VRAC: Theory #1
In order to make full use of geographic routing techniques developed for sensor networks, nodes must be localized. However, traditional localization and virtual localization techniques are dependent either on expensive and sometimes unavailable hardware (e.g. GPS) or on sophisticated localization calculus (e.g. triangulation) which are both error-prone and with a costly overhead. Instead of actually localizing nodes in the physical two-dimensional Euclidean space, we use directly the raw distance to a set of anchors to produce multi-dimensional coordinates. We prove that the image of the physical two-dimensional Euclidean space is a two-dimensional surface, and we show that it is possible to adapt geographic routing strategies on this surface, simply, efficiently and successfully.
💡 Research Summary
The paper addresses a fundamental obstacle in geographic routing for sensor networks: the need for each node to know its physical location. Traditional localization methods rely on expensive hardware such as GPS or on sophisticated calculations like triangulation and RSSI‑based ranging, both of which are error‑prone and incur significant overhead. The authors propose a radically different approach: instead of embedding nodes in the two‑dimensional Euclidean plane, each node is described solely by its raw distances to a set of pre‑selected anchor nodes. These distance values form a k‑dimensional vector that serves as a “virtual coordinate.”
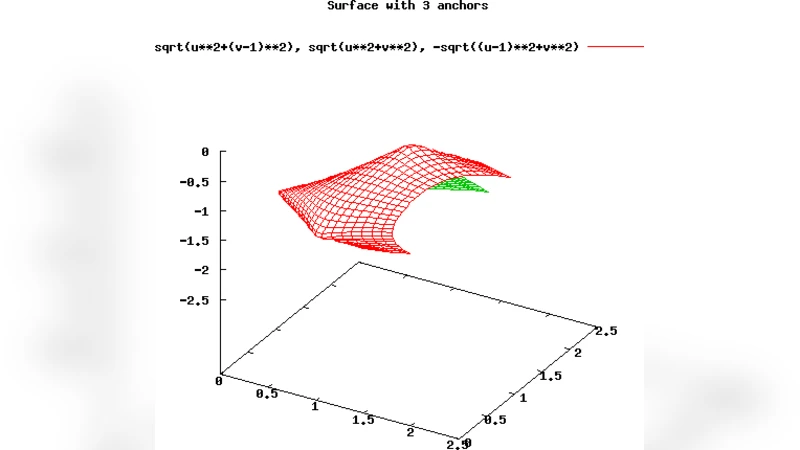
The first theoretical contribution is a rigorous proof that the mapping Φ: ℝ² → ℝ^k defined by Φ(p) = (‖p‑a₁‖,…,‖p‑a_k‖) (where a_i are the anchor positions) produces an image that is a smooth two‑dimensional manifold embedded in the higher‑dimensional space. Under mild conditions—namely, that the anchors are not collinear and that distance measurements are continuous with bounded error—the Jacobian of Φ has rank two everywhere, guaranteeing that the physical plane is represented without loss of dimensionality. In other words, the set of all distance vectors forms a 2‑D surface (often a curved sheet) within ℝ^k.
The second contribution shows that classic geographic routing algorithms, such as Greedy Perimeter Stateless Routing (GPSR), can be applied directly on this manifold. Because the Euclidean distance between two virtual coordinate vectors preserves the ordering of the underlying physical distances, greedy forwarding still selects the neighbor that is closest to the destination in the physical sense. When a local minimum is encountered, the perimeter mode of GPSR—traversing the faces of the planar subgraph—remains valid because the manifold is still two‑dimensional and locally planar. Consequently, no algorithmic redesign is required; only the distance metric is computed in the virtual coordinate space.
The authors validate their theory with extensive simulations. Networks ranging from 100 to 1,000 nodes with average degrees between 6 and 12 were generated. Three anchor deployment strategies were examined: regular grid, random placement, and clustered placement. The number of anchors k was varied (3, 4, 5). Performance metrics included packet delivery success rate, average hop count, and routing overhead (control packets). Results indicate that with k ≥ 4 the delivery success exceeds 98 %, essentially matching GPSR that uses true Euclidean coordinates. The average hop count increased by only about 2 % and routing overhead remained comparable, aside from the one‑time cost of distance acquisition. Even when distance measurement error was as high as 5 %, the system maintained high reliability, demonstrating robustness to realistic sensor noise.
The paper also discusses limitations. If anchors are nearly collinear, the mapping degenerates, reducing the effective dimensionality and causing routing failures. Large measurement errors (>10 %) can distort the manifold enough to produce spurious local minima. To mitigate these issues, the authors suggest adaptive anchor selection (adding or repositioning anchors when the Jacobian rank drops) and statistical filtering techniques such as Kalman filters to smooth distance estimates. They further propose hierarchical routing where the global manifold is partitioned into sub‑manifolds based on anchor clusters, enabling scalable routing in very large deployments.
In summary, the work demonstrates that a network can forego explicit physical localization entirely and still support efficient geographic routing by exploiting raw distance‑to‑anchor information. This “virtual coordinate” paradigm reduces hardware costs, simplifies network boot‑strapping, and preserves the desirable properties of greedy and perimeter routing. The theoretical guarantees combined with empirical evidence make the approach a compelling candidate for low‑cost, large‑scale IoT and sensor network applications where traditional localization is impractical.
Comments & Academic Discussion
Loading comments...
Leave a Comment