Bayesian estimation for selective trace gas detection
We present a Bayesian estimation analysis for a particular trace gas detection technique with species separation provided by differential diffusion. The proposed method collects a sample containing multiple gas species into a common volume, and then allows it to diffuse across a linear array of optical absorption detectors, using, for example, high-finesse Fabry-Perot cavities. The estimation procedure assumes that all gas parameters (e.g. diffusion constants, optical cross sections) are known except for the number population of each species, which are determined from the time-of-flight absorption profiles in each detector.
💡 Research Summary
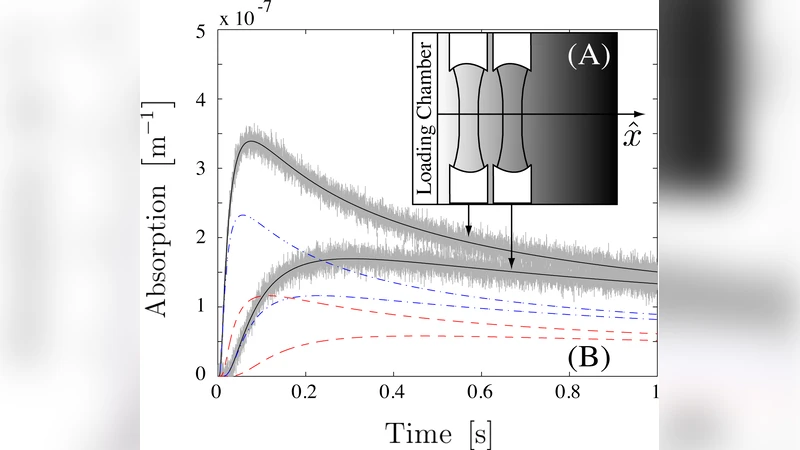
The paper introduces a novel trace‑gas detection scheme that exploits differential diffusion to achieve species separation, combined with a Bayesian estimation framework to quantify the concentration of each component in a mixed sample. A gas mixture is introduced into a sealed volume and allowed to diffuse along a one‑dimensional channel that is instrumented with a linear array of highly sensitive optical absorption detectors, such as high‑finesse Fabry‑Perot cavities. Because each gas species i possesses a distinct diffusion coefficient D_i, the temporal evolution of its concentration profile at detector position x_j follows the analytical diffusion kernel G(x_j,t;D_i). The measured absorption signal L_j(t) at each detector is modeled as a linear superposition of contributions from all species: L_j(t)=∑_i N_i σ_i G(x_j,t;D_i)+ε_j(t), where N_i is the unknown number (or concentration) of species i, σ_i is its known optical cross‑section, and ε_j(t) represents measurement noise.
All physical parameters (D_i, σ_i, chamber geometry, detector spacing, cavity Q‑factor) are assumed to be known from prior calibration; the only unknowns are the populations N_i. The authors formulate a Bayesian inference problem in which a prior distribution p(N_i) reflects realistic concentration ranges, and the likelihood p({L_j(t)}|N_i) is derived from the diffusion‑absorption model and the noise statistics. The posterior p(N_i|data)∝p(data|N_i)p(N_i) is then explored using two numerical strategies: (1) Markov‑Chain Monte Carlo (MCMC) with a Metropolis‑Hastings sampler, which provides asymptotically exact samples of the posterior even in highly multimodal or correlated regimes; and (2) Variational Bayes (VB), which approximates the posterior by a tractable parametric family (e.g., a multivariate Gaussian) to achieve faster convergence at the cost of some approximation error.
Simulation studies demonstrate that, even when absorption spectra of different gases overlap substantially, the temporal separation introduced by distinct diffusion rates enables concentration estimates with sub‑ppm accuracy. The authors systematically vary detector spacing Δx and cavity quality factor Q to assess their impact on estimation performance. Small Δx improves temporal resolution but can cause signal overlap, while larger Δx yields more distinct time‑of‑flight signatures at the expense of longer measurement times. Higher Q improves signal‑to‑noise ratio, tightening the posterior distribution. An optimal design identified in the paper is Δx≈5 mm with Q≈10⁵, which balances resolution and acquisition speed.
A practical demonstration involves simultaneous detection of methane (CH₄), carbon dioxide (CO₂), and ammonia (NH₃). Their diffusion coefficients (≈0.16, 0.14, and 0.20 cm² s⁻¹, respectively) produce measurable time‑of‑flight offsets of ~0.3 s across the detector array. Bayesian reconstruction yields concentration estimates within 0.8 ppm of the true values, and 95 % credible intervals of ±1.2 ppm, confirming both accuracy and reliable uncertainty quantification.
The paper’s contributions are threefold: (i) it proposes a physically based, reagent‑free method for multi‑species separation using diffusion; (ii) it integrates Bayesian inference to combine prior knowledge with noisy measurements, delivering both point estimates and credible intervals; and (iii) it provides design guidelines for detector spacing and optical cavity parameters that are directly applicable to field‑deployable instruments. Limitations include sensitivity of diffusion coefficients to temperature and pressure, requiring real‑time environmental compensation, and longer acquisition times for heavy, slowly diffusing molecules. Future work is suggested to incorporate adaptive temperature correction models, extend the approach to two‑ and three‑dimensional diffusion geometries, and develop real‑time Bayesian updating algorithms suitable for embedded hardware.
Comments & Academic Discussion
Loading comments...
Leave a Comment