A reconstruction algorithm for single-particle diffraction imaging experiments
We introduce the EMC algorithm for reconstructing a particle’s 3D diffraction intensity from very many photon shot-noise limited 2D measurements, when the particle orientation in each measurement is unknown. The algorithm combines a maximization step (M) of the intensity’s likelihood function, with expansion (E) and compression (C) steps that map the 3D intensity model to a redundant tomographic representation and back again. After a few iterations of the EMC update rule, the reconstructed intensity is given to the difference-map algorithm for reconstruction of the particle contrast. We demonstrate reconstructions with simulated data and investigate the effects of particle complexity, number of measurements, and the number of photons per measurement. The relatively transparent scaling behavior of our algorithm provides a first estimate of the data processing resources required for future single-particle imaging experiments.
💡 Research Summary
The paper introduces the Expansion‑Maximization‑Compression (EMC) algorithm, a novel reconstruction framework designed for single‑particle diffraction imaging (SPI) experiments where each 2‑D diffraction pattern is recorded at an unknown particle orientation and contains only a few photons due to shot‑noise limited conditions. The central challenge in SPI is to recover the three‑dimensional (3‑D) diffraction intensity I(q) from a massive collection of such noisy, orientation‑unknown frames. Traditional approaches either require a separate orientation‑estimation step or depend on high photon counts per frame, both of which become impractical for the high‑throughput data streams expected from next‑generation X‑ray free‑electron lasers (XFELs).
EMC tackles this problem by embedding the orientation inference directly into an Expectation‑Maximization‑like loop that alternates three operations:
-
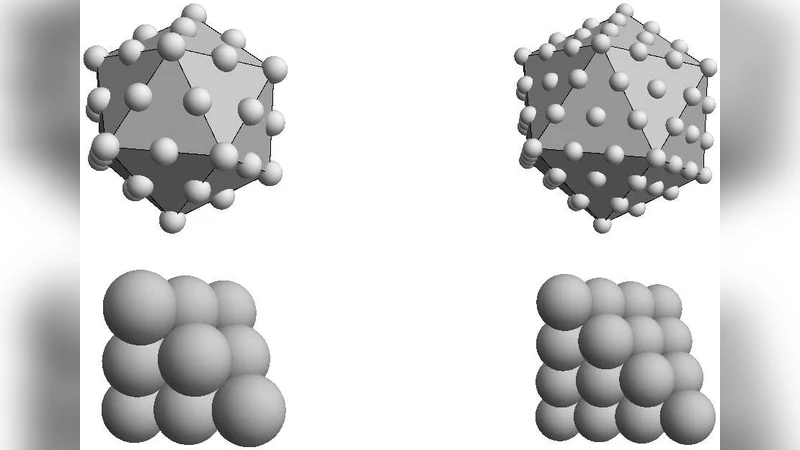
Expansion (E) – The current 3‑D intensity model is rotated into a discrete set of candidate orientations {Rj}. For each orientation the model is projected onto the detector plane, producing a redundant tomographic representation: a collection of 2‑D slices that together cover the entire orientation space. This step is implemented with fast Fourier‑based interpolation, ensuring O(N log N) scaling with the number of voxels N.
-
Maximization (M) – Using a Poisson likelihood appropriate for photon‑count data, the algorithm evaluates the probability that each measured frame i arose from each candidate orientation Rj. The weight wij(Rj) ∝ exp
Comments & Academic Discussion
Loading comments...
Leave a Comment