A novel generalization of Cliffords classical point-circle configuration. Geometric interpretation of the quaternionic discrete Schwarzian KP equation
The algebraic and geometric properties of a novel generalization of Clifford's classical C4 point-circle configuration are analysed. A connection with the integrable quaternionic discrete Schwarzian Kadomtsev-Petviashvili equation is revealed.
Authors: W.K. Schief, B.G. Konopelchenko
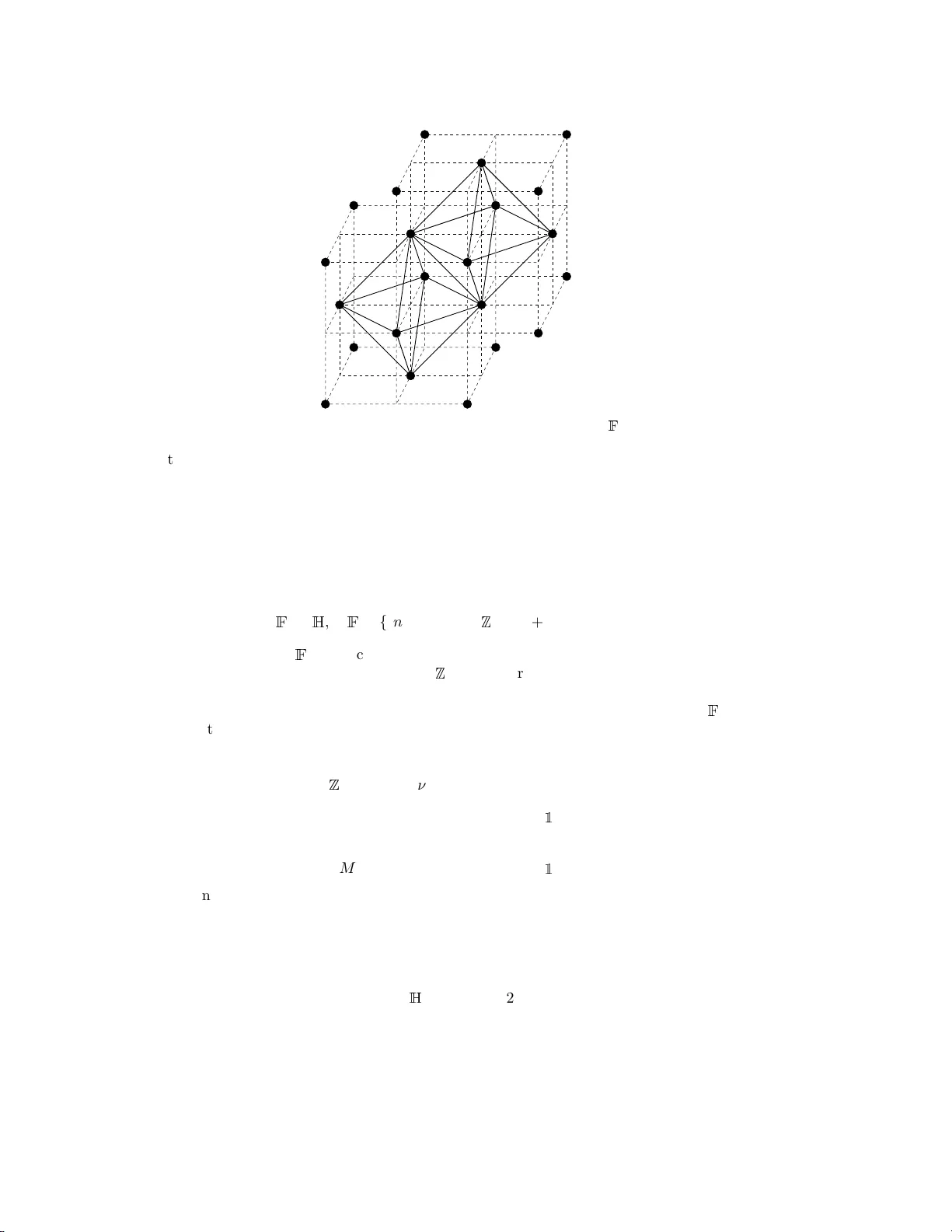
A no v el generaliz ati o n of C lifford’s classical p oin t-circle co n figuration. Geometric i n terpretatio n of the quaternioni c discre t e Sc h w arzian KP equation B y W. K. Schief 1 , 2 and B. G. Konopelchenko 3 1 Institut f¨ ur Mathematik, T e chnische Un iversit¨ at Berlin, Str aße des 17. Juni 136, D-10623 Berlin, Germany 2 Austr alian R ese ar ch Council Centr e of Exc el lenc e for Mathematics and Statistics of Complex S ystems, Scho ol of Mathematics, The University of New South Wales, Sydney, N S W 2052, Austr alia 3 Dip artimento di Fisic a, Universit` a del Salento and INFN, Sezione di L e c c e, 73100 L e c c e, Italy The algebraic and geo metr ic prop erties of a nov el generalizatio n of Clifford’s clas - sical C 4 po int -circ le configuration are a nalysed. A co nnec tion with the int egr able quaternionic discrete Sc h warzian Kadom tsev-Petviashvili equation is rev ealed. Clifford configurations; quaternions; multi-rat ios; integrable systems; discrete differen tia l geometry 1. I ntro duction In his seminal paper Cliffo r d’s chain and its analo gu es in r elation to the higher p olytop es , Longuet-Higgins (1972) asserts that ”a chain o f theo r ems ... has ex- erted a p eculiar fascinatio n for mathematicians since its disc overy by Cliffo r d in 1871” . Indeed, v arious genera lizations and analog ues in higher dimension of Clif- ford’s p oint-circle configurations C n (Clifford 18 71) asso ciated with such luminaries as de Long echamps (1877), Cox (1 891), Grace (18 98), Brown (19 54), Coxeter (19 56) and Longuet-Higg ins (1972 ) hav e b e e n reco rded and analy sed in detail. The original celebrated chain o f ‘circle theorems’ may b e stated as follows: Given four stra ight line s on a plane, the four circumcircles of the four triangles so formed ar e concurre n t in a po int Q 4 , s ay (cf. figure 1). Given five lines on a plane, by o mitting each line in turn, we obtain five corresp ond- ing p oints Q 4 and these lie on a circle C 5 , s ay . Given six lines on a plane, we obtain six co r resp onding circ le s C 5 and these ar e concurrent in a p oint Q 6 . Etc. 2 W. K. Schief and B. G. Konop elchenko 2 l 1 4 P Q 14 P 12 P 23 P 24 P 13 P 34 l 4 l 3 l Figure 1. A ‘Menelaus configuration’ Generally , giv en n copla na r lines , we obtain n corresp onding circles C n − 1 which ar e concurrent in a po int Q n or n p oints Q n − 1 which lie on a circle C n depe nding on whether n is even or o dd resp ectively . Finally , application of an inv ers io n with res pec t to a generic p oint o n the pla ne leads to a complete and symmetric configura tion of 2 n − 1 po int s and 2 n − 1 circles with n p oints on every circle and n circles through every p oint. The firs t theorem a sso ciated with four straig h t lines immediately de mo nstrates that there e x ists a close co nnection b etw een C 4 Clifford configur ations and the ancient Theorem of Menelaus (Pedo e 19 70). The latter states that three points P 14 , P 24 , P 34 on the (extended) edges of a tria ngle with vertices P 12 , P 23 , P 13 as display ed in figure 1 are collinear if and only if the condition P 12 P 24 P 23 P 34 P 13 P 14 P 24 P 23 P 34 P 13 P 14 P 12 = − 1 (1.1) for the asso ciated directed lengths is satisfied. Accordingly , the p oints of in tersection of the fo ur lines l 1 , l 2 , l 3 , l 4 in Clifford’s fir st theorem (see figur e 1) ob ey condition (1.1). If the plane is identifi ed with the c o mplex plane then condition (1.1) con- stitutes a multi-ratio condition for the co mplex num b ers P ik which we denote by (cf. § 2 ) M ( P 14 , P 12 , P 24 , P 23 , P 34 , P 13 ) = − 1 (1.2) (mo dulo a trivial cyclic per m utation of the arg umen ts). The latter is evidently inv ar iant under the gr oup of inversiv e transfor mations (Brannan et al. 1 999) and hence the p oints P ik of a C 4 Clifford configur ation likewise satisfy the m ulti-ratio condition (1.2). In fact, it has b een p ointed out in K onop elchenk o & Sc hief (2002 ) that the latter constitutes a defining pr o p e r ty of C 4 Clifford configuratio ns. In this pap er, we inv estigate in detail the geo metric and algebr aic pro per ties of a nov el ge ner alization of Cliffor d’s C 4 configuratio n which has b een discov ered via Gener alize d Cliffor d c onfigur ations and the qdSKP e quation 3 the theo ry of integrable systems (soliton theory) (Ablowitz & Segur 19 81; Zak harov et al. 1980). Thus, in Ko no pe lchenko & Schief (2002), it has b een shown that (1.2) interpreted as a lattice equa tion which is de fined o n the ‘o ctahedral’ vertex configuratio ns of a face-centred cubic (fcc) lattice (cf. § 7) constitutes a Sch warzian version (Dor fman & Nijhoff 19 91; Bogdanov & Konop elchenko 1 9 98) of the Hirota- Miwa eq uation, that is the discrete K adomtsev-Petviash vili (dKP) equation (Hiro ta 1981). The latter is regarded as a ‘master eq uation’ in soliton theo ry since it enco des the co mplete KP hier arch y of soliton equations via sophisticated contin uum limits. The discr ete Sch warzian KP (dSKP ) equatio n admits a natura l multi-component analogue, namely the natural matrix generaliza tion o f the multi-ratio condition (1.2) interpreted a s a lattice equation (Bo gdanov & K o nop elchenk o 199 8). In the simplest case , the qua ternionic dSKP (qdSKP) equa tion lo cally r epresents a s ix- po int relatio n for six quater nions P ik , that is , a rela tion betw een six p o int s P ik in a four - dimensional E uclidean spa ce R 4 if the s tandard identification R 4 ∼ = H with the a lgebra of quaternio ns is made. Since the mult i-ra tio condition (1.2) enco des C 4 Clifford configur ations, it is natur al to inquire a s to the geo metr ic sig nificance of its quater nionic co un terpar t. It turns out that an appro priate characterization of classical C 4 Clifford configurations giv es rise to natura l ana logues in a four- dimensional E uclidean space which are algebra ically governed b y the lo cal qdSKP equation. In the present context, the key prop erty of classica l C 4 Clifford configur ations turns out to b e the Go dt-Ziegenbein pr op erty which s tates that, in a sp ecific sense, the ang les made by four o riented cir cles passing through a p oint a re the same for all eight po ints (Go dt 1896; Ziegenbein 1941). This pro per t y is used in § 3 to define o ctahedral point-circle configuratio ns in R 4 of Clifford t yp e. In § 6, the existence of such generalized Clifford configurations is prov en and it is demonstrated tha t these are indeed gov erned b y the afore- men tioned quaternionic version of the multi-ratio condition (1.2 ). As a by-pro duct, it is shown that, for any five g eneric p oints in R 4 , there exists a pair of as so ciated gener alized Cliffo r d configura tions which are related by r e flection in the hyper s phere defined by the given five p oints. The fina l section is then devoted to the geometr y of the qdSK P (lattice) equation. 2. The classical C 4 Clifford configuration W e b egin with the class ical constructio n of C 4 Clifford c o nfigurations. Th us, co nsider a po int P on the plane and four g eneric circles S 1 , S 2 , S 3 , S 4 passing throug h P as depicted in figure 2. The six a dditional points of intersection are lab elled b y P 12 , P 13 , P 14 , P 23 , P 24 , P 34 . Here, the indices o n P ik corres p ond to those of the circles S i and S k . An y three circles S i , S k , S l int erse c t at three points and therefore define a circle S ikl passing through these po in ts. Cliffor d’s circle theorem (Clifford 187 1) then states tha t the four cir c le s S 123 , S 124 , S 134 , S 234 meet at a p oint P 1234 . Even though Clifford configur ations ( C n ) exist for a ny n umber of initial cir cles S 1 , . . . , S n passing through a p oint P , for brevity , we here ass o ciate with the term ‘Clifford configuratio n’ the ca s e n = 4. In Konop elchenk o & Sc hief (2002), as an immediate consequenc e of the cla ssical Theorem of Menelaus (Pedoe 197 0), it has been demo nstrated that any generic six po int s P 12 , P 13 , P 14 , P 23 , P 24 , P 34 on the plane regarded as complex n um b ers b elong to a Clifford configuration (with the ab ov e-mentioned com binator ics) if a nd o nly if 4 W. K. Schief and B. G. Konop elchenko 0 2 13 14 23 24 12 1 1234 34 124 123 134 234 3 4 Figure 2. A classical C 4 Clifford configuration they o b e y the m ulti-ra tio condition M ( P 14 , P 12 , P 24 , P 23 , P 34 , P 13 ) = − 1 , (2.1) where the multi-ratio of six complex num b ers P 1 , . . . , P 6 is defined by M ( P 1 , P 2 , P 3 , P 4 , P 5 , P 6 ) = ( P 1 − P 2 )( P 3 − P 4 )( P 5 − P 6 ) ( P 2 − P 3 )( P 4 − P 5 )( P 6 − P 1 ) . (2.2) In par ticula r, this c o nfirms the g eometrically evident fact that any five generic po int s o n the plane uniquely define a Clifford configuratio n. Indeed, for any g iven generic p oints P 12 , P 13 , P 14 , P 23 , P 24 , the sixth po in t P 34 is determined b y the linear equation (2.1). The la tter p oint may lie ‘at infinity’, in which ca s e the four circles passing through P 34 degenerate to str aight lines. The justification o f the o rdering of the ar guments in (2.1) is c o nsigned to § 6. The pr eceding discussio n indicates tha t one ma y think of a Clifford config u- ration as a config ur ation of six p oints P 12 , P 13 , P 14 , P 23 , P 24 , P 34 and eight circles S 1 , S 2 , S 3 , S 4 , S 123 , S 124 , S 134 , S 234 which is such that the four circle s S 1 , S 2 , S 3 , S 4 int erse c t at a p oint P or the four cir cles S 123 , S 124 , S 134 , S 234 int erse c t at a p oint P 1234 . Clifford’s circle theorem then guar antees the exis tence of the remaining po int P 1234 or P resp ectively . In this connectio n, it is no ted that the eight p oints P, . . . , P 1234 of a Clifford configuration a ppea r on an equal fo oting so that, at first sight, the ab ov e in terpre ta tion of a Cliffor d configuratio n do es not seem to b e nat- ural. How ever, it turns o ut that it is pr ecisely this p oint of view which a llows for a g eneralization of Clifford c o nfigurations in which, gener ically , the p oints P a nd P 1234 do not exist. A r emark a ble pro per ty of Clifford configurations is that the angles made b y four oriented circles passing throug h a p oint are the same for all eig h t p oints in a sense to Gener alize d Cliffor d c onfigur ations and the qdSKP e quation 5 14 14 12 23 34 24 13 12 34 23 24 13 Figure 3. The com binatorics of an octahed ral p oint-circle configuration be sp ecified in the following s ection. Therein, it is shown that this Godt-Zie genbein prop erty (Godt 1896 ; Ziegenbein 194 1 ) constitutes a defining pro per ty of Clifford configuratio ns. In fact, it is sufficien t to demand that the Go dt-Zieg enbein prop erty holds for the p oints P 12 , P 13 , P 14 , P 23 , P 24 , P 34 . The la tter observ a tio n serves as the basis for the definition of gener alized Clifford configur a tions. 3. Oct ahedral point-circle configurations. Definitions and notation In the following, we are c oncerned with co nfigurations in a four-dimensiona l Eu- clidean s pa ce R 4 consisting of six po int s and eight circles with three p oints on every circle a nd four circles through every p oint. More precisely (cf. fig ur e 3): Definition 3.1 . (Octahedral p oint-circle configurations ) A c onfigur ation of six p oints and eight cir cles in R 4 is terme d an o ctahedra l po int-circle configur ation if the c ombinatorics of the c onfi gur ation is that of an o ct ahe dr on, that is the p oints of the c onfigur ation c orr esp ond to the vertic es of the o ctahe dr on while the cir cles c orr esp ond to t he triangular fac es. In o rder to define o ctahedral p oint-circle co nfigurations o f Cliffor d type, it is necessary to intro duce a corres po ndence betw een c ir cles which pas s through dif- ferent p oints. T o this end, we o bserve that a ny vertex of an o ctahedr on may b e asso ciated with its ‘oppos ite’ counterpart, that is the vertex which is not connected via an edge. Similarly , there ex ist four pairs of disconnected ‘opp osite’ faces . T hus, by virtue of the combinatorial cor resp ondence e mployed in the ab ove definition, any p oint P of a n o ctahedral p oint-circle configuratio n admits an ‘opp osite’ p o int P ∗ and any circle S is a s so ciated with an ‘opp osite’ cir c le S ∗ (cf. figur e 4). Definition 3.2. (Corresp ondence of circles) L et P , P 1 , P 2 and S, S 1 , S 2 b e p oints and cir cles of an o ctahe dr al p oint-cir cle c onfigur ation such that S 1 and S 2 interse ct at P 1 and P 2 and P lies on S . Then, t he cir cles S 1 and S 2 p assing thr ough P 1 ar e said to cor resp ond to the cir cles S 2 and S 1 r esp e ctively p assing thr ough P 2 and the cir cle S p assing thr ough P is s aid t o corr esp ond to the opp osite cir cle S ∗ 6 W. K. Schief and B. G. Konop elchenko * S P S P * Figure 4. ‘Opp osite’ p oints and circles p assing thr ough the opp osite p oint P ∗ : ( S 1 , S 2 ; P 1 , P 2 ) ↔ ( S 2 , S 1 ; P 2 , P 1 ) , ( S ; P ) ↔ ( S ∗ ; P ∗ ) . (3.1) Iterative applica tion of the ab ove co rresp ondence pr inciple immediately leads to the following corr esp ondence: Observ ation 3. 3. Any cir cle S 1 of an o ctahe dr al p oint-cir cle c onfigur ation p assing thr ough a p oint P 1 admits five c orr esp onding cir cles S 2 , . . . , S 6 which p ass thr ough the r emaining five p oints P 2 , . . . , P 6 . Thus, ther e exists a u nique c orr esp ondenc e b etwe en the six s et s of four cir cles S µ k , µ = 1 , 2 , 3 , 4 p assing t hr ough the p oints P k of an o ct ahe dr al p oint-cir cle c onfigur ation. Con v ent ion 3.4. (Orienta tion of circles) The orientation of t he cir cles of an o ctahe dr al p oint-cir cle c onfigur ation is chosen in such a manner that the c orr e- sp onding orientation of t he fac es of the o ctahe dr on is the same for al l fac es (when viewe d fr om ‘outside’) (cf. figu re 5). F or co mpleteness, it is r emarked that the mos t ge ner al a dmiss ible orie ntation of the circles is obtained b y simultaneously changing the or ient ation of a face of the o ctahedron and its three neighbours and then iterating this o per ation. If we now demand that an oriented c ir cle and its tangent v ectors b e of the same orientation then the following definition is natural: Definition 3 . 5. (Angles b et w een circles) The angle made by two oriente d cir- cles S and S ′ p assing thr ough a p oint P of an o ctahe dr al p oint-cir cle c onfigu r ation is that made by the t wo c orr esp onding t angent ve ctors V and V ′ at P , viz ∠ ( S, S ′ ) := ∠ ( V , V ′ ) . (3.2) W e are now in a po sition to define an a nalogue of Clifford’s classic a l configura - tion: Definition 3.6. (Generalized Cliffo rd configurations) An o ctahe dr al p oint- cir cle c onfigur ation is t erme d a gene r alized Clifford configuratio n if the six p oints P k ar e equiv alent in the sense that for any six p airs of c orr esp onding oriente d cir cles S k , S ′ k p assing thr ough P k the angle ∠ ( S k , S ′ k ) is indep endent of k . Gener alize d Cliffor d c onfigur ations and the qdSKP e quation 7 3 1 1 3 4 4 34 3 4 2 1 14 4 2 3 12 2 3 4 1 2 1 1 2 24 2 3 4 23 13 Figure 5. A n admissible orien tation of circles and tangent vectors The following theor em demonstra tes that the ab ov e definition is natura l: Theorem 3.7. (Planar generalized Clifford configurations ) Gener alize d Clif- for d c onfigur ations on the plane c oincide with classic al Cliffor d c onfigur ations. Pr o of. The Go dt-Ziege nbein pr op erty (Go dt 1896 ; Ziegen b ein 19 41) consists of the equiv alence o f the p oints P , . . . , P 1234 of a cla ssical Clifford co nfiguration. Thus, in particular, the p oints P 12 , P 13 , P 14 , P 23 , P 24 , P 34 of any given Clifford configuratio n are equiv alent a nd he nc e the a bove definition of a generalized Clifford configuration is met. Conv ersely , let P 12 , P 13 , P 14 , P 23 , P 24 , P 34 be the six points of a plana r g ener- alized Clifford configur ation. If we set set aside the p oint P 34 , say , then it is evident that, due to the assumption of equiv alence, P 34 may b e r econstructed from the other five p o int s P 12 , P 13 , P 14 , P 23 , P 24 . Indeed, s ince the four circles passing thr ough P 12 are determined by these fiv e p oints, the a ng les made by all pair s of circles are known so that, in turn, the remaining four circles a re uniquely deter mined. On the other hand, the ab ov e five p oints als o b elong to a unique cla ssical C liffo r d c onfiguration as discusse d in the pr e v ious section. The la tter has the Go dt-Z ie g enbein pr o p e r ty and hence coincides with the given gener alized Clifford configuratio n. 4. Quaternions It is well kno wn that the group of co nformal transformations in R n , n > 2 consists o f translations, r otations, scalings a nd inv ersio ns (Dubrovin et al. 1 984). Accor ding ly , generalized Clifford configur ations ar e o b jects of conforma l geo metry since cir cles are mapp ed to circle s. In the current c ontext, it is therefor e natural to identify the four-dimensional Euclide a n spa ce R 4 with the alg ebra of q uaternions H (Ko echer 8 W. K. Schief and B. G. Konop elchenko & Remmert 199 1). Thus, we adopt the quaternio nic repre s ent ation R 4 ∋ ( a, b, c, d ) ↔ ( a 1 + b i + c j + d k ) ∈ H , (4.1) where the matrices 1 , i , j , k are defined by 1 = 1 0 0 1 , i = 0 − ı − ı 0 , j = 0 − 1 1 0 , k = − ı 0 0 ı . (4.2) Then, the following pro per ties and identit ies may be established. Firstly , it is r eadily verified that | X | = √ det X , X X † = det X 1 , < X , Y > = 1 2 tr ( X Y † ) . (4.3) In particula r, if, for no n- v anishing quaternino ns, we denote the cor r esp onding unit vectors b y ˆ X = X | X | (4.4) then cos ∠ ( X, Y ) = 1 2 tr ( ˆ X ˆ Y † ) = 1 2 tr ( ˆ X ˆ Y − 1 ) = 1 2 tr ( X Y † ) √ det X √ det Y . (4.5) Secondly , Cayley’s theo rem (Ko echer & Remmert 1991) states that any elemen t Ω of the or thogonal gro up O (4) is repres ent ed b y e ither X 7→ ˆ AX ˆ B or X 7→ ˆ AX † ˆ B , A, B ∈ H \{ 0 } , (4.6) depe nding on whether Ω is ‘prop er’ (det Ω = 1) or ‘improp er ’ (det Ω = − 1) r e- sp ectively . Conv ersely , any quaternionic a ction of the ab ov e type corres po nds to an orthogo nal mapping Ω. In particular, the o per ation X 7→ ˆ AX † ˆ A, A ∈ H (4.7) constitutes a reflection in the vector A . Finally , the gr oup of confor mal transforma - tions is gener ated by the or ien tation-pr eserving M¨ obius transforma tions (Ahlfors 1981) M : X 7→ ( AX + B )( C X + D ) − 1 , A, B , C , D ∈ H (4.8) and the par ticular reflectio n (conjugation) C : X 7→ X † . (4.9) 5. Quaternionic cross- and multi-ratios The r elev ance of multi-ratios in connection with classica l Cliffo r d co nfigurations has be en indica ted in § 2. It turns out that g eneralized Clifford configuratio ns may also b e describ ed alg ebraically in terms of quaternionic m ulti-ra tios. It is recalled that the cro ss-ratio of four p oints in R 4 is usually taken to be (Ahlfors 19 81) Q ( P 1 , P 2 , P 3 , P 4 ) = ( P 1 − P 2 )( P 2 − P 3 ) − 1 ( P 3 − P 4 )( P 4 − P 1 ) − 1 . (5.1) Gener alize d Cliffor d c onfigur ations and the qdSKP e quation 9 The cro ss-ratio is ‘real’, tha t is Q ( P 1 , P 2 , P 3 , P 4 ) = a 1 , a ∈ R , (5.2) if and o nly if the four p oints P 1 , . . . , P 4 lie o n a circle. The multi-ratio of six po ints may b e defined as M ( P 1 , P 2 , P 3 , P 4 , P 5 , P 6 ) = ( P 1 − P 2 )( P 2 − P 3 ) − 1 ( P 3 − P 4 )( P 4 − P 5 ) − 1 ( P 5 − P 6 )( P 6 − P 1 ) − 1 (5.3) or, alterna tively , ˜ M ( P 1 , P 2 , P 3 , P 4 , P 5 , P 6 ) = ( P 1 − P 6 ) − 1 ( P 6 − P 5 )( P 5 − P 4 ) − 1 ( P 4 − P 3 )( P 3 − P 2 ) − 1 ( P 2 − P 1 ) . (5.4) In the scalar case, the ‘right-m ulti-ratio’ M and the ‘left-multi-ratio’ ˜ M are evi- dent ly iden tical. Howev er, in the quater nio nic case, the tw o mult i-ra tios a r e related by ˜ M ( P 1 , P 2 , P 3 , P 4 , P 5 , P 6 ) = ( P 1 − P 6 ) − 1 M ( P 6 , P 5 , P 4 , P 3 , P 2 , P 1 )( P 1 − P 6 ) . (5.5) This rela tion shows that the multi-ratio c onditions M ( P 1 , P 2 , P 3 , P 4 , P 5 , P 6 ) = − 1 (5.6) and ˜ M ( P 6 , P 5 , P 4 , P 3 , P 2 , P 1 ) = − 1 (5.7) on six p oints P 1 , . . . , P 6 coincide. F urthermore, it is readily seen that the M¨ obius transformatio ns M individua lly prese rve the multi-ratio conditions (5.6) a nd ˜ M ( P 1 , P 2 , P 3 , P 4 , P 5 , P 6 ) = − 1 , (5.8) while (5.6) and (5.8) ar e mapp ed to each other by the confor mal transfor mations C ◦ M whic h change the orientation. The g eometric s ignificance of this fact in the context of genera lized Clifford configura tio ns is discuss ed in the fo llowing section. 6. E xistence and algebraic description of generalized Clifford configurations It has b een shown in § 2 that planar generalized Clifford configur a tions a re uniquely determined b y five p oints. It turns out that the deriv ation of an analo gous sta temen t in the general case is the k ey to an alg ebraic description of genera lized Clifford configuratio ns. T o this end, it is co n venien t to make a canonical choice of the tang ent vectors to or iented circles. Thus, since four p oints X , A, B , C a r e concyclic if and only if their cross-r atio is r eal, the function X ( s ) defined by Q ( X , A, B , C ) = s 1 , s ∈ R (6.1) 10 W. K. Schief and B. G. Konop elchenko parametrizes the o riented cir cle S A,B ,C which passes through A, B , C as s increases with X (0 ) = A, X (1) = B , X ( ∞ ) = C . Differentiation and ev aluatio n a t s = 1 then r esults in the tangent v ector V A,B ,C = ( C − B )( C − A ) − 1 ( B − A ) = ( B − A )( C − A ) − 1 ( C − B ) (6.2) at the point X = B . The latter identit y is merely a prop erty of any three matrices A, B a nd C . Moreov er, if tw o oriented circles S 1 and S 2 meet a t the p oints P and P ′ with asso ciated tangent vectors V 1 and V 2 at P then the vectors V ′ 1 and V ′ 2 given by (cf. (4.7)) V ′ 1 = ( P ′ − P ) V − 1 1 ( P ′ − P ) , V ′ 2 = ( P ′ − P ) V − 1 2 ( P ′ − P ) (6.3) are tangent to the circles S 1 and S 2 at P ′ and the orientation of the tangent v ectors is preserved. In o rder to pro ceed, we int ro duce a natural lab elling of the p oints o f an o ctahe- dral p oint-circle configuratio n a nd the vertices of its underlying o ctahedro n. Th us, the s ix vertices o f the o ctahedro n ar e labe lled by ( i k ) = ( k i ), i 6 = k ∈ { 1 , 2 , 3 , 4 } in such a w ay that opp o site vertices carry complementary indices and the c o rresp ond- ing p oints of the configur ation are deno ted by Φ ik = Φ ki throughout the remainder of this pap er . Theorem 6. 1. (‘Uniqueness’) Ther e exist at most t wo gener alize d Cliffor d c on- figur ations which s har e fi ve p oints and the four asso ciate d cir cles. Pr o of. F or conv enience, we lab el the five common p o int s by Φ 12 , Φ 13 , Φ 14 , Φ 23 , Φ 24 and reg a rd the p oint(s) Φ 34 as unknown. Accordingly , only the four circles S µ 12 , µ = 1 , 2 , 3 , 4 passing thro ugh the p oint Φ 12 are known. The tangen t vectors to these circles a re linearly dep endent and may b e chosen to be V 1 12 = V 14 , 12 , 13 , V 2 12 = V 13 , 12 , 23 , V 3 12 = V 24 , 12 , 14 , V 4 12 = V 23 , 12 , 24 (6.4) as indica ted in figur e 5. Here, the notation V 14 , 12 , 13 = V Φ 14 , Φ 12 , Φ 13 etc. has b een adopted. In the gener ic case, any three of these four vectors span the three-dimen- sional tangent h yp erplane to the h yp e rsphere at Φ 12 defined by the five p oints Φ 12 , Φ 13 , Φ 14 , Φ 23 , Φ 24 . By virtue o f the corre s po ndence principle and the orienta- tion conv en tion, the orientation of the eig h t cir cles is now defined. The vectors V 1 13 = (Φ 13 − Φ 12 )( V 2 12 ) − 1 (Φ 13 − Φ 12 ) V 2 13 = (Φ 13 − Φ 12 )( V 1 12 ) − 1 (Φ 13 − Φ 12 ) (6.5) are tangent to the c ir cles S 1 13 = S 2 12 and S 2 13 = S 1 12 resp ectively at the p oint Φ 13 , while V 1 14 = (Φ 14 − Φ 12 )( V 3 12 ) − 1 (Φ 14 − Φ 12 ) (6.6) constitutes a ta ngent v ector to the cir cle S 1 14 = S 3 12 at the p oint Φ 14 . Now, in order to determine the tw o r emaining tangen t v ectors at the p oint Φ 13 , w e mak e use of the assumption that, in particular , the p oints Φ 12 , Φ 13 and Φ 14 are equiv a le n t. Thu s, the circle S 3 13 which passes thro ug h the p oints Φ 13 and Φ 14 gives r ise to the relations ∠ ( S 3 13 , S 1 13 ) = ∠ ( S 3 12 , S 1 12 ) , ∠ ( S 3 13 , S 2 13 ) = ∠ ( S 3 12 , S 2 12 ) , (6.7) Gener alize d Cliffor d c onfigur ations and the qdSKP e quation 11 while the circle S 2 14 = S 3 13 is asso ciated with the additional r elation ∠ ( S 2 14 , S 1 14 ) = ∠ ( S 2 12 , S 1 12 ) , (6.8) where S 1 14 = S 3 12 . If the tangent vector to S 3 13 at the p oint Φ 13 is denoted by V 3 13 then the vector V 2 14 = (Φ 14 − Φ 13 )( V 3 13 ) − 1 (Φ 14 − Φ 13 ) (6.9) is tange nt to the circle S 2 14 at the p oint Φ 14 . According ly , the co nditions (6.7 ) and (6.8) tra nslate into tr [ ˆ V 3 13 ( ˆ V 1 13 ) † ] = tr [ ˆ V 3 12 ( ˆ V 1 12 ) † ] tr [ ˆ V 3 13 ( ˆ V 2 13 ) † ] = tr [ ˆ V 3 12 ( ˆ V 2 12 ) † ] tr [ ˆ V 2 14 ( ˆ V 1 14 ) † ] = tr [ ˆ V 2 12 ( ˆ V 1 12 ) † ] (6.10) which may b e written as tr [ ˆ ∆( ˆ V 2 12 ) − 1 ] = tr [ ˆ V 1 12 ( ˆ V 3 12 ) − 1 ] tr [ ˆ ∆( ˆ V 1 12 ) − 1 ] = tr [ ˆ V 2 12 ( ˆ V 3 12 ) − 1 ] tr [ ˆ ∆( ˆ V 1 12 ) − 1 ˆ V 3 12 ( ˆ V 1 12 ) − 1 ] = tr [ ˆ V 2 12 ( ˆ V 1 12 ) − 1 ] (6.11) with the definition ∆ = (Φ 13 − Φ 12 )( V 3 13 ) − 1 (Φ 13 − Φ 12 ) . (6.12) The cons traints (6.11) constitute a linear s ystem for the unit vector ˆ ∆. Hence , there are tw o ca ses to distinguish: Case 1: If the tangen t vectors V µ 12 span a tw o-dimensional plane then the five p oints Φ 12 , Φ 13 , Φ 14 , Φ 23 , Φ 24 necessarily lie o n a 2-spher e (or a plane). On use o f a con- formal transfo rmation, this 2-spher e ma y b e mapp ed to a pla ne so that w e ar e left with the co ns ideration o f g eneralized Clifford co nfigurations in a three-dimensio nal Euclidean spac e sub ject to the five p oints Φ 12 , Φ 13 , Φ 14 , Φ 23 , Φ 24 being co-plana r. If there exists a g eneralized Clifford configura tion for which Φ 34 do es not lie o n the corr esp onding pla ne Σ then reflec tio n of Φ 34 in Σ pro duces ano ther general- ized Clifford co nfiguration. F urthermor e, the classical Cliffor d configuration defined uniquely by the fiv e p oints constitutes a third (planar) g e neralized Clifford configu- ration. Thus, the num ber of distinct genera liz e d Cliffo r d configur ations sharing five co-planar p oints is o dd. On the other hand, it is readily seen that the rank of the linear system (6.11) is 2 since the tange nt vectors V 1 12 , V 2 12 , V 3 12 are linear ly depe nden t a nd hence there exist at most tw o solutions ˆ ∆. Any specific choice of ˆ ∆ de ter mines the tange nt vector V 3 13 up to its magnitude. Moreover, since the angles b etw ee n the vectors V 1 13 , V 2 13 , V 3 13 and the vector V 4 13 which is tangent to the circle S 4 13 passing through the po int s Φ 23 and Φ 13 are known and the four vectors V µ 13 m ust b e linearly dependent, the direction of the ta ng ent vector V 4 13 is uniquely determined. This , in turn, shows that the p o int Φ 34 is unique. Thus, there e xist at most t wo generalized Clifford configurations. W e therefore conclude tha t the ab ove-men tioned class ical Clifford configur ation is the only g e neralized Clifford configuratio n under the cur r ent assumption. 12 W. K. Schief and B. G. Konop elchenko Case 2: If the tangent v ectors V µ 12 span a three-dimensional vector spa ce then the tang ent vectors V 1 12 , V 2 12 , V 3 12 are linear ly independent without lo ss of gene r ality . Accordingly , the rank of the linear s ystem (6.11) is 3 and the cor resp onding tw o solutions are g iven by ˆ ∆ 1 = ˆ V 1 12 ( ˆ V 3 12 ) − 1 ˆ V 2 12 and ˆ ∆ 2 = ˆ V 2 12 ( ˆ V 3 12 ) − 1 ˆ V 1 12 . (6.13) It is noted that the a bove solutions ar e distinct since equality implies that [ ˆ V 1 12 ( ˆ V 3 12 ) − 1 , ˆ V 2 12 ( ˆ V 3 12 ) − 1 ] = 0 and hence V 1 12 , V 2 12 , V 3 12 are linear ly dependent. In fac t, since the pro jections of ˆ ∆ 1 and ˆ ∆ 2 onto V 1 12 , V 2 12 and V 3 12 coincide, the unit v ector s ˆ ∆ 1 and ˆ ∆ 2 are rela ted b y reflection in the three-dimensio nal v ector s pace spanned by V 1 12 , V 2 12 , V 3 12 . As in the prev ious c a se, any s p ecific ch oice of ˆ ∆ now determines the p oint Φ 34 uniquely so that there exis t at most tw o generalize d Clifford config- urations. Remark a bly , the ab ov e a nalysis implies that genera lized Clifford configur ations in thr e e-dimensional Euclidean s pa ces or spheres are essentially tw o-dimensiona l. Theorem 6.2. Any gener alize d Cliffor d c onfigur ation in a thr e e-dimensional Eu- clide an sp ac e R 3 or a thr e e-dimensional spher e is either planar or c onfine d to a two-dimensional spher e and may ther efor e b e mapp e d to a classic al Cliffor d c onfig- ur ation by me ans of a s u itable c onformal t r ansformation. Pr o of. Since a ny genera lized Clifford configura tion in a three-dimensional hyper - sphere may b e mapped via a confor mal transformatio n to a g eneralized Clifford configuratio n in a three-dimensio nal subspa ce of R 4 , we may co nfine our selves to the c ase o f a gener alized Clifford configura tion in R 3 which we deno te by E and regar d as b eing embedded in R 4 . As in the pr eceding pr o of, we consider the five po int s Φ 12 , Φ 13 , Φ 14 , Φ 23 , Φ 24 and set aside the po in t Φ 34 . If the tangent vectors V µ 12 span a t wo-dimensional pla ne then the generalized Cliffor d config uration is pla nar or confined to a 2 -sphere as shown ab ov e. Hence, we may assume without loss o f generality that E = s pan { V 1 12 , V 2 12 , V 3 12 } . This implies, in turn, that the tw o solu- tions ˆ ∆ 1 and ˆ ∆ 2 of the linear system (6.11) are distinct and are r e lated by reflection in E . Hence, ˆ ∆ 1 , ˆ ∆ 2 6∈ E . The key obser v ation is now the following: Theorem 6.3. (Multi-ratio de scription of generali zed Clifford configura- tions) The p oints Φ ik of a gener alize d Cliffor d c onfigu r ation ar e r elate d by either M (Φ 14 , Φ 12 , Φ 24 , Φ 23 , Φ 34 , Φ 13 ) = − 1 (6.14) or ˜ M (Φ 14 , Φ 12 , Φ 24 , Φ 23 , Φ 34 , Φ 13 ) = − 1 . (6.15) Conversely, any s ix p oints Φ ik of an o ctahe dr al p oint-cir cle c onfigura tion which ob ey either of t he mu lti-r atio c onditions ( 6.14 ) or (6.15) c onstitu te t he p oints of a gener alize d Cliffor d c onfigur ation. Before we prov e the theorem, it is observed that the ab ov e mult i-ra tio conditions are represe ntatives of tw o equiv alence clas s es o f multi-ratio co nditions which may Gener alize d Cliffor d c onfigur ations and the qdSKP e quation 13 5 α 1 α 6 α 4 α 3 α 2 α 6 P α 5 α α 2 P P 1 P α 4 P α 3 P α Figure 6. An orien ted hexagon ( α 1 , α 2 , α 3 , α 4 , α 5 , α 6 ) asso ciated with the multi-ratio condition M ( P α 1 , P α 2 , P α 3 , P α 4 , P α 5 , P α 6 ) = − 1 be imp os ed o n a n o c tahedral p oint-circle configuratio n. Sp ecifically , let us consider an or ient ed hexag on ( α 1 , α 2 , α 3 , α 4 , α 5 , α 6 ) with fixed ‘initial’ vertex α 1 formed by six edge s o f a n o ctahe dr on with distinct vertices α i in s uch a way tha t any tw o adjacent edg es of the hexago n b elo ng to a triang ular face of the o ctahedr on (cf. figure 6) and imp os e the multi-ratio condition M ( P α 1 , P α 2 , P α 3 , P α 4 , P α 5 , P α 6 ) = − 1 (6.16) on the points P α i of an a sso ciated o ctahedral point-circle configuration. There exist 48 such hexag ons and in the planar case the asso ciated multi-ratio conditions a re equiv alent. How ever, the situation is different in the (generic) quaternionic case. Lemma 6.4. The mu lti-r atio c onditions (6.14) and (6.15 ) ar e either invariant or mapp e d to e ach other by t he asso ciate d o ctahe dr al symmetry gr oup. In p articular, the su b gr oup of symmetries which le ave the multi-r atio c onditions invariant c onsists of the p ermutations of the indic es 1 , 2 , 3 , 4 . Pr o of. On the one hand, a typical p ermutation which leads to a non-trivia l ordering of the a rguments in the multi-ratio conditions is g iven b y (1 , 2 , 3 , 4) → (4 , 2 , 3 , 1). The ass o ciated multi-ratio condition M (Φ 14 , Φ 24 , Φ 12 , Φ 23 , Φ 13 , Φ 34 ) = − 1 (6.17) may b e brought into the for m (Φ 14 − Φ 24 )(Φ 24 − Φ 12 ) − 1 (Φ 12 − Φ 23 ) + (Φ 34 − Φ 14 )(Φ 13 − Φ 34 ) − 1 (Φ 23 − Φ 13 ) = 0 . (6.18) The identities (Φ 14 − Φ 24 )(Φ 24 − Φ 12 ) − 1 (Φ 12 − Φ 23 ) = (Φ 14 − Φ 12 )(Φ 24 − Φ 12 ) − 1 (Φ 24 − Φ 23 ) + Φ 23 − Φ 14 (Φ 34 − Φ 14 )(Φ 13 − Φ 34 ) − 1 (Φ 23 − Φ 13 ) = (Φ 13 − Φ 14 )(Φ 13 − Φ 34 ) − 1 (Φ 23 − Φ 34 ) + Φ 14 − Φ 23 (6.19) 14 W. K. Schief and B. G. Konop elchenko then lea d to (Φ 14 − Φ 12 )(Φ 24 − Φ 12 ) − 1 (Φ 24 − Φ 23 ) + (Φ 13 − Φ 14 )(Φ 13 − Φ 34 ) − 1 (Φ 23 − Φ 34 ) = 0 (6.20) which, in tur n, is the original multi-ratio co ndition (6.14). On the other hand, comp o sition o f the s ubgroup o f p ermutations with any ‘ro- tation by 90 degr ees’ of the o ctahedro n gene r ates the remaining 24 discr ete sym- metries. F or instance, the rotatio n (14 , 12 , 24 , 23 , 34 , 13) → (24 , 12 , 23 , 13 , 34 , 14) pro duces the multi-ratio conditio n M (Φ 24 , Φ 12 , Φ 23 , Φ 13 , Φ 34 , Φ 14 ) = − 1 (6.21) which is, by definition, equiv alent to ˜ M (Φ 14 , Φ 24 , Φ 12 , Φ 23 , Φ 13 , Φ 34 ) = − 1 . (6.22) The latter is mer ely the tilde version of (6.1 7) a nd hence equiv alent to the multi- ratio condition (6.1 5). W e are now in a pos ition to prove theorem 6.3. Pr o of. (of theo rem 6.3) By v ir tue of theo rem 6.1 and the fact that either of the m ulti-ra tio conditions (6.14) or (6.15) may b e r e g arded as a definition of a po in t in terms of five arbitr a ry p oints, it remains to show that the multi-ratio conditions indeed give rise to gener alized Clifford c onfigurations . Thus, we here as sume that the six points Φ ik of an octa hedral point-circle configuration are constrained by one of the multi-ratio conditions and choo se the tang ent vectors V µ 12 as in the pro of of lemma 6.1. Acco rdingly , a set of corre spo nding tangent vectors V µ 13 of the corr e ct orientation at the p oint Φ 13 is given by (cf. figure 5) V 1 13 = V 23 , 13 , 12 , V 2 13 = V 12 , 13 , 14 , V 3 13 = V 14 , 13 , 34 , V 4 13 = V 34 , 13 , 23 . (6.23) The e x pressions (6.12) and (6.13) for the quantities ∆ and ˆ ∆ 1 , ˆ ∆ 2 suggest that one should consider the orientation- and a ngle-preser ving mappings O 1 : X 7→ (Φ 13 − Φ 12 )( V 2 12 ) − 1 X ( V 1 12 ) − 1 (Φ 13 − Φ 12 ) O 2 : X 7→ (Φ 13 − Φ 12 )( V 1 12 ) − 1 X ( V 2 12 ) − 1 (Φ 13 − Φ 12 ) . (6.24) Indeed, it is rea dily verified that V ν 13 = O i ( V ν 12 ) , ν = 1 , 2 (6.25) (cf. (6.5 )) and a short calculation reveals that O 1 ( V 3 12 )( V 3 13 ) − 1 = − M (Φ 13 , Φ 23 , Φ 12 , Φ 24 , Φ 14 , Φ 34 ) ( V 4 13 ) − 1 O 1 ( V 4 12 ) = − ˜ M (Φ 13 , Φ 14 , Φ 12 , Φ 24 , Φ 23 , Φ 34 ) ( V 3 13 ) − 1 O 2 ( V 3 12 ) = − ˜ M (Φ 13 , Φ 23 , Φ 12 , Φ 24 , Φ 14 , Φ 34 ) O 2 ( V 4 12 )( V 4 13 ) − 1 = − M (Φ 13 , Φ 14 , Φ 12 , Φ 24 , Φ 23 , Φ 34 ) . (6.26) Gener alize d Cliffor d c onfigur ations and the qdSKP e quation 15 Two conclusions ma y now b e drawn from lemma 6.4. Firstly , the conditions (6.14) and (6.15) are equiv alent to M (Φ 13 , Φ 23 , Φ 12 , Φ 24 , Φ 14 , Φ 34 ) = − 1 ⇔ ˜ M (Φ 13 , Φ 14 , Φ 12 , Φ 24 , Φ 23 , Φ 34 ) = − 1 (6.27) and ˜ M (Φ 13 , Φ 23 , Φ 12 , Φ 24 , Φ 14 , Φ 34 ) = − 1 ⇔ M (Φ 13 , Φ 14 , Φ 12 , Φ 24 , Φ 23 , Φ 34 ) = − 1 (6.28) resp ectively a nd henc e it follows that V µ 13 = O 1 ( V µ 12 ) or V µ 13 = O 2 ( V µ 12 ) , µ = 1 , 2 , 3 , 4 (6.29) depe nding o n whether (6.14) or (6.15) is ass umed to hold. Thus, the p oints Φ 12 and Φ 13 are equiv alent in the sense of definition 3.6 since ∠ ( V µ 12 , V µ ′ 12 ) = ∠ ( V µ 13 , V µ ′ 13 ) , µ, µ ′ ∈ { 1 , 2 , 3 , 4 } . (6.30) Secondly , since the p oints Φ 12 and Φ 13 are equiv alent, the p oints Φ π (1) π ( 2) and Φ π (1) π ( 3) are equiv alent for any p ermutation π of the indices 1 , 2 , 3 , 4. Hence, all po int s are eq uiv alent. This completes the pro of. W e conclude this section with the remark that if a p oint of a generalized Clifford configuratio n which is not conformally equiv alent to a clas s ical Clifford config ur a- tion is inv erted with resp ect to the h yp ersphere which passe s thr ough the other five p oints then another generalized Cliffor d configuration is obtained. Thus, theo- rem 6.3 implies the following co r ollary: Corollary 6.5. If two gener alize d Cliffor d c onfigur ations define d by M (Φ 14 , Φ 12 , Φ 24 , Φ 23 , Φ 34 , Φ 13 ) = − 1 ˜ M (Φ 14 , Φ 12 , Φ 24 , Φ 23 , ˜ Φ 34 , Φ 13 ) = − 1 (6.31) ar e not c onformal ly e quivalent to a classic al Cliffor d c onfigur ation then the p oints Φ 34 and ˜ Φ 34 ar e r elate d by inversion with r esp e ct to the (wel l-define d) hyp erspher e p assing thr ough the c ommon p oints Φ 13 , Φ 14 , Φ 12 , Φ 24 , Φ 23 . Int eres ting ly , if one chooses the p oints Φ 13 , Φ 14 , Φ 12 , Φ 24 , Φ 23 in such a way that ˜ Φ 34 lies ‘at infinit y’ then the above corollar y implies tha t the p oint Φ 34 constitutes the ce ntre of the hyper sphere whic h pa sses thr ough these five points. 7. The quaternionic discrete Sc hw arzian KP equation In Ko nop elchenk o & Schief (2002 ), it has b een demonstra ted that the multi-ratio condition (2.1) in terpreted as a lattice equation is nothing but a Schw a rzian version of the disc r ete Ka do mt sev-Petviashvili (dKP) equation which constitutes a ‘master equation’ in the theory o f integrable systems (Ablowitz & Seg ur 1981 ; Z akharov et al. 19 8 0). Accor dingly , the dSK P equatio n admits a geometric in terpre tation in 16 W. K. Schief and B. G. Konop elchenko 2 1 2 3 _ _ _ 1 3 Figure 7. Tw o octahedra embedded in the fcc lattice F terms o f classica l Cliffor d config urations. Here, we present a n ana logous construc- tion of three- dimensional ‘Clifford la ttices’ in a four- dimensional Euclidea n space asso ciated with the quaternionic multi-ratio condition. Due to the absence of any additional p oints of in tersection of the circles b elo ng ing to a gener ic gener alized Clifford co nfig uration, not only is the quater nio nic case more natural but it a ls o includes the a fo re-mentioned s calar cas e. W e consider lattices o f the combinatorics of a face-centred cubic (fcc) la ttice in a four - dimensional E uclidean spa ce, that is ma ps of the form Φ : F → H , F = { ( n 1 , n 2 , n 3 ) ∈ Z 3 : n 1 + n 2 + n 3 o dd } . (7.1) An y six p oints of F which constitute the centres o f the faces of a c ub e comp osed of eight adjacent elementary cub es o f Z 3 may b e regarded as the v ertices o f an o ctahedron (cf. figure 7). In this wa y , the fcc lattice may b e iden tified with the vertices of a collection of oc tahedra which meet at common edg e s . Accor dingly , Φ( F ) constitutes a set of p oints belo nging to o ctahedr al p oint-circle configura tions. It is therefore natural to require that these p oint-circle configurations b e of gener alized Clifford type . In terms of the la b elling (7.1 ), this implies that for a n y o c ta hedron centred at ( ν 1 , ν 2 , ν 3 ) ∈ Z 3 with ν 1 + ν 2 + ν 3 even, one o f the multi-ratio conditio ns M (Φ ¯ 1 , Φ 2 , Φ ¯ 3 , Φ 1 , Φ ¯ 2 , Φ 3 ) = − 1 (7.2) and ˜ M (Φ ¯ 1 , Φ 2 , Φ ¯ 3 , Φ 1 , Φ ¯ 2 , Φ 3 ) = − 1 (7.3) obtains, wher e the arguments of Φ have b een suppressed and the notation Φ = Φ( ν 1 , ν 2 , ν 3 ) , Φ ¯ 1 = Φ( ν 1 − 1 , ν 2 , ν 3 ) , Φ 2 = Φ( ν 1 , ν 2 + 1 , ν 3 ) , . . . (7.4) has b een a dopted. Two w ell-defined maps a re obtained by demanding that the ‘same’ m ulti-ratio condition is imp ose d on all o ctahedra. Th us, we say that the map Φ defines a Cliffor d lattic e in H if either (7.2) or (7.3) regarde d as a lattice equation ho lds. It is noted that these tw o equations a re essentially identical in the Gener alize d Cliffor d c onfigur ations and the qdSKP e quation 17 sense that if Φ( n 1 , n 2 , n 3 ) is a solution of (7.2) then Φ( − n 1 , − n 2 , − n 3 ) is a solution of (7.3) and vice versa. If the fcc lattice F is mapped to a simple cubic lattice Z 3 via the rela belling F ∋ ( n 1 , n 2 , n 3 ) ↔ ( m 1 , m 2 , m 3 ) ∈ Z 3 (7.5) defined by n 1 = m 2 + m 3 − 1 , n 2 = m 1 + m 3 − 1 , n 3 = m 1 + m 2 − 1 (7.6) then the la ttice equation (7.2 ) assumes the standard for m of the quaternionic re- duction M (Φ ˜ 1 , Φ ˜ 1 ˜ 3 , Φ ˜ 3 , Φ ˜ 2 ˜ 3 , Φ ˜ 2 , Φ ˜ 1 ˜ 2 ) = − 1 (7.7) of the integrable m ulti-comp onent dSKP equation (Bogdanov & Konop elchenk o 1998), wherein the subscripts o n Φ now refer to unit increments of the v ariables m 1 , m 2 , m 3 . The co nformal geo metry of the qdSKP equation (7.7 ) and the a sso ciated (dis- crete) Sch warzian Dav ey-Stewartson I I hier arch y has b een dis cussed in detail in Konop elchenk o & Schief (200 5). There in, it has b een shown that any standard dis- crete iso thermic sur face (Bob enko & Pink all 19 96) may b e extended via a transla- tional symmetry to a three-dimensio nal lattice in suc h a manner that a (degenerate) Clifford lattice is obtained. In particular , Clifford la ttices encapsula te discrete sur- faces of constant mean curv ature and discre te minimal surfac e s . Thus, apart from its s ignificance in co nnection with (genera lized) Clifford configura tions, the qdSKP equation a lso plays an impo rtant role in the area of integrable discrete differential geometry (Bo b enko & Seiler 1 999). The geo metric integrabilit y of the qdSKP equation (7.7) may b e shown by em- bedding genera lized Clifford co nfigurations in four- dimensional lattices of s uitable combinatorics so that a ny three-dimensiona l ‘slice’ c onstitutes a gener alized Clifford lattice. In the case of clas sical Clifford configurations, Desarg ues’ class ical theorem (Pedoe 19 70) tur ns out to be the key to the constr uction of a well-posed Ca uchy problem for planar Clifford lattices. How ever, a r e formulation of Desarg ues’ theor em in terms o f a ng les is requir ed in order to formulate a well-posed Cauch y pr o blem for four-dimensional Clifford lattices in H . In this manner, the standard Lax represen- tation (Bogda nov & Konop elchenk o 199 8) and a B¨ acklund transfor mation for the qdSKP equa tion may b e der ived geo metrically . A detailed discussio n of this topic go es b eyond the s cop e of this pap er a nd is consigned to a separa te publication. Ablow itz, M. J. & Segur, H. 1981 Solitons and the inverse sc attering tr ansform , Philadel- phia: SIAM. Ahlfors, L. V . 1981 M¨ obius tr ansformations in sever al dimensions , Ordwa y Professorship Lectures in Mathematics, Univ. Minnesota. Bobenko, A. I. & Pink all, U. 1996 Discrete isothermic surfaces. J. r eine angew. Math. 475 , 187–208 . Bobenko, A. I. & Seiler, R. (eds) 1999 Discr ete inte gr able ge ometry and physics , Oxford: Clarendon Press. Bogdano v, L. V. & Konop elchenko , B. G. 1998 Analytic-b ilinear approach to integrable hierarc hies. I I. Multicomponent KP and 2D T o da lattice hierarc hies. J. Math. Phys. 39 , 4701– 4728. 18 W. K. Schief and B. G. Konop elchenko Brannan, D. A., Esplen, M. F. & Gra y , J. J. 1999 Ge ometry , Cam bridge Un ivers ity Press. Bro wn, L. M. 1954 A configuration of points and spheres in four-dimensional space. Pr o c. R. So c. Edinb. A 64 , 145–14 9. Clifford, W. K. 1871 A synthetic pro of of Miquel’s theorem. Oxfor d, Cambridge and Dublin Messenger of Math. 5 , 124–141. Co x, H. 1891 Application of Grassmann’s Ausdehnungslehre to properties of circles . Quart. J. Pur e Appl. Math. 25 , 1–71. Co xeter, H. S. M. 1956 Review of Brown (1954). Math. Re v. 17 , 886. de Longechamps, G. 1877 Note d e g´ eometrie. Nouvel le Corr esp. Math` emat. 3 , 306–312; 340–347 . Dorfman, I. Y a & Nijhoff, F. W. 1991 On a 2+1-dimensional version of the K richever- Novik o v equation. Phys. L ett. 157A , 107–112. Dubrovin, B. A., F omenko, A. T. & Novik o v, S. P . 1984 Mo dern ge ometry – metho ds and applic ations. Part I. The ge ometry of surfac es, tr ansformation gr oups, and fields , New Y ork: S pringer V erlag. Godt, W. 1896 Ueb er eine merkw ¨ urdige K reisfigur. Math. Ann. 47 , 564–572. Grace, J. H. 1898 Circles, spheres and linear complexes. T r ans. Camb. Phi l. So c. 16 , 153–190 . Hirota, R . 1981 Discrete analogue of a generalized T o da equation. J. Phys. So c. Jap an 50 , 3785–379 1. Koecher, M. & R emmert, R. 199 1 Hamilton’s quaternions. In Numb ers (ed. H .- D. Ebbing- haus, H. Hermes, F. Hirzebruch, M. Ko echer, K. Mainzer, J. N eukirch, A. Prestel & R. Remmert). Graduate T ext in Mathematics/Readings in Mathematics, no. 123, pp . 189–220 , New Y ork: Springer V erlag. Konop elc henko, B. G. & Schief, W. K. 2002 Menelaus’ theorem, Clifford configurations and inv ersive geometry of t he Schw arzian KP hierarc hy . J. Phys. A: Math. Gen. 35 , 6125–61 44. Konop elc henko B. G. & Sc hief, W. K. 2005 Conformal geometry of the (discrete) Sch w arzian Dav ey-Stewartson I I hierarc hy . Glasgow Math. J. 47A , 121–131. Longuet-Higgins, M. S . 1972 Clifford’s chain and its analogues in relation to the h igher p olytop es. Pr o c. R. So c. L ond. A 330 , 443–466. P edo e, D. 1970 A c ourse of ge ometry , Cambridge Univers ity Press. Zakharov, V. E., Manako v , S. V., Noviko v , S. P . & Pitaevski, L. P . 1980 Soliton the ory. The i nverse pr oblem metho d , Mosco w: Nauk a; 1984 New Y ork: Plen um Press. Ziegen b ein, P . 1941 K onfigurationen in d er Kreisgeometrie. J. r ei ne angew. Math. 183 , 9–24.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment