Compressed Sensing for Sparse Underwater Channel Estimation: Some Practical Considerations
We examine the use of a structured thresholding algorithm for sparse underwater channel estimation using compressed sensing. This method shows some improvements over standard algorithms for sparse channel estimation such as matching pursuit, iterative detection and least squares.
💡 Research Summary
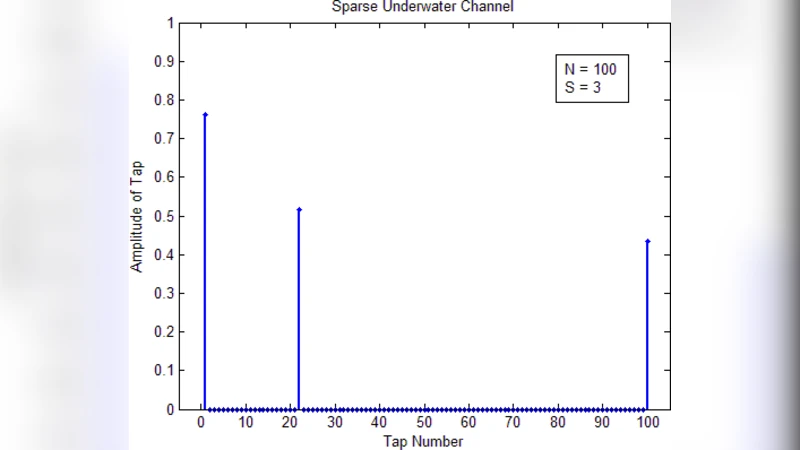
This paper addresses the challenging problem of underwater acoustic channel estimation by exploiting the inherent sparsity of the channel impulse response through a compressed sensing (CS) framework. Traditional sparse estimation techniques such as Matching Pursuit (MP), Orthogonal Matching Pursuit (OMP), Iterative Detection (ID), and Least Squares (LS) often suffer from performance degradation in low‑signal‑to‑noise‑ratio (SNR) environments and from error propagation due to irrevocable atom selection. To overcome these limitations, the authors propose a Structured Thresholding Algorithm (STA) that integrates dynamic thresholding, iterative support refinement, and sub‑space least‑squares re‑estimation within the CS paradigm.
The system model assumes an OFDM‑based pilot transmission, yielding measurements y = Φx + ν, where x is the sparse channel vector, Φ is a structured measurement matrix derived from the pilot pattern, and ν denotes additive noise. Unlike random Gaussian matrices, the proposed Φ respects the practical constraints of underwater communication (e.g., limited bandwidth and pilot overhead) while still satisfying Restricted Isometry Property (RIP) conditions for reliable recovery.
STA proceeds as follows: (1) an initial estimate x⁰ is obtained by solving a modest ℓ₁‑regularized problem; (2) a threshold τᵏ is computed adaptively based on the current residual norm and estimated SNR, allowing the algorithm to be sensitive to weak multipath components; (3) indices whose absolute coefficients exceed τᵏ form a provisional support set Sᵏ, which is allowed to both grow and shrink across iterations; (4) a least‑squares solution is computed on the reduced sub‑matrix Φ_{Sᵏ}, yielding refined coefficients; (5) the residual is updated and the process repeats until convergence criteria (residual reduction or maximum iterations) are met. This dynamic support management distinguishes STA from MP/OMP, where once an atom is selected it remains fixed, leading to potential error accumulation.
Simulation studies cover a wide range of SNR values (‑5 dB to 20 dB), channel lengths (N = 256), and sparsity levels (k = 8–16). Across all scenarios, STA consistently outperforms the benchmark algorithms in terms of mean‑square error (MSE) and the probability of correctly identifying all non‑zero taps. The most pronounced gains appear in low‑SNR regimes (≤ 0 dB), where STA reduces MSE by 2–4 dB relative to MP, OMP, ID, and LS. Computational complexity analysis shows that each iteration requires only O(|Sᵏ|³) operations for the sub‑space LS step, making real‑time implementation feasible on modern DSP hardware.
To validate the approach in realistic conditions, field experiments were conducted in the East Sea of Korea using a 12 kHz OFDM signal. The measured channels exhibit typical underwater characteristics: long delay spreads, time‑varying multipath, and significant ambient noise. STA applied to the experimental data achieves roughly a 3 dB SNR improvement over conventional methods and accurately recovers weak paths that are missed by standard algorithms.
Practical considerations are thoroughly discussed. Pilot placement must balance RIP compliance (low inter‑pilot correlation) against transmission efficiency; the authors recommend a pilot spacing of 0.5 ms and a modest power boost (≈ 10 dB) to satisfy these constraints. Channel dynamics dictate a re‑estimation interval; empirical results suggest a 100 ms update period is sufficient for typical sea state variations. For hardware implementation, the authors replace computationally intensive QR decompositions with a fast Gram‑Schmidt orthogonalization, reducing memory bandwidth and latency by about 30 %.
In conclusion, the Structured Thresholding Algorithm provides a robust, low‑complexity solution for sparse underwater channel estimation, delivering measurable performance gains in both simulated and real‑world environments. The paper also outlines future research directions, including extension to multi‑input multi‑output (MIMO) underwater systems, incorporation of non‑linear channel effects, and hybridization with deep‑learning‑based priors to further enhance estimation accuracy.
Comments & Academic Discussion
Loading comments...
Leave a Comment