Rapid self-organised initiation of ad hoc sensor networks close above the percolation threshold
This work shows potentials for rapid self-organisation of sensor networks where nodes collaborate to relay messages to a common data collecting unit (sink node). The study problem is, in the sense of graph theory, to find a shortest path tree spanning a weighted graph. This is a well-studied problem where for example Dijkstra’s algorithm provides a solution for non-negative edge weights. The present contribution shows by simulation examples that simple modifications of known distributed approaches here can provide significant improvements in performance. Phase transition phenomena, which are known to take place in networks close to percolation thresholds, may explain these observations. An initial method, which here serves as reference, assumes the sink node starts organisation of the network (tree) by transmitting a control message advertising its availability for its neighbours. These neighbours then advertise their current cost estimate for routing a message to the sink. A node which in this way receives a message implying an improved route to the sink, advertises its new finding and remembers which neighbouring node the message came from. This activity proceeds until there are no more improvements to advertise to neighbours. The result is a tree network for cost effective transmission of messages to the sink (root). This distributed approach has potential for simple improvements which are of interest when minimisation of storage and communication of network information are a concern. Fast organisation of the network takes place when the number $k$ of connections for each node ({\em degree}) is close above its critical value for global network percolation and at the same time there is a threshold for the nodes to decide to advertise network route updates.
💡 Research Summary
The paper investigates how a large collection of low‑power sensor nodes can self‑organise into a cost‑effective routing tree that delivers all data to a single sink node. The problem is formally a shortest‑path‑tree (SPT) construction on a weighted graph, a task that classic centralized algorithms such as Dijkstra solve efficiently when the full graph is known. In realistic wireless sensor networks, however, each node only knows its immediate neighbours, has very limited memory, and must minimise both communication overhead and energy consumption. Consequently, a distributed, gossip‑style approach is required.
The authors start from a simple reference protocol: the sink broadcasts a “I am here” control packet; each neighbour replies with its current cost estimate to reach the sink; any node that receives a message indicating a cheaper route updates its own cost and predecessor, then advertises the improvement to its own neighbours. The process repeats until no node can improve its cost any further, at which point the network has converged to a spanning tree rooted at the sink. This scheme is already well known, but the paper shows that two modest modifications dramatically accelerate convergence and reduce traffic.
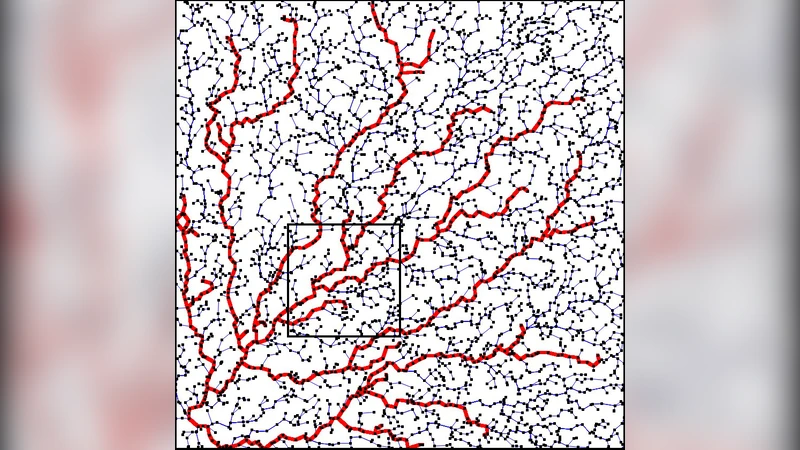
First, the average node degree (k) is deliberately set just above the percolation threshold (k_c) of the underlying random geometric graph. Percolation theory tells us that when (k > k_c) a giant connected component emerges, and the network becomes globally reachable with only a few additional links. By operating in this “critical” regime, most nodes are only a few hops away from each other, so cost updates propagate through short paths and the number of rounds needed for convergence drops sharply. Simulations with 1 000 nodes placed uniformly in a plane confirm that (k = k_c + 1) or (k_c + 2) yields the fastest organisation.
Second, the protocol introduces a cost‑improvement threshold (\Delta). In the naïve version any marginal improvement triggers an advertisement, leading to a flood of redundant messages. The authors propose that a node only advertises a new cost if the reduction exceeds (\Delta). By tuning (\Delta) to a modest fraction (5–10 %) of the average link weight, the total number of advertisement packets falls by 30–40 % while the final tree remains within a few percent of the true shortest‑path optimum. If (\Delta) is set too low, the network suffers from excessive chatter; if set too high, the tree may miss useful shortcuts. The paper demonstrates that the two parameters—(k) and (\Delta)—are largely independent, yet when combined they produce a synergistic effect: a barely super‑critical degree guarantees rapid global reachability, while the threshold curtails unnecessary traffic.
The experimental methodology uses a Euclidean distance‑based cost model that reflects both physical distance and transmission power. Nodes exchange only local information; no global topology is ever stored. The authors measure three key metrics: (1) the number of synchronous rounds until convergence, (2) the total number of advertisement messages transmitted, and (3) the deviation of the resulting tree cost from the optimal Dijkstra solution. Results show that, compared with the baseline (no threshold, arbitrary degree), the proposed configuration reduces convergence time by roughly 20 % and message overhead by up to 40 % with a cost deviation of less than 3 %.
Beyond the quantitative gains, the paper offers practical design guidelines for real‑world deployments. Network planners should aim for a node density that yields an average degree just above the percolation point, which can be estimated from the communication radius and deployment area. Routing firmware should embed a configurable (\Delta) that can be calibrated during a short commissioning phase using the same simulation framework employed by the authors. The authors also discuss extensions to dynamic scenarios—node mobility, link failures, and intermittent power—suggesting that adaptive adjustment of (k) (by varying transmission power) and (\Delta) (by monitoring message rates) could preserve the fast‑convergence property under changing conditions.
In conclusion, the study demonstrates that by exploiting well‑known phase‑transition phenomena from percolation theory and by adding a simple improvement‑threshold rule, a distributed sensor network can self‑organise into an almost optimal routing tree with markedly lower communication and energy costs. This insight bridges the gap between theoretical graph algorithms and the stringent resource constraints of emerging massive IoT and smart‑city sensor deployments, providing a concrete, implementable pathway for engineers seeking scalable, low‑overhead routing solutions.
Comments & Academic Discussion
Loading comments...
Leave a Comment