerically (wh ic h surprisin gly leads u s to formulas we can c hec k analytica lly) b y trun cating the F ourier repr esen tations of A an d B and compu ting the eigen v alues of the matrix ˆ B ˆ A . More precisely , we c ho ose a cutoff frequency K (e.g. K = 240) and define the (2 K − 1) × (2 K − 1) matrices ˆ A k l = | k | δ k l − ˆ u k − l = | k | δ k l − ˆ u l − k , ˆ B k l = k δ k l , ( − K < k , l < K ) , (17) where ˆ u k w as giv en in (6) and δ k l = 1 if k = l and 0 otherwise. By carefully stu dying the eigen v alues for differen t v alues of N and β = − p (1 − α ) / (3 − α ) with α < 1, w e determined that ω N ,n = − ω N , − n n < 0 , 0 n = 0 , ( n )( N − n ) 1 ≤ n ≤ N − 1 , ( n + 1 − N ) n + 1 + N (1 − α ) n ≥ N . (18) With this n umberin g, the first N − 1 non-zero eigen v alues are indep end en t of α : n N ω N ,n = 1 2 3 4 5 6 · · · 1 ∗ ∗ ∗ ∗ ∗ ∗ · · · 2 1 ∗ ∗ ∗ ∗ ∗ · · · 3 2 2 ∗ ∗ ∗ ∗ · · · 4 3 4 3 ∗ ∗ ∗ · · · 5 4 6 6 4 ∗ ∗ · · · 6 5 8 9 8 5 ∗ · · · (19) Note that ω N ,N = (2 − α ) N + 1 ≥ N + 1 and ω N ,n is strictly increasing in n for n ≥ N , b ut ω N ,N could b e less than ω N , ⌊ N/ 2 ⌋ when N ≥ 6 (and some of th e eigen v alues can coalesce , increasing their multiplicit y). Nev ertheless, th e ordering of th e eigenv alues in (18 ) is more con v enien t than the monotonic ordering due to the fact th at a path wa y of n on- trivial solutions connecting an N -hump trav eli ng wa ve to an N ′ -h ump tra v eling wa v e with N < N ′ seems to in v olv e ω N ,n and ω N ′ ,n ′ with n ≥ N and n ′ < N ′ satisfying N ′ = n + 1 10 Da vid M. Am brose and Jon Wilk ening and n ′ = N ′ − N (see [A W].) These global reconnection form ulas w ould b e muc h more complicated if the eige nv alues w ere ordered monotonically . The zero eige nv alue ω N , 0 = 0 has geometric m ultiplicit y t w o and algebraic m ultiplicit y three. The fact that the dimension of the k ernel is indep enden t of α indicates that there are no sp ecial v alues of the mean N α at whic h th ese N -hump stationary solutions bifurcate to more complicate d stationary solutions. The t w o eigenfunctions in the kernel of B A are z (1 , 0) N , 0 ( x ) = − u x ( x ) = ∂ ∂ θ θ = 0 u N ,β ( x − θ ) , z (2) N , 0 ( x ) = ∂ ∂ | β | u N ,β ( x ) , (20) whic h corresp ond to translating the stationary solution by a phase or decreasing its mean, N α = N (1 − 3 | β | 2 ) / (1 − | β | 2 ). There is also a Jordan c hain [Wil07a] of length tw o asso ciated with z (1 , 0) N , 0 ( x ), namely z (1 , 1) N , 0 ( x ) = i, B Az (1 , 1) N , 0 = z (1 , 0) N , 0 . (21) The corresp onding solution of (14) is v ( x, t ) = − iz (1 , 1) N , 0 ( x ) + tz (1 , 0) N , 0 ( x ) = 1 − t u x ( x ) = ∂ ∂ ε ε =0 [ u ( x − εt ) + ε ] , i.e. this linear gro wth mo de arises du e to the f act that adding a constant to a stationary solution causes it to tra ve l. T h e multiple eigen v alues ω N ,n = ω N ,N − n with 1 ≤ n ≤ N − 1 p ose a minor ob s tacle to obtaining explicit form ulas for the eigenv ect ors. W e ev en tually realized that b ecause the sh ift op erator S θ z ( x ) = z ( x − θ ) , ˆ S θ , k l = e − ik θ δ k l , θ = 2 π / N (22) comm utes with B A , the eigenspaces of B A are in v arian t under th e action of S θ . Thus w e can imp ose the additional requirement that if z is an eigenv ect or of B A corresp onding to a m ultiple eigen v alue, then z should also satisfy ˆ z k 6 = 0 and ˆ z l 6 = 0 ⇒ k − l ∈ N Z , (23) i.e. the non-zero F ourier co efficien ts are equally spaced with stride length N . Using th is condition to mak e the eigen v ectors unique up to scaling, we we re able to recog nize the patterns that emerge in the n umerical eige nv ectors (with the exception of the co efficient C and the j = 0 case when n ≥ N , whic h w e determined analytically): ˆ z N ,n,k k = n + j N = 1 + N ( | j |− 1) N − n ¯ β | j |− 1 j < 0 C 1 + N j n β j +1 j ≥ 0 , 1 ≤ n ≤ N − 1 C = − nN ( N − n ) n +( N − n ) | β | 2 ! , ˆ z N ,n,k k = n − N +1+ j N = 0 j < 0 − ¯ β (1 −| β | 2 ) 2 h 1 − 1 − N n +1 | β | 2 i j = 0 1 + N ( j − 1) n +1 β j − 1 j ≥ 1 , ( n ≥ N ) . (24) Time-P erio dic Solutions of the Benjamin-Ono Equation 11 These form ulas can b e summed to obtain z N ,n ( x ) as a rational fu nction of e ix , but w e prefer to w ork with the F ourier co efficients. Note that as n → ∞ (holding N fixed), the index k = n − N + 1 of the first non-zero F ourier mo de increases to infinit y . The eigen v ectors corresp ondin g to negativ e eige nv alues ω N , − n with n ≥ 1 satisfy z N , − n ( x ) = z N ,n ( x ), so the F ourier co efficients app ear in rev erse order, conju gated: ˆ z N , − n,k = ˆ z N ,n, − k . When β is real, th e F ourier co efficients are real and z N , − n ( x ) = z N ,n ( − x ). W e ha v e verified the form ulas (18) and (24) analytically , and can also pro v e that the F ourier representa tion of these eigenv ect ors (together with th e asso ciated v ector corresp onding to the Jordan chain) form a Riesz b asis for ℓ 2 ( Z ); hence, w e ha ve not missed any eigen v alues. 3.2 Bifurcation from Stationary Solutions No w that w e ha v e solv ed the eigen v alue problem for B A , we can compute the deriv ativ e of the op erator F in (12) abov e. W e con tin ue to assume that u is an N-h ump stationary solution so that D F = ( D 1 F , D 2 F ) : H 1 × R → H 1 satisfies D 1 F ( u, T ) v 0 = ∂ ∂ ε ε =0 F ( u + εv 0 , T ) = v ( · , T ) − v 0 = e iB AT − I v 0 , D 2 F ( u, T ) τ = ∂ ∂ ε ε =0 F ( u, T + ετ ) = 0 . (25) Note that v 0 ∈ ker D 1 F ( u, T ) iff the solution v ( x, t ) of the linearized p roblem is p erio dic with p erio d T . These solutions of the linearized problem serv e as initial search directions in whic h to fin d p erio dic solutions of th e non-linear problem. Since D 2 F = 0 in the stationary case, the n ullspace N of D F = ( D 1 F , D 2 F ) is of the form N = N 1 × R where N 1 = k er D 1 F . A b asis for N 1 consists of the functions v 0 ( x ) = Re { z N ,n ( x ) } and v 0 ( x ) = Im { z N ,n ( x ) } , (26) where n ranges ov er all in tegers such that ω N ,n T ∈ 2 π Z . (27) Negativ e v alues of n ha ve already b een accoun ted for in (26 ) u sing z N , − n ( x ) = z N ,n ( x ). The n = 0 case alw a ys yields t wo vec tors in the ke rnel, namely those in (20). These d irections do not cause bifurcations as they lead to other stationary solutions in the t wo parameter family . Thus, the p erio ds at which bifu rcations are exp ected are T N ,n,m = 2 π m ω N ,n , ( m, n ≥ 1) . (28) Note that th is set is dense on the p ositiv e real line since ω N ,n → ∞ as n → ∞ . Th is leads to a small d ivisor problem w hen trying to apply the Liapunov-Sc hmidt red uction [GS85, Kie04] to rigorously analyze bifurcations in th e s et of s olutions of the equation F ( u 0 , T ) = 0. F or other p roblems, small d ivisors hav e b een d ealt with successfu lly using Nash-Moser theory; see e.g. [Nir01, PT01, IPT05]. As most of the bifurcations resp onsible for the small divisor p roblem inv olv e high frequen cy p erturbations th at are smo othed out 12 Da vid M. Am brose and Jon Wilk ening 12.5 12.6 12.7 12.8 12.9 13 13.1 0 1 2 3 4 5 6 7 8 amplitude T Amplitude of traveling wave versus period α 0 = 1/2 n = 1 n = 2 n = 7 4 π Figure 2: First sev en bifurcations from the constan t solution u ( x ) = α 0 to trav eling w a ves with n -h ump s. The p er io d sho wn is T = 2 π m/ [ n ( nα − α 0 )] with m = 2 n ( n − 1 / 2). W e u sed this to solve for | β | in terms of T via (3 ). Th e amp litude sho wn is the difference b et w een the maxim um and minimum v alues of the solution, i.e. 8 n | β | / (1 − | β | 2 ). b y the numerica l discretization, we ha ve not found sm all divisors to cause ma j or difficu lties in our abilit y to trac k paths of time-p erio dic solutions. In our n umerical studies, we ha v e found that eac h of the eig enfu nctions z N ,n ( x ) with n ≥ 1 giv es a direction along which a sheet of non-trivial solutions bifurcates from the N - h ump stationary solution. More precisely , if w e let a parameter ε → 0, there app ear to b e time-p erio dic solutions of the nonlinear pr oblem with p erio d T ε = T N ,n,m + O ( ε 2 ) that agree with the r eal and imaginary parts of εz N ,n ( x ) at t = 0 and t = − T ε / (4 m ), resp ective ly , to O ( ε 2 ). This is in teresting b ecause in cases that sev eral (ev en infi nitely man y) of the eigenfunctions z N ,n ( x ) lead to solutions of the linearized problem w ith th e same p erio d, most linear combinatio ns of these solutions will not giv e a bifurcation direction. In other w ords, the eigenfunctions z N ,n ( x ) are already diagonaliz ed with resp ect to the nonlinear effects of the bifurcation. F or this to work out, it is essen tial th at when ω N ,n is a multiple eigen v alue, z N ,n ( x ) is c hosen as in (23) to simultaneo usly diagonalize th e shift op erator S 2 π / N . W e observe an an alogous ph en omenon when b ifurcating fr om constan t solutions to tra v- eling w av es; see Figure 2. When u = α 0 is a constan t f unction in (15) ab o v e, ˆ A and ˆ B are b oth diagonal matrices, the eigenv alues and eigen v ectors of B A are given by ω n = n ( | n | − α 0 ) , z n ( x ) = e inx , ( n ∈ Z ) , and the b ifurcation times are given b y T n,m = 2 π m/ ( n | α 0 − n | ) , ( n, m ≥ 1) . Time-P erio dic Solutions of the Benjamin-Ono Equation 13 Note that in this s implified pr oblem, the bifurcation index n turns out to b e the n umber of humps. If α 0 = 1 / 2 and T = 4 π , then ω n T ∈ 2 π Z for every n , i.e. the kernel N 1 of D 1 F ( u, T ) is the whole sp ace H 1 . Nev ertheless, the tra v eling solutions th at emerge from this bifurcation are no different than if α 0 w ere irrational and N 1 w ere span n ed by { 1 , cos nx, sin nx } for some fixed n — they all just h app en to join toget her at T = 4 π for this v alue of the mean. More sp ecifically , the n -hump tra vel ing solutions u α 0 ,n,β ( x, t ) defined in (8) ab o v e ha v e the pr op ert y that as β → 0 (and h en ce α → 1), a multiple m of their shortest p erio d 2 π / [ n ( nα − α 0 )] con v erges to 4 π . So while cos x and cos 2 x are eac h bifurcation directions for initial conditions that lead to p erio dic s olutions of the nonlinear problem, (cos x + cos 2 x ) is not. 4 The Metho d In order to compute non-trivial time p erio dic solutions, w e define the f unctional G tot ( u 0 , T ) = G ( u 0 , T ) + ϕ ( u 0 , T ) (29) with G ( u 0 , T ) = 1 2 Z 2 π 0 [ u ( x, T ) − u 0 ( x )] 2 dx (30) and lo ok for minimizers of G tot with the hop e that the minimum v alue will b e zero. Here ϕ ( u 0 , T ) is a n on -n egativ e p enalty function designed to eliminate sp atial and temp oral ph ase shifts and sp ecify the mean α 0 and the amplitude of one of the F our ier mo des at t = 0. Our first goal is to fin d an efficient metho d of computing the v ariatio nal deriv ativ e of G . As usual in optimal con trol prob lems [Pir84], there is an adjoin t PDE that allo ws us to compu te δG δu 0 in as little time as it tak es to compu te G itself. W e will then u se a sp ectral metho d in space and a four th order semi-implicit Ru nge-Kutta metho d [CS83, KC03, Wil07b ] in time to solv e the Benjamin-On o and adjoin t equatio ns to compute G , δG δu 0 and ∂ G ∂ T in the inner lo op of the BF GS minimization algo rithm [Bro70, NW99]. 4.1 V ariationa l Der iv ative of G Let u 0 b e an y function in H 1 (not necessarily leading to a p erio dic solution). Evidently , ∂ ∂ T G ( u 0 , T ) = Z 2 π 0 [ u ( x, T ) − u 0 ( x )] u t ( x, T ) dx. (31) Let v 0 ∈ H 1 b e giv en and define ˙ G = D 1 G ( u 0 , T ) v 0 , i.e. ˙ G = d dε ε =0 G ( u 0 + εv 0 , T ) = Z 2 π 0 [ u ( x, T ) − u 0 ( x )][ v ( x, T ) − v 0 ( x )] dx. (32) Here v ( x, t ) = ˙ u ( x, t ) = d dε ε =0 u ( x, t, ε ) with u ( x, t, ε ) the solution of Benjamin-Ono with initial condition u ( x, 0 , ε ) = u 0 ( x ) + εv 0 ( x ). W e can compute v b y solving the v ariational equation v t = H v xx − ( uv ) x , v ( x, 0) = v 0 ( x ) , (33) 14 Da vid M. Am brose and Jon Wilk ening whic h is linear b ut non-autonomous (as u d ep ends on time in general). Our n ext task is to eliminate v ( x, T ) from (32) and represent ˙ G as an in ner pro du ct: ˙ G = Z 2 π 0 δ G δ u 0 ( x ) v 0 ( x ) dx. (34) The idea is to defin e a fu nction w ( x, s ) going backw ard in time (w ith s = T − t ) suc h that w ( x, 0) = w 0 ( x ) = u ( x, T ) − u 0 ( x ) (35) and then determine h o w w should ev olv e so that Z 2 π 0 w ( x, 0) v ( x, T ) dx = Z 2 π 0 w ( x, T ) v ( x, 0) dx. (36) Let us d efine the solution op erator V ( t 2 , t 1 ) : H 1 → H 1 for the linearized equation (33) as the mapping that ev olv es an initial condition sp ecified at time t 1 to the solution at time t 2 . These op erators satisfy a non-autonomous, time r ev ersible v ersion of familiar semigroup prop erties: V ( t 1 , t 1 ) = I , V ( t 3 , t 1 ) = V ( t 3 , t 2 ) V ( t 2 , t 1 ) , ( t 1 , t 2 , t 3 ∈ R ) . (37) Equation (36) ma y no w b e written h w 0 , V ( T , 0) v 0 i = h W ( T , 0) w 0 , v 0 i (38) where h· , ·i is the L 2 inner pro duct and w e define W ( s 2 , s 1 ) = V ( t 1 , t 2 ) ∗ with t j = T − s j . It follo ws from (37) that W ( s 1 , s 1 ) = I and W ( s 3 , s 1 ) = W ( s 3 , s 2 ) W ( s 2 , s 1 ). What remains is to d etermine h o w this non-autonomous semigroup W is generated. T aking the inner pro du ct of v t with w , we h a v e Z v t ( x, t ) w ( x, s ) dx = lim h → 0 Z V ( t + h, t ) − V ( t, t ) h v ( x, t ) w ( x, s − h ) dx = lim h → 0 Z v ( x, t ) W ( s, s − h ) − I h w ( x, s − h ) dx = Z v ( x, t ) w s ( x, s ) dx. (39) W e learn th at Z v w s dx = Z v t w dx = Z [ H v xx − ( uv ) x ] w dx = Z v [ − H w xx + uw x ] dx, (40) i.e. w sh ould solv e the adjoin t equation to (33), namely w s ( x, s ) = − H w xx ( x, s ) + u ( x, T − s ) w x ( x, s ) . (41) The time reve rsal in the in homogeneous term u ( x, T − s ) is signifi can t. Com bining this with (32) and (34), w e conclude th at δ G δ u 0 ( x ) = w ( x, T ) − w 0 ( x ) , (42) where w s olv es (41) with initial condition (35). Remark: W e emphasize that the steps w e ha ve j ust follo w ed for the Benjamin-On o equation can in principle b e carried out f or an y P DE. These steps are simp ly: Time-P erio dic Solutions of the Benjamin-Ono Equation 15 1. Find the v ariational equation analogo us to (13) 2. Find the app ropriate adj oin t equation, accoun ting for time-rev ersal. The d etails of the initial condition of the adjoin t p roblem and the formula for δG δu 0 dep end on the particular fun ctional G we choose, bu t they are usually straigh tforw ard to wo rk out. F or example, as another v arian t, w e could define G ( u 0 , T ) = 1 2 Z 2 π 0 [ u ( x, T / 2) − u (2 π − x, T / 2)] 2 dx (43) to imp ose ev en s ymmetry at th e h alf-wa y p oin t. (Recall that if u 0 is symmetric, then u (2 π − x, T / 2) = u ( x, − T / 2)). In this case w e fin d that δ G δ u 0 ( x ) = 2 w ( x, T / 2) , w 0 ( x ) = u ( x, T / 2) − u (2 π − x, T / 2) , (44) or, since v 0 is assumed symmetric in this f orm ulation, δG δu 0 ( x ) = w ( x, T / 2) + w (2 π − x, T / 2). In subsequ en t w ork, w e will ap p ly the metho ds of this pap er to the v ortex sheet with surface tension and to the wa ter w a v e. Although step 2 usually amoun ts to a simple int egration by parts as wa s done in (40) ab o v e, the adjoint calculation can b e quite in v olv ed for systems of PDEs with more complicated nonlin earities suc h as the Birkhoff-Rott integral in th e vo rtex sheet problem (see [A W09]). 4.2 The Numerical Metho d W e minimize G tot using the BF GS algorithm [NW99], whic h is a quasi-Newton line searc h metho d that builds an appro ximate Hessian incremental ly from th e history of gradients it has ev aluated. As a blac k b o x u n constrained minimization alg orithm, it requires only an initial guess and subroutines to compute G tot ( q ) and ∇ q G tot ( q ), where q ∈ R d con tains the numerical d egrees of fr eedom us ed to represen t u 0 and T . W e use a solution of the linearized pr ob lem for the initial guess near a stationary solution or tra v eling wa ve, and then use linear extrap olation (or the result of the p r evious iteration) for the initial guess in subsequent calculations as w e v ary th e bifur cation parameter. In ou r implemen tation, we w rote a C++ w rapp er around J. No cedal’s L-BF GS F ortran co de release d in 1990, but we turn off the limited memory asp ect of the co de since computing G tak es more time than the linear algebra asso ciated with up d ating the fu ll Hessian matrix. W e do find that the algorithm conv erge s quad r atically once it gets close to a m inimizer. Our co de also make s use of the FFTW and LAP A CK libraries, but was otherwise w r itten from scratc h. W e represen t u ( x, t ) sp ectrally as a sum of M (typica lly 384 or 512 ) F our ier mo des, u ( x, t ) = M / 2 X k = − M / 2+1 c k ( t ) e ik x , c k ∈ C . (45) Since u is real, we u se the r2c v ersion of the FFT algorithm, which only accesses the co efficien ts c k with k ≥ 0, assuming c − k = ¯ c k . W e also zero out the Nyqu ist frequen cy c M / 2 16 Da vid M. Am brose and Jon Wilk ening so th at the total num b er of (real) d egrees of freedom repr esen ting u at time t is M − 1. W e use d = M / 2 degrees of freedom to represent u 0 and T , namely q = ( a 0 , T , a 1 , b 1 , . . . , a M / 4 − 1 , b M / 4 − 1 ) ∈ R d , ( c k = a k + ib k , t = 0) . (46) The remaining F ourier mo d es in u 0 are tak en to b e zero. The reason for u s ing fewer F ourier mo des in the initial condition is that in order to a voi d aliasing errors, we wan t the upp er half of the s p ectrum to remain close to zero throughout the calcula tion; therefore, we do not w ish to giv e BF GS the opp ortunit y to mo dify th ese co efficients. W e increase M and rep eat the calculat ion an y time one of the high frequency ( k ≥ M / 4) F ourier mo des of the optimal solution exceeds 10 − 13 in magnitude at an y timestep. T o compute G ( q ), w e write the Benjamin-Ono equation in the form u t = f ( u ) + g ( u ) , g ( u ) = H u xx , f ( u ) = − 1 2 u 2 x , (47) where 1 2 u 2 is ev al uated on th e grid { x j = 2 π j / M : 0 ≤ j ≤ M − 1 } in p h ysical space wh ile H and ∂ x are ev aluat ed in F ourier space. The trap ezoidal rule in physical space is used to ev aluate the in tegral (30 ) defi ning G . T o ev olv e the solution, w e use the stiffly stable, additiv e (i.e. implicit-explicit) Run ge-Kutta metho d of Kenn edy and C arp enter [K C03, Wil07b] known as ARK4(3)6L[2] SA with a fixed timestep h = T / N , where N is chosen to b e large enough that furth er refin emen t do es not improv e the solution. Briefly , the id ea of an ARK metho d is to treat f explicitly (as it is non-linear) while treating g implicitly (as it is th e source of s tiffness): k i = f t n + c i h, u n + h P j a ij k j + h P j ˆ a ij ℓ j , ℓ i = g t n + ˆ c i h, u n + h P j a ij k j + h P j ˆ a ij ℓ j , u n +1 = u n + h P j b j k j + h P j ˆ b j ℓ j . c A b T for f ˆ c ˆ A ˆ b T for g (48) The Butcher arra y for f satisfies a ij = 0 if i ≤ j and for g satisfies ˆ a ij = 0 if i < j , whic h allo ws the stage der iv ativ es to b e solv ed f or in order: ℓ 1 , k 1 , ℓ 2 , k 2 , . . . , ℓ 6 , k 6 , where our sc heme has 6 stages. See [K C03] for the sc heme co efficients and [Wil07b] for details on solving the implicit equations in the similar cases of Burgers’ equation and the KdV equation. Once u ( x, T ) is kno wn, w e use the same sc heme to solv e the adjoint equation w s = f ( s, w ) + g ( w ) , g ( w ) = − H w xx , f ( s, w )( x ) = u ( x, T − s ) w x ( x ) . (49) The main difficulty is th at the int ermediate stages of the ARK metho d r equire the v alue of u at intermediate times (b et we en timesteps). F or this w e use cub ic Hermite interp olation, matc hing u and u t at the timesteps stradd ling the required intermediate time: u ( · , t n + θ h ) = (1 − θ ) u n + θ u n +1 − θ (1 − θ ) (1 − 2 θ )( u n +1 − u n ) − (1 − θ ) h∂ t u n + θ h∂ t u n +1 where 0 < θ < 1. This yields fourth order accurate v alues of u in the righ t hand side of (49), whic h is suffi cien t to ac hiev e a fourth order accurate global solution w . W e include Time-P erio dic Solutions of the Benjamin-Ono Equation 17 the option in our co de to store u only at certain milemarke r times, and then regenerate the data at all timesteps b et w een milemarkers as so on as the w equation en ters th at r egion; this dramatically red u ces the memory r equiremen ts of the co de at the exp ense of ha ving to compute u t wice. Once u ( x, T ) and w ( x, T ) are kn o wn with the p erio d and initial conditions sp ecified in q ∈ R d , we compute G ( q ) u sing the trap ezoidal rule in physica l space to ev aluate the in tegral in (30), and we compute ∂ G ∂ q j b y taking the FFT of δG δu 0 and s caling eac h comp onent appropriately: ∂ G ∂ q 0 = Z 2 π 0 δ G δ u 0 ( x ) 1 dx = 2 π δG δu 0 ∧ 0 ∂ G ∂ q 1 = ∂ G ∂ T = Z 2 π 0 [ u ( x, T ) − u 0 ( x )] u t ( x, T ) dx, ← − use trap. rule in ph ysical space ∂ G ∂ q 2 k = ∂ G ∂ a k = Z 2 π 0 δ G δ u 0 ( x ) e ik x + e − ik x dx = 4 π Re δG δu 0 ∧ k , ( k ≥ 1) , ∂ G ∂ q 2 k + 1 = ∂ G ∂ b k = Z 2 π 0 δ G δ u 0 ( x ) ie ik x − ie − ik x dx = 4 π Im δG δu 0 ∧ k , ( k ≥ 1) . (50) W e r emark that these f ormulas for the deriv ative s of the numerical ve rsion of G essentiall y assume that w e ha v e solv ed the PDE exactly (so that the calculus of v ariatio ns app lies to our numerical solutions). This is reasonable in our case as we are using sp ectrally accurate sc hemes, but would cause difficulties if the numerical solution were only first or second order accurate in space or time. 4.3 Choice of Pena lty F unction ϕ W e still need to define the p enalt y fu nction ϕ ( u 0 , T ) in (29) and sh o w ho w to compute its gradien t with resp ect to q . Th e pur p ose of ϕ is to pin d own the mean an d the phase sh ifts in sp ace and time as we ll as to sp ecify the b ifurcation parameter. W e h av e explored several successful v arian ts whic h b ecame more sp ecialized as our und erstanding of the problem increased. As some of these v arian ts may p ro v e useful in other problems, we describ e them here. Initially we did not in clude a p enalt y function in G tot , bu t without it, th e BF GS algo - rithm in v ariably con v erges to a constan t solution. Next w e constrained q 2 , the real part of the first F ourier mo de ˆ u 1 ( t ) = a 1 ( t ) + ib 1 ( t ) at t = 0, to h a v e a giv en v a lue ρ . W e r easoned that as long as ρ is not to o large, the BF GS algorithm can v ary q 3 = b 1 (0) to find a p erio dic solution, so all we are d oing is pinning d o wn a phase. This w as done b y definin g ϕ ( u 0 , T ) = 1 2 [ a 0 (0) − α 0 ] 2 + [ a 1 (0) − ρ ] 2 or ϕ ( q ) = 1 2 [ q 0 − α 0 ] 2 + [ q 2 − ρ ] 2 , whic h w orks well to rule ou t the constan t solutions bu t generally leads to tra v eling w a ve s. By studying these tra v eling wa v es, w e determined the formulas of Section 2 and also observ ed that for some choice s of ρ and starting guess q (0) , the w a ve b ecomes “w obbly ,” indicating that a non-trivial solution migh t b e nearb y . 18 Da vid M. Am brose and Jon Wilk ening T o rule ou t tr av eling w a v es, w e c hose a parameter η ∈ [ − 1 , 1] and defined ϕ ( u 0 , T ) = 1 2 [ a 0 (0) − α 0 ] 2 + [ a 1 (0) − ρ ] 2 + [ a 1 ( T / 2) − η a 1 (0)] 2 + [ b 1 ( T / 2) − η b 1 (0)] 2 . Our idea her e wa s that a (one-h ump) trav eling wa v e would hav e η = ± 1, dep ending on how man y times it passed thr ough the d omain in time T ; hence, inte rmed iate v alues of η w ould ha v e to corresp ond to n on-trivial solutions. T o compute the gradien t of ϕ w hen it inv olv es F ourier mod es at late r times, we simply solv e another adjoint pr oblem. Sp ecifically , if ϕ in vo lv es one of a k ( T / 2) = 1 2 π Z 2 π 0 u ( x, T / 2) cos ( k x ) dx, b k ( T / 2) = 1 2 π Z 2 π 0 u ( x, T / 2)[ − sin ( k x )] dx, w e will need to compute δ δu 0 a k ( T / 2) or δ δu 0 b k ( T / 2), whic h can b e done b y setting w 0 ( x ) = 1 2 π cos( kx ) , or w 0 ( x ) = − 1 2 π sin( k x ) and solving (41) from s = 0 to s = T / 2; the result w ( x, T / 2) is th e desired v ariational deriv ativ e. These ma y then b e used to compute ∂ ∂ q j a k ( T / 2) or ∂ ∂ q j b k ( T / 2) as was done for G in (50), at wh ic h p oint it is a simple m atter to obtain ∂ ϕ ∂ q j . This pro cedure prov ed very effectiv e in obtaining n on-trivial time p erio dic solutions. The BF GS algo rithm is able to minimize G tot do wn to 10 − 26 , at whic h p oint round off error prev en ts fur ther redu ction. With ran d om initia l data q (0) (whic h w e tried b efore w e had s olv ed the eigen v alue p roblem for the linearization), th e algorithm explores quite a wide r egion of the p arameter space, with all comp onen ts of q (including T ) c hanging substanti ally — we do n ot seem to get s tu c k in non-zero lo cal minima of G tot . Once we do find a non trivial solution, v arying η leads to other nearb y p er io dic s olutions. Studying this family of solutions, w e finally realized that w e w ere d ealing with a four parameter family of non trivial s olutions with the mean, t wo phases and a bifurcation pa- rameter describing them. The main d ra wbac k of using η as the bifurcation parameter is that the sp atial and temp oral ph ases are not sp ecified indep end en tly , but ins tead dep end on η in a complicated wa y . A m ore natural c hoice is to define ϕ ( u 0 , T ) = 1 2 [ a 0 (0) − α 0 ] 2 + [ a k (0) − ρ ] 2 + [ b k (0)] 2 + [ ∂ t a k (0)] 2 , (51 ) i.e. we use ϕ to imp ose the mean α 0 , the b if u rcation parameter ρ , the spatial ph ase b k (0) = 0, and the temp oral phase ∂ t a k (0) = 0. Giv en any solution, we can alwa ys translate sp ace and time to ac hiev e the latter tw o conditions — w e ha ve not made any sym metry assumptions here. T he index k w e use d ep ends on the num b er of humps N and bifurcation index n of the linearized solution; the only r equiremen t is that ˆ z N ,n,k in (24 ) b e non-zero. One readily c hec ks th at ∂ t a k (0) = 1 2 π Z 2 π 0 u t ( x, 0) cos k x dx = 1 2 π Z 2 π 0 − k 2 u 0 + ( k / 2) u 2 0 ( − sin k x ) dx, (52) from whic h we obtain δ δu 0 [ ∂ t a k (0)]( x ) = 1 2 π ( k 2 − k u 0 ( x )) sin k x . Although (51) do es not ru le out tra v eling wa ves, w e h av e no difficult y b ifurcating from trav eli ng wa v es to n on-trivial solutions b y choosing a starting guess th at includes first order corrections from the linear theory of Section 3 . Time-P erio dic Solutions of the Benjamin-Ono Equation 19 5 Non-T rivial Time-P erio dic S olutions W e n o w use the method s describ ed ab o v e to study the global b ehavi or of non-trivial time- p erio d ic solutions f ar b ey ond the realm of v alidit y of the linearization ab out s tationary and tra v eling w a ves. W e fin d that these non-trivial solutions act as r ungs in a ladder, connecting stationary and tra v eling s olutions with differen t sp eeds and w a v elengths by creati ng or annihilating oscillatory humps that gro w or shrink in amplitude until they b ecome part of the statio nary or tra v eling wa v e on the other side of the rung. T he dyn amics of these n on- trivial solutions are often v ery in teresting, sometimes r esem bling a lo w amplitude trav eling w a ve su p erimp osed on a lo w er frequency carrier signal, and other times b eha ving lik e t w o b ouncing solitons that rep el eac h other to av oid coalescing. In th is sectio n, we presen t a detailed numerical stud y of the path of non-trivial solutions connecting the one-h ump stationary solution to the tw o-h ump tra v eling w a v e. In S ection 6, w e d eriv e exact form ulas for the solutions on this path. In a follo w-up pap er [A W], we classify all bifurcations from tra v eling w a ve s, study the paths of n on-trivial solutions connecting sev eral of them, and prop ose a conjecture exp laining ho w they all fit together. Consider the p erio dic solutions obtained by b ifurcation from the one-h ump stationary solution at the lo w est frequen cy , ω 1 , 1 . W e arbitrarily set the mean α 0 = 0 . 544 375 f or these sim ulations (see Figure 1 ab ov e), b u t as shown in Section 6, an y c hoice of α 0 < 1 wo uld lead to similar resu lts. In the top pane of Figure 3, w e show the one-hump stationary solution u 1 ,β ( x ) with β = − p (1 − α 0 ) / (3 − α 0 ) toget her with the (initial conditions of the) t wo p erio d ic solutions v (0) ( x, t ) = Re { z 1 , 1 ( x ) e iω 1 t } , v (1) ( x, t ) = Im { z 1 , 1 ( x ) e iω 1 t } (53) of th e linearized equation (13) corresp onding to the first eigen v al ue ω 1 , 1 = 3 − α 0 of B A = − i∂ x ( H ∂ x − u ). The n atural p erio d of these solutions is T = 2 π /ω 1 , 1 = 2 . 558 69. Note how the non-linearit y of Benjamin -Ono distorts these tw o-h ump p erturbations as they tra ve l (to the left) on top of the one-h um p stationary “carrier” solution. Also note th at v (0) and v (1) are actually the same solution with a T / 4 phase lag in time: v (0) ( x, T / 4) = − v (1) ( x, 0) while v (1) ( x, T / 4) = v (0) ( x, 0) . W e c ho ose the real part of the first F ourier mo de as the bifu r cation parameter ρ so that k = 1 in the definition (51 ) of ϕ . As w e v ary ρ = a 1 (0) from − 2 p (1 − α 0 ) / (3 − α 0 ) to 0, w e trav erse the tra jectory from B to F in the bifurcation diagram of Figure 4. The curve s corresp ondin g to the in termediate p oin ts H0, J0 and K0 along this path are sho wn in blac k in p anes 2–4 of Figure 3. Along this path, w e see th at a second hump f orms at x = 0 while the cen ter hump sharp ens to accommo date the shorter wa v elength of th e tw o-h ump tra v eling wa v e. If we instead increase | ρ | near p oin t B in the diagram, w e ob tain th e low er path connecting B to G. Along this path, th e cen ter h ump decreases in magnitude (curv e H5), form s a dimple in th e middle (cur v e J10), s plits into t wo humps (cur v e K10), and again turns into a t w o-h ump tra ve ling wa v e (curv e G). These curves are related to those on the path from B to F by a T / 2 p hase sh if t in time. If w e change the sign of β (i.e. shift the p hase by π ) in the stationary solutio n and call the r esulting curv e C , the bifurcation diagram is reflected ab out the T axis. The path f rom B (or C) to F is easier to compute due to the tur ning p oin t in | ρ | on th e path from B (or C) to G. 20 Da vid M. Am brose and Jon Wilk ening −1.5 0 1.5 3 4.5 Periodic solutions sampled at equal time intervals u B stationary solution ( α =.544375) basis for periodic solutions of the linearized problem T=2.55869 −1.5 0 1.5 3 4.5 u H0 H5 (t=T/2) T=2.56580 −1.5 0 1.5 3 4.5 u J0 J10 J10 (t=T/2) J5 J5 (t=T/4) T=2.68026 −1.5 0 1.5 3 4.5 u T=3.11985 K0 K10 K10 0 π/3 2π/3 π 4π/3 5π/3 2π −1.5 0 1.5 3 4.5 x u T=3.14159 F G two−hump traveling solution Figure 3: Progression from a one-h ump stationary solution (top) to a t w o-h ump tra v eling w a ve (b ottom, m oving left) b y v arying the r eal part of th e first F ourier mo de at t = 0 wh ile holding the mean α 0 constan t and choosing the spatial and temp oral ph ases su c h ϕ in (51) is zero. The lab els B, F, G, H0, J0, etc. corresp on d to Figures 4–8. Time-P erio dic Solutions of the Benjamin-Ono Equation 21 2.2 2.4 2.6 2.8 3 3.2 3.4 −1.5 −1 −0.5 0 0.5 1 1.5 A B C F,G D, E H0 J0 K0 constant, two−hump traveling, one hump stationary ( ±π /2) one−hump stationary, β >0 one−hump stationary, β <0 T a 1 Extrema of first Fourier mode vs. Period Figure 4: Bifu r cation from one-hump stationary solutions (B and C) to non-trivial time- p erio d ic solutions that re-connect with t w o-h ump tra v eling wa v es at F an d G. −1 −0.5 0 0.5 1 −1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1 Trajectories of first Fourier mode a 1 b 1 B C D E F,G H0 J5 J0 J19 K0 Figure 5: The tra jectories of the first F our ier mo d e in the complex p lane are exactly circular. The mark ers on the left lob e corresp ond to the solutions sh o wn in Figure 3. 22 Da vid M. Am brose and Jon Wilk ening By the time we reac h K 0 on th e path from B to F, we can view our solution as a t w o-h um p tra ve ling w a v e with a sm all one-hump s tationary p erturbation corresp ond in g to the fir s t eigen v alue ω 2 , 1 = 1 in the linearization ab out the t wo -hump tra veli ng w a v e. A f u ll analysis of the linearization ab out trav eling wa v es is giv en in th e follo w-up pap er [A W], bu t the idea is that if u ( x ) is a stationary solution and U ( x, t ) = u ( x − ct ) + c is a tra v eling wa v e, then the s olutions v and V of th e linearizations ab out u and U satisfy V ( x, t ) = v ( x − ct, t ). No w, the linearized solutions Re { z 2 , 1 ( x ) e iω 2 , 1 t } and Im { z 2 , 1 ( x ) e iω 2 , 1 t } ab out the tw o-h ump stationary solution ha ve the prop erty th at z 2 , 1 ( x − π ) = − z 2 , 1 ( x ); hence, when they are used as p erturbations on a tw o-h ump tr aveling wa v e, they need to progress th rough an extra half-cycle in time to mak e up for the sign c hange. As a resu lt, ω 2 , 1 T m ust b elong to π + 2 π Z (rather than 2 π Z itself ) for the linearized solution to b e p erio dic. It turn s out that as we tra verse the path from B to F, the p erio d of the solution increases from T = 2 π /ω 1 , 1 up to T = π /ω 2 , 1 = π (r ather than e.g. 3 π or 5 π ). Note that as ω 2 , 1 = 1 is indep end ent of α 0 , the path connecting the one h ump stationary s olution to the t w o-h ump tra v eling wa v e alw a ys termin ates at T = π , r egardless of th e mean. In Figure 5, we plot the tr a jectories of the first F ourier mo de c 1 ( t ) = a 1 ( t ) + ib 1 ( t ) in th e complex plane for v arious c hoices of the bifur cation parameter ρ = a 1 (0). W e were surprised to fi n d that th ese tra jectories are exactly circular; this will b e discussed further b elo w. The mark ers on the left (west) lobe of circles corresp ond to solutions plotte d in Figure 3; for example, J19 corresp onds to u x, 19 20 T , which is the dotted curv e immediately to the right of the initial condition J0 in the cen ter pane of Figure 3. F or v isib ilit y , we only plotted 10 timeslices in the ev olution of H0. The four parameter family of n on-trivial s olutions can b e seen in Figure 5. A giv en solution is repr esen ted b y on e of the circular tra jectories. The t w o main parameters de- scribing this family are the mean α 0 and the d istance fr om the nearest p oint on the circle to the origin. A spatial phase shift of th e initial condition by θ (with the sign con v entio n of Eq. (22)) amounts to a clo c kwise r otation of the circle ab out th e origin by θ (or k θ for the k th F ourier mo de). The north, east and south lob es of circles represent spatial ph ase shifts of the west lob e of solutions by θ = π / 2, π and − π / 2, resp ectiv ely , bu t an y other ph ase shift θ ∈ R is also allo w ed. Finally , a temp oral ph ase shift amount s to c ho osing w hic h p oin t on the circle we assign to t = 0. Requiring th at the initial condition h a v e ev en symmetry yields either the w est or east lob e of s olutions w ith t = 0 o ccurring along the real axis. W e can also use other F ourier m o des for the bifu rcation parameter. This is esp ecially imp ortant to trac k h igher order b ifurcations from m ulti-hump trav eling wa ves — in these cases, the fi rst seve ral F ourier mo des remain zero for all solutions in the f amily at all times t . But ev en for the simplest p ath connecting one-h ump stationary solutions to tw o- h ump tra v eling wa v es, it is useful to stud y other bifu rcation diagrams r epresen ting this same family of solutions. In Figure 6, w e sho w the result when the second F ourier m o de is used instead of the first. By setting ρ = a 2 (0), we can no w also see the bifur cation (lab eled A) f rom the constant solution u ≡ α 0 to the t wo -hump tra v eling wa v es; moreo v er, the p oints F and G that fell on top of eac h other in Figure 4 b ecome distinct. The outer curv e conn ecting F to G via A represent s the set of t wo -hump tra vel ing w a ves mo ving left with mean α 0 . This curve wa s plotted parametrically , s etting a 2 = ± 2 N p (1 − α ) / (3 − α ) and T = 2 π / [ N ( N α − α 0 )] with N = 2 and α ranging o v er all v alues such that α ≤ 1 and Time-P erio dic Solutions of the Benjamin-Ono Equation 23 T ≤ 3 . 5. It is in teresting to note that the b if u rcation at F (and at G) from the t w o-h ump trav el- ing w a ve d o es not look like a pitc hf ork . Instead, the bifurcation curv e en ters at an oblique angle from one side only . This is b ecause the second F ourier mo de of th e linearized solution v (0) ( x, t ) = Re { z 2 , 1 ( x + t ) e it } is zero (cf. (24) ab ov e), so the fi rst order effect on th e bifu r ca- tion p arameter ρ = a 2 (0) is zero as we mov e aw a y from the t w o-hump trav eling wa v e in the direction of v (0) . The deriv ativ e of T in this d irection is also zero, so a heuristic argument based on the Liapunov-Sc hmidt reduction [GS85, Kie04] leads to an equ ation g ( ρ, T ) = 0 for the bifu rcation curve , w here ∂ g ∂ T = 0 and ∂ g ∂ ρ = 0 at the bifurcation. By con trast, th e first F our ier co efficient of v (0) ( · , 0) is non-zero and we do obtain a pitc hfork bifurcation at F (and G) when we p lot a 1 (0) vs. T , as w as seen in Figure 4 . It turn s out that the p ath of a 2 (0) vs. T fr om F to B is identica l to the one from F to C; whic h one-h ump stationary solution w e end up w ith dep ends on wh ether w e p erturb the tra v eling wa v e in the d irection of + v (0) or − v (0) . Ho wev er, there is another direction w e can mo v e wh ile k eeping G tot zero (with k = 2 in (51)), namely v (1) ( x, t ) = Im { z 2 , 1 ( x + t ) e it } . This direction breaks the ev en symmetry of the initia l condition, but the even F ourier mo des still satisfy b k (0) = 0 and ∂ t a k (0) = 0; h ence, the p enalt y function ϕ do es not exclude this direction wh en k = 2 in (51). Dep endin g on whether w e p erturb in th e + v (1) or − v (1) direction, we end u p at either the one-hump stationary solution E, w ith maximum at x = 3 π / 2, or D, with maxim um at x = π / 2. Th is sho ws that our c hoice of p enalt y function ϕ in (51) do es not rule out non-trivial solutions with asymmetric initial cond itions: the solutions on the path from (F or G) to (D or E) are all asymmetric at t = 0; ho w ev er, these solutions are related to the ones on the path fr om (F or G) to (B or C) b y a phase shift in space. W e h a v e not foun d an y p er io dic s olutions that cannot b e made symmetric at t = 0 by such a phase shift. In Figure 7, we sho w the tra jectories of the second F ourier mo de in th e complex plane. The marke rs lab eled H0, J0, etc. again corresp ond to th e solutions plotted in Figure 3. Un- lik e the first F ourier mo d e, these tr a j ectories are not exactly circular — bu t b y cur v e fi tting w e determined they are epitro c hoids, (r esem bling Ptolem y’s mo del of planetary motion, or “spirograph” tra j ectories), of the form c 2 ( t ) = c 20 + c 2 , − 1 e iω t + c 2 , − 2 e i 2 ωt , ( ω = 2 π /T ) , (54) where the coefficients c 2 j (and ω ) dep end on the bifurcation parameter ρ . More generally , b y curve fitting our numerical solutions, we ha v e disco v ered a rather amazing pr op ert y of solutions on this p ath: the k th F ourier mo de is found to b e of the form c k ( t ) = 0 X j = − k c k j e − ij ω t , ( k ≥ 0 , ω = 2 π /T ) , (55) where c k j ∈ R and c − k ( t ) = c k ( t ). The general form of solutions on other paths connecting higher order b if u rcations is similar, and is describ ed in th e f ollo w-up pap er [A W]. T he four parameter f amily of non-trivial solutions is also nicely represented in this figur e, wh ere the parameters are the mean, the furthest p oin t on the epitro c hoid, a global rotation ab out the origin, and the c hoice of whic h p oin t on the epitro c hoid corresp ond s to t = 0. Note that 24 Da vid M. Am brose and Jon Wilk ening 2.2 2.4 2.6 2.8 3 3.2 3.4 −1.5 −1 −0.5 0 0.5 1 1.5 A B C D E F G H0 J0 K0 constant solution one−hump stationary, ±β one−hump stationary ( ±π /2 phase shift) two hump traveling two hump traveling Extrema of second Fourier mode vs. Period T a 2 Figure 6: Bifurcation from the constan t solution to a tw o-h ump tra vel ing w a v e and the path of non-trivial solutions connecting th ese to v arious one-h ump stationary solutions. −1.5 −1 −0.5 0 0.5 1 1.5 −1.5 −1 −0.5 0 0.5 1 1.5 Trajectories of second Fourier mode a 2 b 2 B,C D,E G F K0 K10 J0 K1 K2 K19 J5 H0 Figure 7: The tra jectories of the second F ourier m o de in the complex plane are epitro c hoids; see Equation (54). The mark ers corresp ond to the solutions plotted in Figure 3. Time-P erio dic Solutions of the Benjamin-Ono Equation 25 a spatial phase shift of the initial condition by θ leads to a rotation of a tra j ectory in this figure clo ckwise b y 2 θ , so the north and south lob es of circles in Figure 5 colla pse on to the w est family of epitro c hoids (around D and E) in Figure 7 w hile the w est and east lob es of Figure 5 collapse on to the east f amily here. 6 Exact Solutions The disco v ery th at the F ourier mo d es execute Ptole maic orbits of the form (55) led us to exp ect that it migh t b e p ossible to write do wn the solution in closed form. In this section, w e sh o w how to do this for the path of n on-trivial solutions conn ecting the one-h ump stationary solution to the tw o-h ump tra v eling wa v e. W e ha v e no w learned of several other metho ds for finding exact solutions of Benjamin-Ono, n otably the bilinear formalism used b y Satsum a and Ishimori [SI79] and Matsuno [Mat04 ] to construct multi-perio dic solutions; the reduction b y Case [Cas79] of the ODE (9) to a system sh o wn by Moser to b e completely in tegrable; and the appr oac h of Dobrokhoto v and K ric hev er [DK91] using the theory of finite zone integ ration to constr u ct multi- ph ase solutions. Ou r approac h highligh ts a feature of these solutions that has not b een discuss ed previously , namely th at the F our ier mo des of these solutions turn out to b e p ow er sums of p article tra jectories β l ( t ) in the unit disk ∆ ⊂ C whose elemen tary symmetric fu n ctions execute simp le circular orbits in the complex plane. W e start with the observ ation that the meromorphic solutions u ( x, t ) = α 0 + N X l =1 u β l ( t ) ( x ) , β l ( t ) ∈ ∆ satisfying (11), (56) ha v e the p rop erty that the first N + 1 F ourier mo d es c k ( t ) of u ( x, t ) are closely relate d to the tra jectories of the β l . S p ecifically , α 0 = c 0 is needed to write do wn the ODE (11), and w e ha ve β 1 ( t )+ · · · + β N ( t ) = s 1 ( t ) , 2 s 1 ( t ) = c 1 ( t ) , β 2 1 ( t )+ · · · + β 2 N ( t ) = s 2 ( t ) , 2 s 2 ( t ) = c 2 ( t ) , · · · β N 1 ( t )+ · · · + β N N ( t ) = s N ( t ) , 2 s N ( t ) = c N ( t ) . (57) It is a s tandard theorem of alge br a [vd W70] that the element ary symmetric functions σ j = X l 1 < ···
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment