Tutorial on ABC rejection and ABC SMC for parameter estimation and model selection
In this tutorial we schematically illustrate four algorithms: (1) ABC rejection for parameter estimation (2) ABC SMC for parameter estimation (3) ABC rejection for model selection on the joint space (4) ABC SMC for model selection on the join…
Authors: Tina Toni, Michael P. H. Stumpf
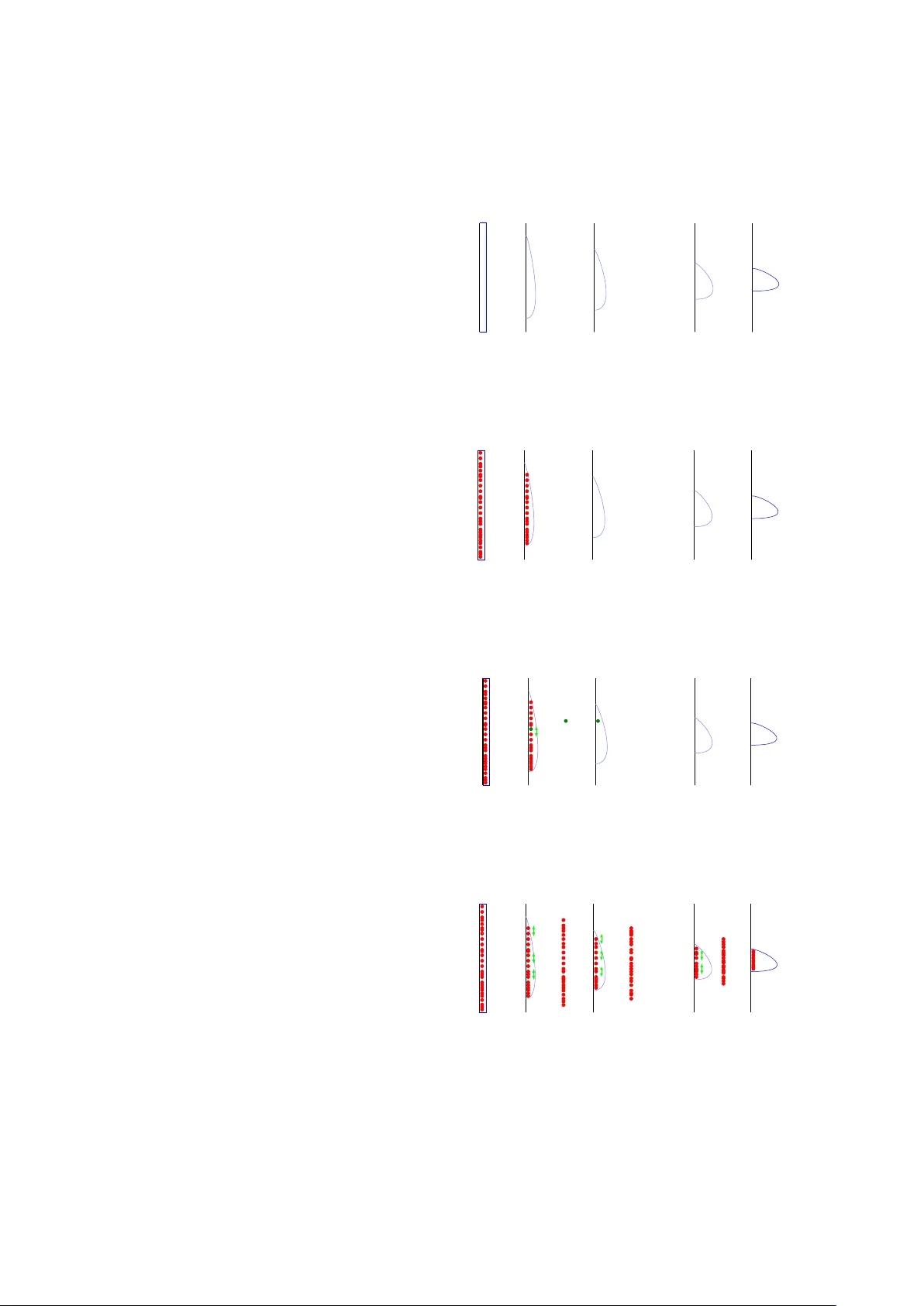
T utorial on ABC rejection and ABC SMC for parameter estimation and mo del selection Tina T oni, Mic hael P . H. Stumpf ttoni@imp erial.ac.uk, m.stumpf@imp erial.ac.uk In this tutorial w e sc hematically illustrate four algorithms: 1. ABC rejection for parameter estimation [1, 2], 2. ABC SMC for parameter estimation [3, 4, 5], 3. ABC rejection for mo del selection on the join t space [6], 4. ABC SMC for mo del selection on the join t space [7]. W e suggest to read this tutorial from the b eginning. W e start with a detailed explanation of the ABC rejection algorithm, which later helps to understand ABC SMC as it is based on the same concepts. Also, b oth mo del selection algorithms are closely related to parameter estimation algorithms and it is therefore helpful to understand those first. This tutorial forms a part of the supplemen tary material of the pap er ”Simulation- based mo del selection for dynamical systems in systems and population biology , Bioinformatics, 26 (1), 104-110, 2010” (T. T oni, M. P . H. Stumpf ). 1 ABC rejection (a) W e define a prior distribution P ( θ ) and we w ould like to approximate the p osterior distribution P ( θ | D 0 ). W e start by sampling a parameter θ ∗ from the prior distribution. W e call this sampled parameter a p article . (b) W e simulate a data set D ∗ according to some sim ulation framework f ( D | θ ∗ ). In our examples w e use different sim ulation framew orks. If we sim ulate a deterministic dynamical mo del, we add some noise at the time points of interest. If w e sim ulate a sto c hastic dynamical mo del, we do not add an y additional noise to the tra jectories. W e compare the simulated data set D ∗ (circles) to the exp erimen tal data D 0 (crosses) using a distance function, d , and tolerance ; if d ( D 0 , D ∗ ) ≤ , we accept θ ∗ . The tolerance ≥ 0 is the desired lev el of agreemen t b et ween D 0 and D ∗ . (c) The particle θ ∗ is accepted b ecause D ∗ and D 0 are sufficien tly close. (d) W e sample another parameter θ ∗ from the prior distribution and sim ulate a corresp onding dataset D ∗ . In this case D ∗ and D 0 are very differen t and we reject the particle (we ”throw it a wa y”). (e) W e rep eat the whole pro cedure until N particles hav e b een accepted. They repre- sen t a sample from P ( θ | d ( D 0 , D ∗ ) ≤ ), which appro ximates the posterior distribution. If is sufficien tly small then the distribution P ( θ | d ( D 0 , D ∗ ) ≤ ) will b e a go od approxi- mation for the “true” p osterior distribution, P ( θ | D 0 ). (f ) Man y particles w ere rejected in the pro cedure, for which we hav e sp en t a lot of computational effort for sim ulation. ABC rejection is therefore computationally ineffi- cien t. W e can use ABC SMC to reduce the computational cost. ABC fo r dynamical systems ABC framew o rk fo r dynamical systems Prior Posterio r P ( θ ) P ( θ | D 0 ) x x x x time o o o o o o o o Tina T oni ABC SMC 26/06/2009 3 / 3 (a) ABC fo r dynamical systems ABC framew o rk fo r dynamical systems Prio r P osterio r P ( θ ) P ( θ | D ) x x x x time o o o o o o o o Tina T oni ABC SMC 26/06/2009 4 / 24 (b) ABC fo r dynamical systems ABC framew o rk fo r dynamical systems Prior Posterio r P ( θ ) P ( θ | D 0 ) x x x x time o o o o o o o o Tina T oni ABC SMC 26/06/2009 3 / 3 (c) ABC fo r dynamical systems ABC framew o rk fo r dynamical systems Prior Posterio r P ( θ ) P ( θ | D 0 ) x x x x time o o o o o o o o Tina T oni ABC SMC 26/06/2009 3 / 3 (d) ABC framew o rk fo r dynamical systems Prior P osterior P ( θ ) P ( θ | D 0 ) x x x x time o o o o o o o o August 2, 2009 1 / 1 (e) ABC fo r dynamical systems ABC framew o rk fo r dynamical systems Prio r P osterio r P ( θ ) P ( θ | D ) x x x x time o o o o o o o o Tina T oni ABC SMC 26/06/2009 4 / 24 (f ) Figure 1: Schematic r epresentation of ABC re- jection. 2 ABC SMC (T oni et al. , 2009) (a) As in ABC rejection, we define a prior distribution P ( θ ) and w e w ould like to appro xi- mate a p osterior distribution P ( θ | D 0 ). In ABC SMC we do this sequentially by constructing in termediate distributions, whic h con v erge to the posterior distribution. W e define a tolerance sc hedule 1 > 2 > . . . T ≥ 0. (b) W e sample particles from a prior distribu- tion until N particles hav e b een accepted (hav e reac hed the distance smaller than 1 ). F or all accepted particles w e calculate w eigh ts (see [4] for formulas and deriv ation). W e call the sample of all accepted particles ”P opulation 1”. (c) W e then sample a particle θ ∗ from popu- lation 1 and p erturb it to obtain a p erturb ed particle θ ∗∗ ∼ K ( θ | θ ∗ ), where K is a p er- turbation kernel (for example a Gaussian random walk). W e then simulate a dataset D ∗ ∼ f ( D | θ ∗∗ ) and accept the particle θ ∗∗ if d ( D 0 , D ∗∗ ) ≤ 2 . W e rep eat this un til we ha ve accepted N particles in p opulation 2. W e calculate w eights for all accepted particles. (d) W e rep eat the same procedure for the follo wing p opulations, until we hav e accepted N particles of the last p opulation T and calculated their weigh ts. P opulation T is a sample of particles that approximates the p osterior distribution. ABC SMC is computationally muc h more efficien t than ABC rejection (see [4] for comparison). ABC SMC (Sequential Monte Ca rlo) Intermediate Distributions Prior Posterio r 1 2 . . . T − 1 T P opulation 1 P opulation 2 P opulation T Tina T oni, Michael Stumpf ABC dynamical sy stems 03/07/08 1 / 1 (a) ABC SMC (Sequential Monte Ca rlo) Intermediate Distributions Prior Posterio r 1 2 . . . T − 1 T Population 1 P opulation 2 P opulation T Tina T oni, Michael Stumpf ABC dynamical sy stems 03/07/08 1 / 1 (b) ABC SMC (Sequential Monte Ca rlo) Intermediate Distributions Prior Posterio r 1 2 . . . T − 1 T Population 1 Tina T oni, Michael Stumpf ABC dynamical sy stems 03/07/08 1 / 1 (c) ABC SMC (Sequential Monte Ca rlo) Intermediate Distributions Prior Posterio r 1 2 . . . T − 1 T Population 1 Population 2 Population T Tina T oni, Michael Stumpf ABC dynamical sy stems 03/07/08 1 / 1 (d) Figure 2: Schematic represen tation of ABC SMC. 3 ABC rejection for mo del selection ABC framew o rk fo r dynamical systems Prio r P osterio r P ( m , θ ) P ( m , θ | D 0 ) x x x x time o o o o o o o o August 2, 2009 1 / 1 (a) !"#$%&'(")*+%",-("&*.+*"/.#,*.012+3"45-., (6"$3/"$77(&,(/"&$*27'(#"40'1(6 " % 8" % 9 " % : " θ 8""""" θ :""""" θ 9 """ θ ; """ θ < """"" θ = """ θ > """" θ ?""""" θ @ """ θ 8A """ θ 88 "" θ 8: "" θ 89 "" θ 8; "" θ 8< " (b) Approximation of P(m|D 0 ) M d l 0.0 0.2 0.4 0.6 0.8 1.0 1 2 3 Model (c) Figure 3: (a) Prior and posterior distributions, P ( m, θ ) and P ( m, θ | D 0 ), are now defined on a join t model and parameter space. (b) P articles ( m, θ ) are sampled from the prior distribution and accepted/rejected according to the distance b et ween the simulated and exp erimen tal datasets. The accepted particles are shown in dark blue. (c) Six particles hav e b een accepted: one from mo del 1 and fiv e from mo del 2. The approximated marginal p osterior probability of the mo del can b e calculated as P ( m = 1 | D 0 ) = 1 6 , P ( m = 2 | D 0 ) = 5 6 , P ( m = 3 | D 0 ) = 0 6 . F or illustrative purp oses we ha ve chosen a small num b er of particles. In principle this algorithm will yield consisten t marginal p osterior model distributions for N → ∞ . 4 ABC SMC for mo del selection !"#$%&'(")*+%",-("&*.+*"/.#,*.012+3"$3/"$44(&, (/"&$*24'(#"+)"5+&6 " % 6" % 7 " % 8 " θ 6""""" θ 8""""" θ 7 """ θ 9 """ θ : """"" θ ; """ θ < """" θ =""""" θ > """ θ 6? """ θ 66 "" θ 68 "" θ 67 "" θ 69 "" θ 6: " (a) M d l Population 1 1 2 3 0.0 0.2 0.4 0.6 0.8 1.0 (b) !"#$%&'"()* +, ) ))))))) θ ,))))) ) ))))))) θ -))))) )) θ . ))))) θ / ))))))))) θ 0)))) θ 1 )))))) 23)4)2 -) 233)5)67 * 82923: ) 2 ,) 2 . ) 2 - ) 233)4)2 .) ;&2#%<)8233=) θ 3:)>?"2)@8233=) θ :A *+, B ) θ 33)5)6! *=233) 8 θ 9 θ 3:) CDD<#*E?)&DD<#*
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment