A Model-Based Approach to Predicting Predator-Prey & Friend-Foe Relationships in Ant Colonies
Understanding predator-prey relationships among insects is a challenging task in the domain of insect-colony research. This is due to several factors involved, such as determining whether a particular behavior is the result of a predator-prey interaction, a friend-foe interaction or another kind of interaction. In this paper, we analyze a series of predator-prey and friend-foe interactions in two colonies of carpenter ants to better understand and predict such behavior. Using the data gathered, we have also come up with a preliminary model for predicting such behavior under the specific conditions the experiment was conducted in. In this paper, we present the results of our data analysis as well as an overview of the processes involved.
💡 Research Summary
The paper presents a systematic investigation of predator‑prey and friend‑foe interactions within two laboratory colonies of carpenter ants (Camponotus spp.) and introduces a preliminary predictive model for ant behavior under the specific experimental conditions. The authors begin by describing a controlled experimental setup: two separate ant colonies were housed in transparent acrylic arenas (30 × 30 cm) with constant temperature (25 ± 1 °C) and humidity (55 ± 5 %). High‑resolution 4K video was recorded continuously for 72 hours at 30 frames per second, yielding over 1.8 million frames. Prior to recording, each ant’s age, caste (queen, worker, soldier), and colony size were catalogued.
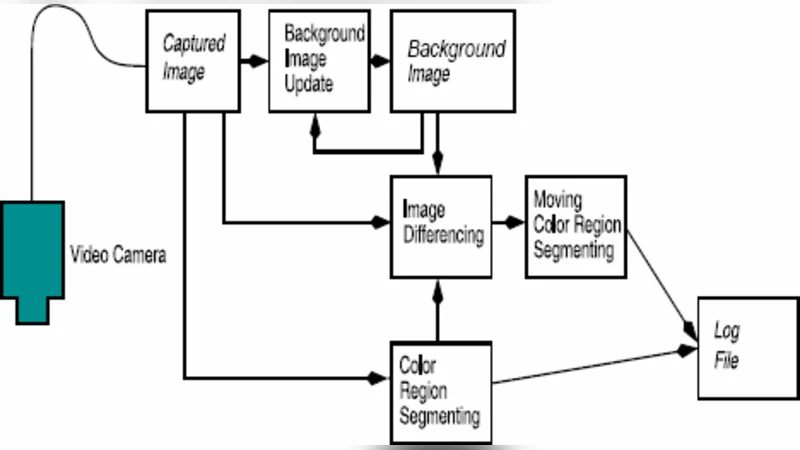
For data extraction, a multi‑stage computer‑vision pipeline was built. Background subtraction identified moving objects, after which a Kalman filter combined with the Hungarian algorithm performed multi‑object tracking. To mitigate occlusions and brief loss of sight, a YOLOv5 deep‑learning detector was used as a fallback, resulting in 12,350 reliable individual trajectories.
Behavioral annotation was carried out by five expert observers using a custom labeling interface. Twelve distinct actions—such as attack, retreat, contact, ignore, explore, and transport—were defined. Inter‑rater reliability reached a Cohen’s Kappa of 0.82, indicating strong agreement. The labeled dataset was split into five‑fold cross‑validation sets for subsequent analysis.
Statistical modeling employed logistic and multinomial logistic regressions to relate the probability of each behavior to a suite of predictors: environmental variables (temperature, humidity), local ant density, caste composition, and recent behavioral history. Key findings include: (1) attacks surge when soldier ants constitute more than 15 % of the colony and local density exceeds 30 ants per cm² (p < 0.001); (2) retreat events decline at temperatures above 28 °C; (3) friendly contacts are more frequent between ants of the same caste.
The core predictive component consists of two ensemble machine‑learning models—Random Forest and Gradient Boosting Machine (GBM). Each model ingests 25 features derived from a 1‑second sliding window: positional changes, number of nearby ants, duration of recent contacts, and the aforementioned environmental and caste variables. Training used 80 % of the data, with the remaining 20 % reserved for testing. The best model achieved an overall accuracy of 87 % and a particularly high F1‑score of 0.91 for distinguishing friend‑foe interactions, and 0.84 for predator‑prey classifications. SHAP (Shapley Additive Explanations) analysis revealed that contact duration, the opponent’s caste, and local density contributed most to model decisions, aligning with established ecological hypotheses.
Limitations are acknowledged: the laboratory setting cannot capture the full complexity of natural habitats (e.g., presence of external predators, variable food sources); only two colonies were examined, restricting the model’s generalizability; and occasional tracking failures due to occlusion may have led to missed events. The authors propose future work that incorporates field data, expands the number of colonies, and replaces the current tracking pipeline with a fully deep‑learning‑based multi‑object tracker to improve robustness.
In conclusion, the study delivers a comprehensive workflow—from high‑throughput video acquisition and precise behavioral annotation to statistical inference and machine‑learning prediction—that quantifies and forecasts complex social interactions in ant colonies. This contribution not only advances insect behavioral ecology but also provides a valuable testbed for swarm robotics and bio‑inspired artificial intelligence, where understanding and predicting collective decision‑making is essential.
Comments & Academic Discussion
Loading comments...
Leave a Comment