The lack of rotation in a moving right angle lever
📝 Original Info
- Title: The lack of rotation in a moving right angle lever
- ArXiv ID: 0805.1196
- Date: 2009-11-13
- Authors: Researchers from original ArXiv paper
📝 Abstract
The absence of any tendency toward rotation in a moving right angle lever is given a simple explanation.💡 Deep Analysis
Deep Dive into The lack of rotation in a moving right angle lever.The absence of any tendency toward rotation in a moving right angle lever is given a simple explanation.
📄 Full Content
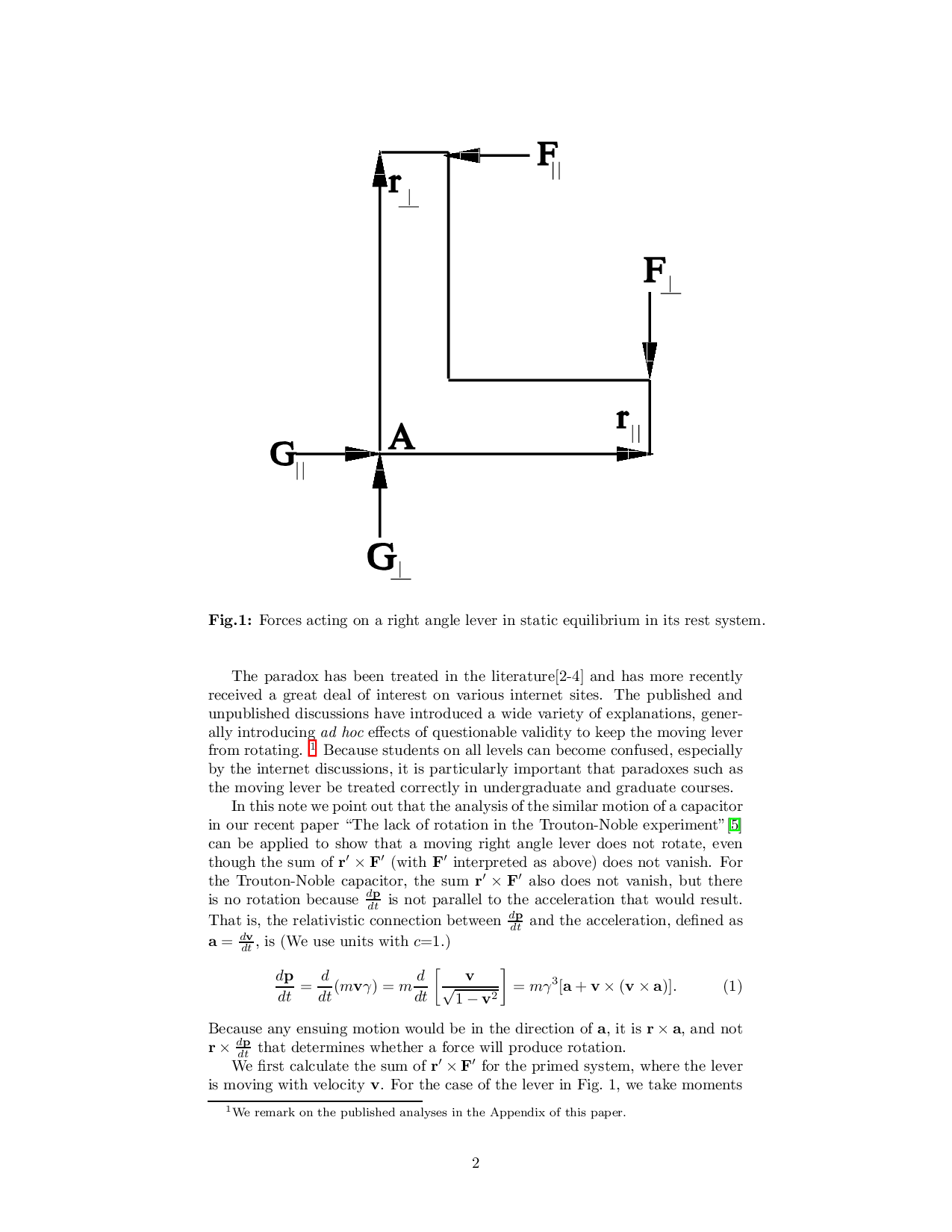
Fig. 1: Forces acting on a right angle lever in static equilibrium in its rest system.
The paradox has been treated in the literature [2][3][4] and has more recently received a great deal of interest on various internet sites. The published and unpublished discussions have introduced a wide variety of explanations, generally introducing ad hoc effects of questionable validity to keep the moving lever from rotating. 1 Because students on all levels can become confused, especially by the internet discussions, it is particularly important that paradoxes such as the moving lever be treated correctly in undergraduate and graduate courses.
In this note we point out that the analysis of the similar motion of a capacitor in our recent paper “The lack of rotation in the Trouton-Noble experiment” [5] can be applied to show that a moving right angle lever does not rotate, even though the sum of r ′ × F ′ (with F ′ interpreted as above) does not vanish. For the Trouton-Noble capacitor, the sum r ′ × F ′ also does not vanish, but there is no rotation because dp dt is not parallel to the acceleration that would result. That is, the relativistic connection between dp dt and the acceleration, defined as a = dv dt , is (We use units with c=1.)
Because any ensuing motion would be in the direction of a, it is r × a, and not r × dp dt that determines whether a force will produce rotation. We first calculate the sum of r ′ × F ′ for the primed system, where the lever is moving with velocity v. For the case of the lever in Fig. 1, we take moments about the point A. This eliminates any torque due to the forces G ⊥ or G , which act through point A. In the lever’s rest system,
corresponding to static rotational equilibrium. The coordinates transform as
where r is parallel to v and r ⊥ is perpendicular. To transform the force, we use the four-vector Minkoswki force, defined as
This leads to
Then, the sum of moments in S ′ is
which does not vanish. We now show that if there is no tendency to rotate in the lever’s rest system, there will be no tendency to rotate in the system S ′ where the lever is moving with velocity v, if “tendency to rotate” is properly interpreted. The condition for no tendency to rotate in the lever’s rest system is
The relativistic transformation equations from the rest system to S ′ for the accelerations are
The sum of moments in system S ′ is given by
Although r×a itself is not a Lorentz invariant, we see from Eq. ( 12) that if there is no turning moment in one Lorentz system, there will be no turning moment in any other Lorentz system2 There is no moving lever paradox if “tendency to rotate” is related to r × a and not r× dp dt . We see in this example, as was emphasized in Ref. [5], that caution must be observed in using pre-relativistic terms like “force” and “torque” in special relativity. Although the cross product r× dp dt is equal to the rate of change of angular momentum r× p, it is r× a that determines whether an object will have a tendency to rotate. “Force”, too, has different meanings in special relativity. We have used three different"forces" in this paper:
We remark on the published analyses in the Appendix of this paper.
Although the right angular lever has usually been treated with all vectors coplanar, our analysis can be extended to the general non-coplanar case with the same conclusion[5].
📸 Image Gallery