Singularities on the boundary of the stability domain near 1:1 resonance
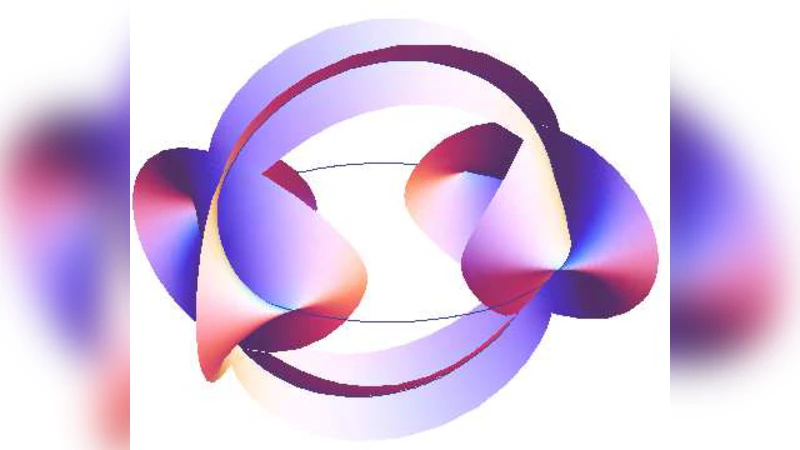
We study the linear differential equation x’ = Lx in 1:1 resonance. That is, x in R^4 and L is a 4 by 4 matrix with a semi-simple double pair of imaginary eigenvalues (ib,-ib,ib,-ib). We wish to find all perturbations of this linear system such that the perturbed system is stable. Since linear differential equations are in one to one correspondence with linear maps we translate this problem to gl(4,R). In this setting our aim is to determine the stability domain and the singularities of its boundary. The dimension of gl(4,R) is 16, therefore we first reduce the dimension as far as possible. Here we use a versal unfolding of L ie a transverse section of the orbit of L under the adjoint action of Gl(4,R). Repeating a similar procedure in the versal unfolding we are able to reduce the dimension to 4. A 3-sphere in this 4-dimensional space contains all information about the neighborhood of L in gl(4,R). In this 3-sphere the boundary of the stability domain is a surface with singularities: transverse self-intersections, Whitney umbrellas and an intersection of self-intersections where the surface has a self-tangency.
💡 Research Summary
The paper investigates the stability of small perturbations of a four‑dimensional linear system that exhibits a 1:1 resonance, i.e. a double pair of purely imaginary eigenvalues ± i b. The authors start by translating the differential equation x′ = Lx into the language of the Lie algebra gl(4,ℝ), where L is a 4 × 4 real matrix with a semi‑simple spectrum {i b, −i b, i b, −i b}. The central problem is to describe the set of matrices L′ close to L for which all eigenvalues have negative real parts (the stability domain) and to characterize the singularities of its boundary.
Because gl(4,ℝ) has dimension 16, a direct analysis is infeasible. The authors therefore employ a versal unfolding of L, which is a transversal slice to the GL(4,ℝ)‑adjoint orbit of L. The orbit consists of all matrices conjugate to L and has dimension 8; its complement (the normal space) also has dimension 8 and contains the directions that actually affect stability. By computing the centralizer of L (the set of matrices commuting with L) and using invariant theory, the authors reduce the normal space further. Exploiting the remaining symmetries (real rotations and scaling) they obtain a minimal parametrisation with four real parameters (a, b, c, d).
These four parameters can be normalised to lie on the unit 3‑sphere S³ in ℝ⁴, because any non‑zero scalar multiple of a perturbation yields the same qualitative stability properties. Consequently, the neighbourhood of L in gl(4,ℝ) is represented by points on S³, and the stability domain becomes a subset of this sphere. The authors compute the characteristic polynomial of the perturbed matrix in terms of (a, b, c, d) and apply the Routh–Hurwitz criteria to obtain explicit inequalities that define the stable region on S³.
The main geometric result concerns the boundary surface Σ = ∂(stability domain) ⊂ S³. Σ is shown to be a two‑dimensional algebraic surface with three distinct types of singularities:
-
Transverse self‑intersections – two locally distinct sheets of Σ intersect transversally. In dynamical terms this corresponds to two independent instability mechanisms becoming simultaneously active.
-
Whitney umbrellas – a classic pinch‑point singularity where one parameter vanishes and the remaining parameters satisfy a quadratic relation (e.g., a² = bc). This reflects a codimension‑two bifurcation in which a pair of complex conjugate eigenvalues passes through the imaginary axis and then splits into a real pair.
-
Self‑tangency of intersecting sheets – points where two self‑intersection curves meet and their tangent directions coincide, producing a higher‑order contact. This indicates a degenerate situation where three or more bifurcation curves coalesce.
These singularities are not artefacts of the chosen coordinates; they are intrinsic to the stability boundary of any 1:1 resonant system under generic perturbations. The paper provides explicit normal forms for each singularity, illustrating how small changes in the perturbation parameters move the system across Σ and trigger the corresponding bifurcations.
Beyond the local classification, the authors discuss the broader implications of their method. The combination of an adjoint‑orbit reduction and a versal unfolding yields a systematic way to isolate the essential dynamical degrees of freedom in high‑dimensional linear systems with multiple imaginary eigenvalues. The resulting low‑dimensional picture (a 3‑sphere with a well‑understood singular surface) makes it possible to visualise stability loss, to compute bifurcation diagrams, and to design control strategies that avoid the singular regions.
Finally, the paper suggests that the same approach can be applied to other resonances (e.g., 1:2, 1:3) and to nonlinear extensions where the linear part exhibits a 1:1 resonance. In such contexts the identified singularities of the linear stability boundary often persist as organizing centres for the full nonlinear dynamics, guiding the emergence of periodic orbits, quasi‑periodic tori, or chaotic attractors. The work therefore bridges linear algebraic normal‑form theory, singularity theory, and applied stability analysis, offering a clear geometric framework for understanding how small perturbations can destabilise systems poised at a 1:1 resonance.
Comments & Academic Discussion
Loading comments...
Leave a Comment