Necessary Conditions for Discontinuities of Multidimensional Size Functions
Some new results about multidimensional Topological Persistence are presented, proving that the discontinuity points of a k-dimensional size function are necessarily related to the pseudocritical or special values of the associated measuring function…
Authors: Andrea Cerri, Patrizio Frosini
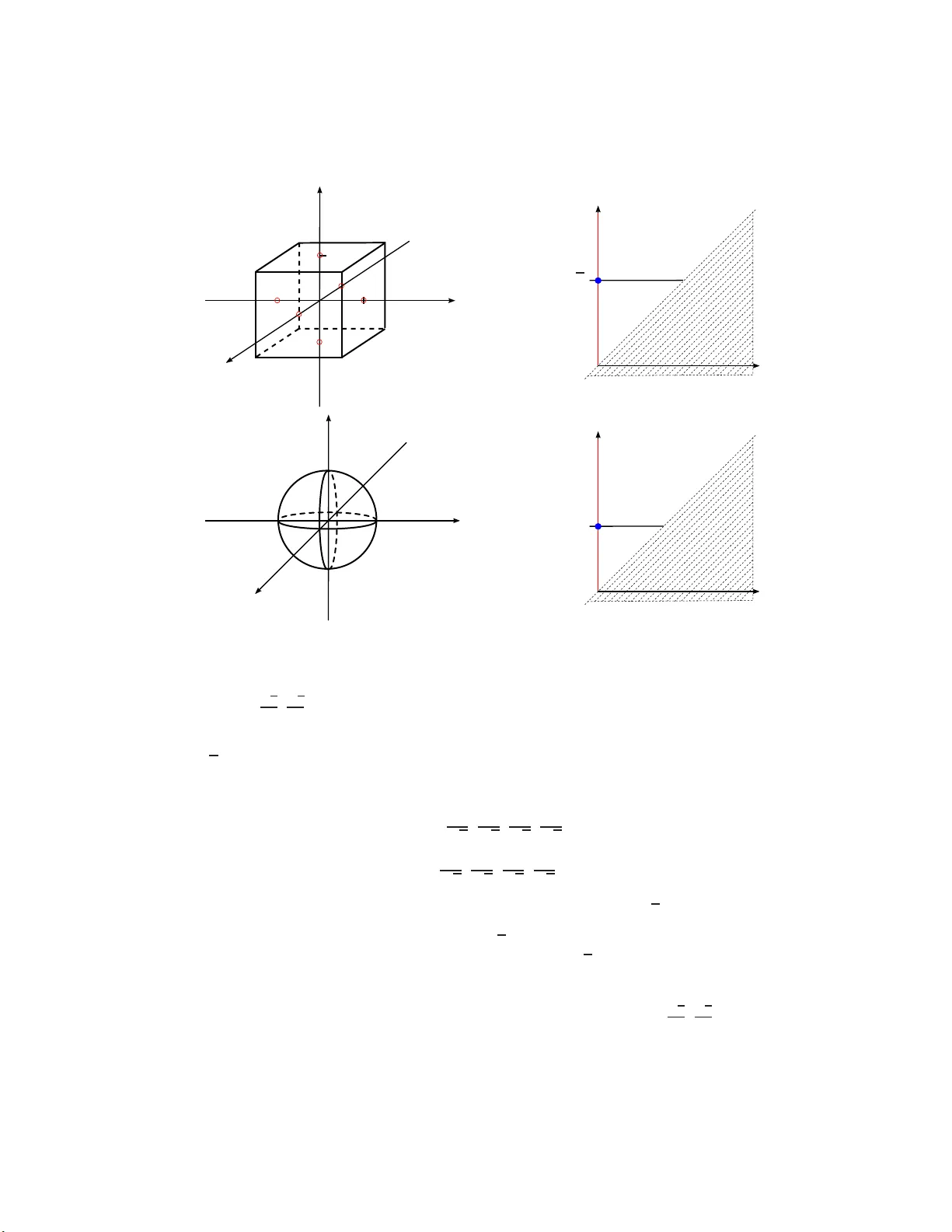
NECESSAR Y CONDITIONS F OR DISCONTINUITIES OF MUL T IDIMENSIONAL SIZE FUNCTIONS A. CERRI AND P . FROSINI Abstract. Some new results ab out multidimensional T opological P ersistence are presen ted, proving th at the discon tin uit y p oin ts of a k -dimensional size function are necessarily related to the pseudocritical or sp ecial v alue s of the associated m easuring function. Introduction T op o logical Persistence is devoted to the s tudy of stable prop erties of sublevel sets of top olo gical spac es and, in the cours e of its developmen t, has re vealed itself to b e a suitable fr amework when dea ling with applica tions in the field of Shap e Analysis a nd Comparis on. Since the b eginning of the 19 90s res earch on this sub- ject has b een car r ied out under the name of Size Theor y , studying the concept of size function , a mathematical too l a ble to describ e the q ualitative pr op erties o f a shap e in a q ua nt itative way . More precisely , the main idea is to mo del a s hap e by a top ologica l space M endow ed with a contin uous function ϕ , called me asuring function . Such a function is chosen according to applications a nd can b e seen as a descr iptor of the feature s considered relev an t for sha pe characterizatio n. Under these assumptions, the size function ℓ ( M ,ϕ ) asso ciated with the pair ( M , ϕ ) is a de- scriptor of the top ologica l attributes that p ers is t in the sublev el sets of M induced by the v ariation of ϕ . Accor ding to this a pproach, the problem of comparing tw o shap es can be reduced to the simpler c o mparison o f the rela ted size functions. Since their intro duction, these sha pe descripto rs hav e b een widely studied and a pplied in quite a lot o f co ncrete applications c o ncerning Shap e Comparison and Pattern Recognition (cf., e.g., [4, 8, 15, 34, 35, 36]). F rom a more theor etical point of view, the notion of size function plays an esse ntial role since it is strong ly related to the one of natur al pseudo distanc e . This is ano ther k ey to ol of Size Theor y , defining a (dis)similarity measur e b etw een compact and lo cally co nnected top ological spaces endow ed with measuring functions (se e [3] for historical references and [16, 18, 19] for a detailed review ab out the c o ncept of natur a l pseudo distance). Indeed, s ize functions provide easily computable lower b ounds fo r the natur al pseudo distance (cf. [12, 13, 17]). Approximately ten years after the introduction o f Size Theo ry , Persistent Ho - mology re-pro po sed similar ideas fr o m the homologica l p oint o f view (cf. [22]; for a survey on this topic see [21]). In this context, the no tio n of size function c oin- cides with the dimens io n of the 0 -th p ersis tent homolo gy gro up, i.e. the 0-th rank inv ariant [7]. Date : June 11, 2018. 2000 Mathematics Subje ct Classific ation. Pr imary 55N35, 58C05, 68U05; Secondary 49Q10. Key wor ds and phr ases. M ultidimensional size function, Size Theory , T op ological Persistence . 1 2 A. CERRI AND P . FR OSINI W e r efer the interested r eader to App endix A for more informatio n ab out the relationship existing b etw een Size T he o ry and Persistent Homolo gy . The study of T op ologica l Persistence is ca pturing more a nd more attention in the mathematical communit y , with par ticular r eference to the multidimensional setting (see [21, 29]). When dealing with size functions, the term multidimensional means that the measuring functions are vector-v alued, a nd has no refer ence to the dimension of the top olog ical space under study . How e ver, while the basic pr op erties of a size function ℓ are now clear whe n it is asso cia ted with a measuring function ϕ taking v a lues in R , very little is known when ϕ ta kes v a lue s in R k . More precis e ly , some questions ab out the structure of siz e functions asso c ia ted with R k -v alued measuring functions need further inv estigation, with particular reference to the lo calization of their discon tinuit ies. Indeed, this last rese arch line is essential in the developmen t of efficien t algorithms a llowing us to apply T opolog ical P e r sistence to concrete problems in the multidimensional context. In this pap er we s tart to fill this gap by pr oving a new r esult on the dis conti- nu ities of the so -called multidimensional size functions, showing that they c an be lo cated only a t points with at least one pseudo critic al or sp e cial co ordinate (Theo - rem 2.11 and Theor em 2.13). This is pr oved b y using an appr oximation technique and the theoretical machinery developed in [2], improving the compre he ns ion of m ultidimensional T op ological Persistence and laying the basis for its computation. This pap er is organiz e d in tw o sections. In Sec tio n 1 the ba sic re s ults ab out m ultidimensional size functions a r e recalled, while in Section 2 our main theorems are prov e d. 1. Preliminar y Resul ts on Size Theor y The main idea in Size Theor y is to study a g iven shap e by p er forming a g eo- metrical/top olo gical exploration o f a suitable topo lo gical s pa ce M , with resp ect to some prop er ties expr essed by a n R k -v alued contin uous function ~ ϕ = ( ϕ 1 , . . . , ϕ k ) defined on M . F ollowing this approach, Size Theory intro duces the concept of size function as a stable and compact des criptor o f the topolo gical changes o ccurring in the lower level sets { P ∈ M : ϕ i ( P ) ≤ t i , i = 1 , . . . , k } as ~ t = ( t 1 , . . . , t k ) v aries in R k . In this se ction we recall some basic definitions and results ab out size functions , confining ourse lves to those tha t will be useful in the rest of this pap er. F or a deep e r in vestigation o n these to pic s , the reader is re ferred to [2, 3, 28]. F or further details ab out T o po logical Persistence in the multidimensional setting, see [7, 28]. In proving our new results w e need to assume that M is a closed C 1 Riemannian manifold. How ever, we pre fer to rep ort here the basic concepts of Size Theory in their cla ssical formulation, i.e. by supp osing that M is a non-empty compact and lo cally co nnec ted Hausdor ff spa ce. W e sha ll come back to the ca se of a C 1 Riemannian manifold la ter. In the context of Size Theory , any pair ( M , ~ ϕ ), where ~ ϕ = ( ϕ 1 , . . . , ϕ k ) : M → R k is a c o ntin uous function, is calle d a size p air . The function ~ ϕ is said to b e a k -dimensional me asu ring function . The r elations a nd ≺ are defined in R k as follows: for ~ x = ( x 1 , . . . , x k ) and ~ y = ( y 1 , . . . , y k ), we write ~ x ~ y (resp. ~ x ≺ ~ y ) if and only if x i ≤ y i (resp. x i < y i ) for e very index i = 1 , . . . , k . F urthermor e, R k is e quippe d w ith the usual max-nor m: k ( x 1 , x 2 , . . . , x k ) k ∞ = max 1 ≤ i ≤ k | x i | . Now we ar e ready to introduce the concept of size function fo r a s ize pair ( M , ~ ϕ ). W e DISCONTINUITIES OF MUL TIDIMENSIONAL S IZE FUNCTIONS 3 shall deno te the op en set { ( ~ x, ~ y ) ∈ R k × R k : ~ x ≺ ~ y } by ∆ + , w hile ¯ ∆ + will be the closure of ∆ + . F or every k -tuple ~ x = ( x 1 , . . . , x k ) ∈ R k , the set M h ~ ϕ ~ x i will be defined as { P ∈ M : ϕ i ( P ) ≤ x i , i = 1 , . . . , k } . Definition 1.1. F or every k -tuple ~ y = ( y 1 , . . . , y k ) ∈ R k , we shall say that t wo po int s P , Q ∈ M are h ~ ϕ ~ y i - c onn e cte d if and o nly if a co nnected subset of Mh ~ ϕ ~ y i exists, containing P and Q . Definition 1.2. W e sha ll c all the ( k - dimensional) size function asso cia ted with the size pair ( M , ~ ϕ ) the function ℓ ( M , ~ ϕ ) : ∆ + → N , defined by s e tting ℓ ( M , ~ ϕ ) ( ~ x, ~ y ) equal to the n umber of equiv alence classes in which the set Mh ~ ϕ ~ x i is divided by the h ~ ϕ ~ y i -connectedness relatio n. R emark 1.3 . In other words, ℓ ( M , ~ ϕ ) ( ~ x, ~ y ) is equal to the n umber of connected com- po nents in M h ~ ϕ ~ y i cont aining at lea st one po in t of M h ~ ϕ ~ x i . The finitenes s of this num b er is a consequence o f the co mpactness and lo ca l connectedness of M (cf. [26]). In the following, we shall refer to the case of measuring functions taking v alue in R k by using the term “ k -dimensional”. Befor e going on, w e intro duce the follo w ing notations: when ~ y ∈ R k is fixed, the symbo l ℓ ( M , ~ ϕ ) ( · , ~ y ) will b e used to denote the function that takes ea ch k - tuple ~ x ≺ ~ y to the v alue ℓ ( M , ~ ϕ ) ( ~ x, ~ y ). An analog ous conv ention will hold for the symbol ℓ ( M , ~ ϕ ) ( ~ x, · ). R emark 1.4 . F ro m Remark 1.3 it can b e immediately deduced that for e very fixed ~ y ∈ R k the function ℓ ( M ,ϕ ) ( · , ~ y ) is non–decreasing with resp ect to , while for every fixed ~ x ∈ R k the function ℓ ( M ,ϕ ) ( ~ x, · ) is non–increa sing. 1.1. The particular case k = 1. In this section we will disc us s the sp ecific framework of measuring functions tak ing v alues in R , namely the 1-dimensional case. Indeed, Siz e Theory has b een e x tensively develop ed in this setting (cf. [3 ]), showing that each 1-dimensional size function admits a compact representation as a formal series of po in ts and lines of R 2 (cf. [27]). Due to this repre s ent ation, a suitable matching distanc e b etw een 1-dimensio nal size functions can b e easily int ro duced, proving that these descriptors are stable with resp ect to such a distance [11, 13]. Moreover, the role of 1- dimensional size functions is crucial in the approach to the k - dimens ional case prop os ed in [2]. F ollowing the notations use d in the literature a bo ut the cas e k = 1 , the symbols ~ ϕ , ~ x , ~ y , , ≺ will b e replac ed respec tively by ϕ , x , y , ≤ , < . When dea ling with a (1-dimensional) meas uring function ϕ : M → R , the size function ℓ ( M ,ϕ ) asso ciated with ( M , ϕ ) gives infor mation ab o ut the pairs ( Mh ϕ ≤ x i , Mh ϕ ≤ y i ), where Mh ϕ ≤ t i is defined by setting Mh ϕ ≤ t i = { P ∈ M : ϕ ( P ) ≤ t } for t ∈ R . Figure 1 s hows an e xample of a size pair a nd the as so ciated 1-dimensio nal size function. O n the left (Figur e 1( a )) one can find the considered s ize pair ( M , ϕ ), where M is the c ur ve depicted by a solid line, a nd ϕ is the ordinate function. On the right (Figure 1( b )) the a s so ciated 1 -dimensional size function ℓ ( M ,ϕ ) is g iven. As ca n b e seen, the domain ∆ + = { ( x, y ) ∈ R 2 : x < y } is div ide d into b o unded and unbounded r e g ions, in e ach of which the 1-dimensiona l size function takes a constant v alue. The dis play ed num b ers co incide with the v a lues of ℓ ( M ,ϕ ) in each region. F or example, let us now compute the v alue of ℓ ( M ,ϕ ) at the p oint ( a, b ). By applying Remark 1.3 in the case k = 1 , it is sufficient to co unt how many of the 4 A. CERRI AND P . F ROSINI 0 4 3 2 1 3 2 2 P S f r a g r e p la c e m e n t s M ϕ ℓ ( M ,ϕ ) ( a ) ( b ) x y a a b Figure 1. ( a ) The top olog ic al spaces M and the measur ing func- tion ϕ . ( b ) The r elated size function ℓ ( M ,ϕ ) . three connected c o mpo nents in the sublevel Mh ϕ ≤ b i contain at least one p o int of Mh ϕ ≤ a i . It can b e easily verified that ℓ ( M ,ϕ ) ( a, b ) = 2. F ollowing the 1-dimens io nal framew ork, the pro ble m of compar ing t wo size pair s can b e easily tr a nslated into the simpler one of compar ing the related 1-dimensio na l size functions. In [1 3], the matching distanc e d match has been formally prov en to be the most suitable distance betw een these descriptor s. The definition of d match is based on the obs erv ation tha t 1 - dimensional size functions can b e co mpactly describ ed b y a for mal series of p oints and lines lying on the real plane, ca lle d resp ectively pr op er c ornerp oints and c ornerp oints at infinity (or c ornerlines ) a nd defined as follows: Definition 1.5 . F or every point P = ( x, y ) with x < y , consider the n umber µ ( P ) defined as the minimum, over all the p ositive real num b er s ε w ith x + ε < y − ε , of ℓ ( M ,ϕ ) ( x + ε , y − ε ) − ℓ ( M ,ϕ ) ( x − ε , y − ε ) − ℓ ( M ,ϕ ) ( x + ε , y + ε ) + ℓ ( M ,ϕ ) ( x − ε , y + ε ) . When this finite num b er, called multiplicity of P , is strictly p ositive, the p oint P will be called a pr op er c ornerp oint for ℓ ( M ,ϕ ) . Definition 1.6. F or every line r with equatio n x = a , co nsider the num b er µ ( r ) defined as the minimum, ov er all the p ositive real num b ers ε with a + ε < 1 /ε , of ℓ ( M ,ϕ ) ( a + ε, 1 /ε ) − ℓ ( M ,ϕ ) ( a − ε, 1 /ε ) . When this finite num b er, called m ultiplicity of r , is strictly p ositive, the line r will be called a c ornerp oint at infin ity (or c ornerline ) for ℓ ( M ,ϕ ) . The fundamental r ole of pr op er co rnerp oints and co rnerp oints at infinity is ex- plicitly shown in the following Representation Theor em, claiming that their m ulti- plicities co mpletely and univoca lly determine the v alues of 1-dimensional size func- tions. F or the sake of simplicit y , ea ch line of equation x = a will be identified to a p oint at infinit y with co ordinates ( a, ∞ ). Theorem 1.7 (Representation Theorem) . F or every ¯ x < ¯ y < ∞ , it holds that ℓ ( M ,ϕ ) ( ¯ x, ¯ y ) = X x ≤ ¯ x ¯ y 0 it is p oss ible to find a Mo r se measuring function ϕ ε : f M → R such that max Q ∈ f M | ˜ ϕ ( Q ) − ϕ ε ( Q ) | ≤ ε and max Q ∈ f M k∇ ˜ ϕ ( Q ) − ∇ ϕ ε ( Q ) k ≤ ε : W e can obtain ϕ ε by consider ing firs t the smo oth measuring function given by DISCONTINUITIES OF MUL TIDIMENSIONAL S IZE FUNCTIONS 7 the conv o lution of ˜ ϕ and an opp ortune “reg ularizing” function, and then a Morse measuring function ϕ ε approximating in C 1 ( f M , R ) the previous measuring function (cf. [32, Co rollary 6 .8]). Ther efore, from the Matching Stability Theorem 1.10 it follows that for every ε > 0 we ca n find a cornerp o int ( ¯ x ε , ¯ y ε ) for the size function ℓ ( f M ,ϕ ε ) with k ( ¯ x, ¯ y ) − ( ¯ x ε , ¯ y ε ) k ∞ ≤ ε and ¯ x ε , ¯ y ε as critical v a lues for ϕ ε . Passing to the limit for ε → 0 we obtain that b oth ¯ x and ¯ y are critical v alues for ˜ ϕ . The claim follows by o bserving that, since ˜ ϕ and ϕ hav e the same cr itical v alues , b o th ¯ x and ¯ y are also critical v a lues for ϕ . F rom the Representation Theorem 1.7 and Theore m 1.11 we ca n obtain the following co r ollary , refining Coro llary 1.9 in the C 1 case (we skip the ea sy pro of ): Corollary 1.1 2. L et M b e a close d C 1 Rie mannian manifold, and let ϕ : M → R b e a C 1 me asuring function. L et also ( ¯ x, ¯ y ) b e a disc ontinuity p oint for ℓ ( M ,ϕ ) . Then at le ast one of the fol lowing statements holds: (i): ¯ x is a disc ontinuity p oint for ℓ ( M ,ϕ ) ( · , ¯ y ) and ¯ x is a critic al value for ϕ ; (ii): ¯ y is a disc ontinuity p oint for ℓ ( M ,ϕ ) ( ¯ x, · ) and ¯ y is a critic al value for ϕ . The generalizatio n of Corollary 1 .12 in the k - dimens io nal setting is not so simple and requires some new idea s which are given in Section 2, which also provides our main results. 1.2. Reduction to the 1-di mensio n al case. W e ar e now ready to r eview the approach to m ultidimensional Size Theory pr op osed in [2]. In that w ork, the authors prov e that the case k > 1 can be r educed to the 1- dimensional framework by a change of v ariable and the use of a s uita ble fo lia tion. In particular, they show that there exis ts a pa r ameterized family o f ha lf-planes in R k × R k such tha t the restriction of a k -dimensional siz e function ℓ ( M , ~ ϕ ) to each o f thes e ha lf-planes c a n be seen as a particular 1-dimensional size function. The motiv ations at the basis of this approa ch mov e from the fact that the concepts of pro per corner po int a nd cornerp oint at infinit y , defined for 1-dimensio na l size functions, a ppe ar not e asily generaliza ble to an arbitrary dimension (namely the case k > 1). As a c o nsequence, at a first glance it does not seem po ssible to obtain the multidim ensional a nalogue of the matching distance d match and therefore it is not clea r how to g e neralize the Matching Stability Theorem 1 .10. O n the other hand, all these problems ca n b e bypassed by means of the results we recall in the rest of this subsection. Definition 1. 13. F or every unit vector ~ l = ( l 1 , . . . , l k ) of R k such that l i > 0 for i = 1 , . . . , k , and for every vector ~ b = ( b 1 , . . . , b k ) of R k such that P k i =1 b i = 0, w e shall say that the pair ( ~ l , ~ b ) is admissible . W e shall deno te the set of all admissible pairs in R k × R k by Adm k . Given a n admissible pair ( ~ l, ~ b ), w e define the half-plane π ( ~ l, ~ b ) of R k × R k by the follo wing para metric equations: ( ~ x = s ~ l + ~ b ~ y = t ~ l + ~ b for s, t ∈ R , with s < t . The follo wing pro p o s ition implies that the collection of half-planes giv en in Def- inition 1.1 3 is a ctually a foliatio n of ∆ + . 8 A. CERRI AND P . F ROSINI Prop ositi o n 1. 14. F or every ( ~ x, ~ y ) ∈ ∆ + ther e exists one and only one admissib le p air ( ~ l , ~ b ) such that ( ~ x, ~ y ) ∈ π ( ~ l, ~ b ) . Now we can show the reduction to the 1-dimensio nal case. Theorem 1. 1 5 (Reduction Theorem) . L et ( ~ l , ~ b ) b e an admissible p air, and F ~ ϕ ( ~ l, ~ b ) : M → R b e define d by set ting F ~ ϕ ( ~ l, ~ b ) ( P ) = max i =1 ,...,k ϕ i ( P ) − b i l i . Then, for every ( ~ x, ~ y ) = ( s ~ l + ~ b, t ~ l + ~ b ) ∈ π ( ~ l, ~ b ) the fol lowing e quality holds: ℓ ( M , ~ ϕ ) ( ~ x, ~ y ) = ℓ ( M ,F ~ ϕ ( ~ l, ~ b ) ) ( s, t ) . In the following, we shall use the sy m b ol F ~ ϕ ( ~ l, ~ b ) in the se ns e of the Re ductio n Theorem 1.15. R emark 1.1 6 . In plain words, the Reduction Theor em 1.15 states that each mul- tidimensional s iz e function corr e sp o nds to a 1-dimensional size function o n each half-plane of the given foliation. It follows that ea ch multidimensional siz e func- tion can b e r e presented as a parameterize d family of formal ser ies of p oints a nd lines, following the description introduced in Subsection 1.1 for the case k = 1. In- deed, it is possible to asso ciate a fo r mal series σ ( ~ l, ~ b ) with each admissible pair ( ~ l , ~ b ), with σ ( ~ l, ~ b ) describing the 1-dimensional s ize function ℓ ( M ,F ~ ϕ ( ~ l, ~ b ) ) . The r efore, on each half-plane π ( ~ l, ~ b ) , the matc hing distance d match and the Matc hing Stability Theo rem 1.10 can be applied. Moreover, the family n σ ( ~ l, ~ b ) : ( ~ l, ~ b ) ∈ Adm k o turns out to be a complete descr iptor for ℓ ( M , ~ ϕ ) , sinc e tw o multidimensional size functions co incide if and only if the cor resp onding parameter ized families of forma l series coincide. Before pro ceeding, we now introduce an example s howing how the Reduction Theorem 1.15 works. Example 1. 17. In R 3 consider the set Q = [ − 1 , 1] × [ − 1 , 1 ] × [ − 1 , 1] and the unit sphere S 2 of e q uation x 2 + y 2 + z 2 = 1. Let a lso ~ Φ = (Φ 1 , Φ 2 ) : R 3 → R 2 be the contin uous function, defined as ~ Φ( x, y , z ) = ( | x | , | z | ). In this setting, c o nsider the size pairs ( M , ~ ϕ ) a nd ( N , ~ ψ ) wher e M = ∂ Q , N = S 2 , a nd ~ ϕ and ~ ψ are resp ectively the r estrictions o f ~ Φ to M and N . In order to co mpare the size functions ℓ ( M , ~ ϕ ) and ℓ ( N , ~ ψ ) , we are interested in studying the foliation in half- pla nes π ( ~ l, ~ b ) , where ~ l = (cos θ , sin θ ) with θ ∈ (0 , π 2 ), and ~ b = ( a, − a ) with a ∈ R . Any such half-plane is represented b y x 1 = s cos θ + a x 2 = s sin θ − a y 1 = t cos θ + a y 2 = t sin θ − a , with s, t ∈ R , s < t . Figure 3 shows the size functions ℓ ( M ,F ~ ϕ ( ~ l, ~ b ) ) and ℓ ( N ,F ~ ψ ( ~ l, ~ b ) ) , for θ = π 4 and a = 0, i.e. ~ l = √ 2 2 , √ 2 2 and ~ b = (0 , 0 ). With this choice, we obta in that F ~ ϕ ( ~ l, ~ b ) = √ 2 max { ϕ 1 , ϕ 2 } = √ 2 max { | x | , | z |} and F ~ ψ ( ~ l, ~ b ) = √ 2 max { ψ 1 , ψ 2 } = DISCONTINUITIES OF MUL TIDIMENSIONAL S IZE FUNCTIONS 9 0 2 1 1 1 P S f r a g r e p la c e m e n t s t = √ 2 t = 1 M N ℓ ( M ,F ~ ϕ ( ~ l, ~ b ) ) ℓ ( N , F ~ ψ ( ~ l , ~ b ) ) x y z s t 0 2 1 P S f r a g r e p la c e m e n t s t = √ 2 t = 1 M N ℓ ( M , F ~ ϕ ( ~ l , ~ b ) ) ℓ ( N ,F ~ ψ ( ~ l, ~ b ) ) x y z s t Figure 3. The top o logical spaces M and N and the size functions ℓ ( M ,F ~ ϕ ( ~ l, ~ b ) ) , ℓ ( N ,F ~ ψ ( ~ l, ~ b ) ) asso ciated with the half-plane π ( ~ l, ~ b ) , for ~ l = ( √ 2 2 , √ 2 2 ) and ~ b = (0 , 0 ). √ 2 max { | x | , | z |} . Ther efore, Theor em 1.1 5 implies that, for every ( x 1 , x 2 , y 1 , y 2 ) ∈ π ( ~ l, ~ b ) , we ha ve ℓ ( M , ~ ϕ ) ( x 1 , x 2 , y 1 , y 2 ) = ℓ ( M , ~ ϕ ) s √ 2 , s √ 2 , t √ 2 , t √ 2 = ℓ ( M ,F ~ ϕ ( ~ l, ~ b ) ) ( s, t ) ℓ ( N , ~ ψ ) ( x 1 , x 2 , y 1 , y 2 ) = ℓ ( N , ~ ψ ) s √ 2 , s √ 2 , t √ 2 , t √ 2 = ℓ ( N ,F ~ ψ ( ~ l, ~ b ) ) ( s, t ) . The matching distance d match ( ℓ ( M ,F ~ ϕ ( ~ l, ~ b ) ) , ℓ ( N ,F ~ ψ ( ~ l, ~ b ) ) ) is equal to √ 2 − 1, i.e. the cost of mo ving the point of coor dinates (0 , √ 2) o nto the p oint of coo rdinates (0 , 1), computed with resp ect to the max-nor m. The po ints (0 , √ 2) and (0 , 1 ) are represen- tative of the characteristic tr iangles of the size functions ℓ ( M ,F ~ ϕ ( ~ l, ~ b ) ) and ℓ ( N ,F ~ ψ ( ~ l, ~ b ) ) , resp ectively . Note that the match ing dista nc e computed for ~ l = √ 2 2 , √ 2 2 and ~ b = (0 , 0) induces a pseudo dis tance. This means that, even b y consider ing just one half-plane o f the foliation, it is p os s ible to effectiv ely compare multidimensional size functions. W e c o nclude by observing that ℓ ( M ,ϕ 1 ) ≡ ℓ ( N ,ψ 1 ) and ℓ ( M ,ϕ 2 ) ≡ ℓ ( N ,ψ 2 ) . 10 A. CERRI AND P . F ROSINI In other words, the m ultidimensiona l size functions, with r esp ect to ~ ϕ, ~ ψ , are able to discriminate the c ub e and the s pher e, while b oth the 1- dimens io nal size functions, with resp ect to ϕ 1 , ϕ 2 and ψ 1 , ψ 2 , cannot do that. This higher discriminatory pow er of multidimensional size functions gives a further motiv ation for their definition and use. The nex t re sult pr ov es the stability o f d match with r e s pe c t to the choice of the half-planes of the folia tion. Indeed, the next prop o s ition states tha t small enough changes in ( ~ l , ~ b ) with resp ect to the max-norm induce small changes o f ℓ ( M ,F ~ ϕ ( ~ l, ~ b ) ) with resp ect to the matching distance. Prop ositi o n 1. 18. If ( M , ~ ϕ ) is a size p air, ( ~ l , ~ b ) ∈ Adm k and ε is a r e al n umb er with 0 < ε < min i =1 ,...,k l i , then for every admissible p air ( ~ l ′ , ~ b ′ ) with k ( ~ l, ~ b ) − ( ~ l ′ , ~ b ) k ∞ ≤ ε , it holds t hat d match ( ℓ ( M ,F ~ ϕ ( ~ l, ~ b ) ) , ℓ ( M ,F ~ ϕ ( ~ l ′ , ~ b ′ ) ) ) ≤ ε · max P ∈M k ~ ϕ ( P ) k ∞ + k ~ l k ∞ + k ~ b k ∞ min i =1 ,...,k { l i ( l i − ε ) } . R emark 1.19 . Analogous ly , it is p ossible to prove (cf. [2 , Prop. 2]) that d match is stable with resp ect to the chosen meas uring function, i.e. that s mall enoug h changes in ~ ϕ with resp ect to the max-norm induce small c hanges o f ℓ ( M ,F ~ ϕ ( ~ l, ~ b ) ) with resp ect to the ma tch ing distance. Prop ositio n 1.18 and Remark 1.19 guara nt ee the stability of this approa ch. 2. Main Resul ts In this s ection we are going to prove some new r e s ults ab out the disco nt inuit ies of multidimensional size functions. In order to do that, we will confine ourselves to the case of a size pair ( M , ~ ϕ ), where M is a clo sed C 1 Riemannian m -manifold. F rom now to Theo rem 2.1 1 we shall ass ume that an admissible pa ir ( ~ l , ~ b ) ∈ Adm k is fix ed, co nsidering the 1-dimensional size function ℓ ( M ,F ) , where F ( Q ) = max i =1 ,...,k ϕ i ( Q ) − b i l i . W e shall say that F and ℓ ( M ,F ) are the (1- dimens io nal) mea - suring function and the siz e function corresp onding to the half-plane π ( ~ l, ~ b ) , respec - tively . The main results of this section are stated in Theo rem 2 .11 a nd Theor em 2 .13, showing a necessar y condition for a p oint ( ~ x, ~ y ) ∈ ∆ + to b e a discontin uity p oint for the size function ℓ ( M , ~ ϕ ) , under the assumption that ~ ϕ is C 1 and C 0 , resp ectively . F or the sak e of clarity , we will now provide a sk etch of the ar guments that will lead us to the pro of of our main res ults. Theorem 2.1 1 is a gener alization in the k -dimensional s etting of Corolla r y 1.12, stating that each disco nt inuit y po int for a 1-dimensiona l siz e function ℓ ( M ,ϕ ) , re- lated to a C 1 measuring function ϕ , is such that a t lea st one o f its co ordina tes is a cr itical v alue for ϕ . W e recall that Corollar y 1.12 directly descends from the Representation Theorem 1.7 and from Theorem 1 .1 1, according to which each finite co ordinate of a cornerp oint for ℓ ( M ,ϕ ) has to be a critica l v alue for ϕ . Our first goal is to prove th at a modified v ersion of this last s tatement holds for the 1-dimensio nal size function ℓ ( M ,F ) corres p o nding to the half-plane π ( ~ l, ~ b ) . The reaso n for such an adaptation is that the 1 - dimensional measuring function F is not C 1 (even in ca se ~ ϕ is C 1 ), and therefore we nee d to genera lize the concepts o f cr itical p oint and DISCONTINUITIES OF MUL TIDIMENSIONAL S IZE FUNCTIONS 11 critical v alue by introducing the definitions o f ( ~ l , ~ b ) -pseudo critic al p oint and ( ~ l , ~ b ) - pseudo critic al value for a C 1 function (Definition 2 .1). These notions, together with an appr oximation in C 0 ( M , R ) of the function F by C 1 functions, are used to prov e that, if ~ ϕ ∈ C 1 ( M , R k ), each finite co ordinate of a corner p oint for ℓ ( M ,F ) has to be an ( ~ l , ~ b )-pseudo critical v a lue for ~ ϕ (Theorem 2.3). Next, w e show (P rop osition 2.4) that a corresp ondence exis ts betw ee n the discontin uity po int s of ℓ ( M ,F ) and the ones o f ℓ ( M , ~ ϕ ) . Theorem 2.3 and Pr op osition 2.4 lead us to the rela tion (Theor em 2.7) b etw een the discontin uity points for ℓ ( M , ~ ϕ ) , lying o n the half-plane π ( ~ l, ~ b ) , and the ( ~ l , ~ b )-pseudo critical v a lues for ~ ϕ . This last r e sult is refined in Theo rem 2.1 1 under the assumption that ~ ϕ is C 1 , providing a nece ssary condition for discontin u- ities of ℓ ( M , ~ ϕ ) that do es not dep end on the half-planes of the foliation. This ca n be done by in tro ducing the c o ncepts of pseudo critic al p oint and pseudo critic al value for an R k -v alued C 1 function (Definition 2.8), and consider ing a suita ble pro jectio n ρ : R k → R h . The necessa ry condition given in Theor em 2.11 is finally ge ne r alized to the case of contin uous measuring functions (Theorem 2.13), once mor e b y mea ns of an approximation tech nique, and the notions of sp e cial p oint a nd sp e cial value . Before go ing on, we need the following definition: Definition 2.1. Assume that ~ ϕ ∈ C 1 ( M , R k ). F or e very Q ∈ M , set I Q = n i ∈ { 1 , . . . , k } : ϕ i ( Q ) − b i l i = F ( Q ) o . W e shall say that Q is a n ( ~ l , ~ b ) -pseudo critic al p oint for ~ ϕ if the conv ex hull of the g radients ∇ ϕ i ( Q ), i ∈ I Q , contains the nu ll vector, i.e. for ev er y i ∈ I Q there exis ts a real v alue λ i such that P i ∈ I Q λ i ∇ ϕ i ( Q ) = 0 , w ith 0 ≤ λ i ≤ 1 and P i ∈ I Q λ i = 1. If Q is an ( ~ l , ~ b )-pseudo critical p oint for ~ ϕ , the v alue F ( Q ) will b e ca lled an ( ~ l , ~ b ) -pseudo critic al value for ~ ϕ . R emark 2.2 . The conce pt o f ( ~ l , ~ b )-pseudo critical p oint is strongly c o nnected, via the function F introduced in Definition 2.1, with the no tion of gener alized gradient int ro duced by F. H. Clar ke [9]. F or a po int Q ∈ M , the condition of b eing ( ~ l , ~ b )- pseudo critical for ~ ϕ cor resp onds to the one of b eing “ critical” for the generalized gradient of F [9, Pro p. 2.3 .12]. How ever, in this context we pr efer to adopt a terminology highlighting the dep endence o n the consider ed half-plane. W e can now state our first result. Theorem 2.3. Assume that ~ ϕ ∈ C 1 ( M , R k ) . If ( σ, τ ) is a pr op er c ornerp oint of ℓ ( M ,F ) , then b oth σ and τ ar e ( ~ l , ~ b ) -pseudo critic al values for ~ ϕ . If ( σ, ∞ ) is a c ornerp oint at infi n ity of ℓ ( M ,F ) , then σ is an ( ~ l , ~ b ) -pseudo critic al value for ~ ϕ . Pr o of. W e confine ourselves to proving the fo r mer statement, since the pr o of of the latter is analogous. The idea is to show that our thesis ho lds for a C 1 function ap- proximating the measuring function F : M → R in C 0 ( M , R ), and verify tha t this prop erty pass es to the limit. Let us no w set Φ i ( Q ) = ϕ i ( Q ) − b i l i and c ho ose c ∈ R such that min Q ∈M Φ i ( Q ) > − c , for every i = 1 , . . . , k . Consider the function seq uence ( F p ), p ∈ N + = N \ { 0 } , wher e F p : M → R and F p ( Q ) = P k i =1 (Φ i ( Q ) + c ) p 1 p − c : Such a seq uence conv erg es uniformly to the function F . Indeed, for every Q ∈ M 12 A. CERRI AND P . F ROSINI and for every index p we hav e that | F ( Q ) − F p ( Q ) | = max i Φ i ( Q ) − k X i =1 (Φ i ( Q ) + c ) p ! 1 p − c ! = = max i { Φ i ( Q ) + c } − k X i =1 (Φ i ( Q ) + c ) p ! 1 p = = k X i =1 (Φ i ( Q ) + c ) p ! 1 p − max i { Φ i ( Q ) + c } ≤ ≤ max i { Φ i ( Q ) + c } · ( k 1 p − 1) . Let us now consider a prop er cor nerp oint ¯ C o f the siz e function ℓ ( M ,F ) . By the Matching Stability Theorem 1.10 it follows that it is pos sible to find a large enough p and a prop er cornerp oint C p of the 1-dimensio nal size function ℓ ( M ,F p ) (asso ciated with the siz e pair ( M , F p )) such that C p is ar bitrarily clo se to ¯ C . S ince C p is a prop er cornerp oint of ℓ ( M ,F p ) , it follows from Theorem 1.11 that its co o r dinates a re critical v a lues of the C 1 function F p . By fo cusing our attention on the a bscissa of C p (analogo us considerations hold for the ordinate of C p ) it follows that there exists Q p ∈ M with x ( C p ) = F p ( Q p ) and (in resp ect to lo cal co o rdinates x 1 , . . . , x m of the m -manifold M ) 0 = ∂ F p ∂ x 1 ( Q p ) = k X i =1 (Φ i ( Q p ) + c ) p ! 1 − p p · k X i =1 (Φ i ( Q p ) + c ) p − 1 · ∂ Φ i ∂ x 1 ( Q p ) ! . . . 0 = ∂ F p ∂ x m ( Q p ) = k X i =1 (Φ i ( Q p ) + c ) p ! 1 − p p · k X i =1 (Φ i ( Q p ) + c ) p − 1 · ∂ Φ i ∂ x m ( Q p ) ! . Hence we ha ve k X i =1 (Φ i ( Q p ) + c ) p − 1 · ∂ Φ i ∂ x 1 ( Q p ) = 0 . . . k X i =1 (Φ i ( Q p ) + c ) p − 1 · ∂ Φ i ∂ x m ( Q p ) = 0 . Therefore, by setting v p = ( v 1 p , . . . , v k p ) = (Φ 1 ( Q p ) + c ) p − 1 , . . . , (Φ k ( Q p ) + c ) p − 1 , we can write t J ( Q p ) · t v p = 0 , where J ( Q p ) is the Jacobian matr ix of ~ Φ = (Φ 1 , . . . , Φ k ) computed at the p oint Q p . By the compactness of M , we can assume (po s si- bly by extracting a subsequence ) that ( Q p ) co nv erge s to a p oint ¯ Q . Let us de- fine u p = v p k v p k ∞ . By compactness (r ecall that k u p k ∞ = 1) we c a n also as sume (po ssibly by considering a s ubsequence) that the sequence ( u p ) conv erg es to a DISCONTINUITIES OF MUL TIDIMENSIONAL S IZE FUNCTIONS 13 vector ¯ u = ( ¯ u 1 , . . . , ¯ u k ), where ¯ u i = lim p →∞ v i p k v p k ∞ and k ¯ u k ∞ = 1. Obviously t J ( Q p ) · t u p = 0 and hence we hav e t J ( ¯ Q ) · t ¯ u = 0 . (2.1) Since for every index p and for every i = 1 , . . . , k the relatio n 0 < u i p ≤ 1 holds, for ea ch i = 1 , . . . , k the condition 0 ≤ ¯ u i = lim p →∞ u i p ≤ 1 is sa tis fied. Let us now recall that F ( ¯ Q ) = max i Φ i ( ¯ Q ), b y definition, and cons ider the set I ¯ Q = { i ∈ { 1 , . . . , k } : Φ i ( ¯ Q ) = F ( ¯ Q ) } = { i 1 , . . . , i h } . F or every r 6∈ I ¯ Q the comp onent ¯ u r is e qual to 0, since 0 ≤ u r p = Φ r ( Q p )+ c max i { Φ r ( Q p )+ c } p − 1 and lim p →∞ Φ r ( Q p )+ c max i { Φ r ( Q p )+ c } = Φ r ( ¯ Q ) + c F ( ¯ Q ) + c , which is strictly less tha n 1 for Φ r ( ¯ Q ) < F ( ¯ Q ). Hence we hav e ¯ u = ¯ u i 1 · e i 1 + · · · + ¯ u i h · e i h , where e i is the i th vector of the standard basis of R k . Thus, from equa lity (2.1) we hav e P h j =1 ¯ u i j · ∂ Φ i j ∂ x 1 ( ¯ Q ) = 0 , . . . , P h j =1 ¯ u i j · ∂ Φ i j ∂ x m ( ¯ Q ) = 0 , that is P h j =1 ¯ u i j l i j · ∂ ϕ i j ∂ x 1 ( ¯ Q ) = 0 , . . . , P h j =1 ¯ u i j l i j · ∂ ϕ i j ∂ x m ( ¯ Q ) = 0 , since Φ i = ϕ − b i l i . Hence, P h j =1 ¯ u i j l i j ∇ ϕ i j ( ¯ Q ) = 0 . By recalling that ¯ u i j ≥ 0, l i j > 0 and ¯ u is a non–v anishing vector, it fo llows immediately that P h j =1 ¯ u i j l i j > 0 and ther efore the conv ex hull of the gra dients ∇ ϕ i 1 ( ¯ Q ) , . . . , ∇ ϕ i h ( ¯ Q ) contains the null vector. Th us, ¯ Q is an ( ~ l , ~ b )- pseudo critical p oint for ~ ϕ and hence F ( ¯ Q ) is an ( ~ l , ~ b )-pseudo critical v alue for ~ ϕ . Moreov er, fro m the uniform conv e r gence o f the sequence ( F p ) to F a nd fro m the contin uity of the function F , we hav e (reca ll that ¯ C = lim p →∞ C p ) x ( ¯ C ) = lim p →∞ x ( C p ) = lim p →∞ F p ( Q p ) = F ( ¯ Q ) . In other words, the a bscissa x ( ¯ C ) of a proper corner po int of ℓ ( M ,F ) is the imag e of an ( ~ l , ~ b )-pseudo critical po in t ¯ Q through F , i.e. a n ( ~ l, ~ b )-pseudo critical v alue for ~ ϕ . An analo g ous reasoning holds for the ordinate y ( ¯ C ) of a prop er corne r p oint. Our next result shows that eac h discontin uity of ℓ ( M , ~ ϕ ) corres p o nds to a dis con- tin uit y o f the 1 -dimensional size function asso ciated with a suitable half-plane of the foliation. Prop ositi o n 2. 4. A p oint ( ~ x, ~ y ) = ( s · ~ l + ~ b, t · ~ l + ~ b ) ∈ π ( ~ l, ~ b ) is a disc ontinu ity p oint for ℓ ( M , ~ ϕ ) if and only if ( s, t ) is a disc ontinuity p oint for ℓ ( M ,F ) . Pr o of. Obviously , if ( s, t ) is a disco nt inuit y p oint for ℓ ( M ,F ) , then ( ~ x, ~ y ) = ( s · ~ l + ~ b, t · ~ l + ~ b ) ∈ π ( ~ l, ~ b ) is a discontin uity point fo r ℓ ( M , ~ ϕ ) , b ecause of the Reduction Theorem 1.15. In or der to prov e the inv er se implication, we shall verify the contrapo sitive statement, i.e. if ( s, t ) is not a discontin uity p oint for ℓ ( M ,F ) , then ( s · ~ l + ~ b, t · ~ l + ~ b ) is not a discontin uity p oint for ℓ ( M , ~ ϕ ) . Indeed, if ( s, t ) is not a dis c o ntin uity p oint for ℓ ( M ,F ) , then ℓ ( M ,F ) is loca lly co nstant at ( s, t ) (recall that eac h siz e function is natural–v alued). Therefore it will be po ssible to choo se a real num b er η > 0 suc h that ℓ ( M ,F ) ( s − η , t + η ) = ℓ ( M ,F ) ( s + η , t − η ) . (2.2) Before pro ce eding in our pro of, w e need the following result: 14 A. CERRI AND P . F ROSINI Lemma 2.5 . L et ( M , ψ ) , ( M , ψ ′ ) b e two size p airs, with ψ , ψ ′ : M → R . If d match ℓ ( M ,ψ ) , ℓ ( M ,ψ ′ ) ≤ 2 ε , then it holds that ℓ ( M ,ψ ) ( s − ε, t + ε ) ≤ ℓ ( M ,ψ ′ ) ( s + ε, t − ε ) , for every ( s, t ) with s + ε < t − ε . Pr o of of L emma 2.5. Let ∆ ∗ be the set given b y ∆ + ∪ { ( a, ∞ ) : a ∈ R } . F or every ( s, t ) with s < t , let us define the se t L ( s,t ) = { ( σ, τ ) ∈ ∆ ∗ : σ ≤ s, τ > t } . By the Representation Theo rem 1 .7 we hav e that ℓ ( M ,ψ ) ( s − ε, t + ε ) e quals the nu mber of prop er co rnerp oints a nd corner p o ints at infinity for ℓ ( M ,ψ ) belo nging to the set L ( s − ε,t + ε ) . Since d match ℓ ( M ,ψ ) , ℓ ( M ,ψ ′ ) ≤ 2 ε , the num b er of prop er cornerp oints and cor nerp oints at infinity for ℓ ( M ,ψ ′ ) in the set L ( s + ε,t − ε ) is no t less than ℓ ( M ,ψ ) ( s − ε, t + ε ). The r eason is that the change from ψ to ψ ′ do es not mov e the cornerp oints more than 2 ε , with resp ect to the max-nor m, bec a use of the Matching Stability Theor e m 1 .10. By applying the Representation Theo rem 1.7 once aga in to ℓ ( M ,ψ ′ ) , we get our thesis . Let us go back to the pro of of Prop osition 2.4. By Prop osition 1.18, we can then consider a real v a lue ε = ε ( η ) with 0 < ε < min i =1 ,...,k l i such that f or every admissi- ble pa ir ( ~ l ′ , ~ b ′ ) with ( ~ l , ~ b ) − ( ~ l ′ , ~ b ′ ) ∞ ≤ ε , the relation d match ( ℓ ( M ,F ) , ℓ ( M ,F ′ ) ) ≤ η 2 holds, where ℓ ( M ,F ′ ) is the 1 -dimensional size function cor resp onding to the half- plane π ( ~ l ′ , ~ b ′ ) . By applying Lemma 2.5 twice and the monotonicity of ℓ ( M ,F ′ ) in each v aria ble (cf. Remark 1 .4), we get the inequalities ℓ ( M ,F ) ( s − η , t + η ) ≤ ℓ ( M ,F ′ ) ( s − η 2 , t + η 2 ) ≤ ℓ ( M ,F ′ ) ( s + η 2 , t − η 2 ) ≤ ℓ ( M ,F ) ( s + η , t − η ) . (2.3) Because of equa lity (2.2 ) we ha ve that the inequalities (2.3 ) imply ℓ ( M ,F ) ( s − η , t + η ) = ℓ ( M ,F ′ ) ( s − η 2 , t + η 2 ) = ℓ ( M ,F ′ ) ( s + η 2 , t − η 2 ) = ℓ ( M ,F ) ( s + η , t − η ) . (2.4) Therefore, o nce again beca use of the mono to nicit y of ℓ ( M ,F ′ ) in ea ch v ar ia ble, for every ( s ′ , t ′ ) with k ( s, t ) − ( s ′ , t ′ ) k ∞ ≤ η 2 and for every ( ~ l ′ , ~ b ′ ) with k ( ~ l, ~ b ) − ( ~ l ′ , ~ b ′ ) k ∞ ≤ ε the equality ℓ ( M ,F ′ ) ( s ′ , t ′ ) = ℓ ( M ,F ) ( s, t ) holds. By applying the Reduction Theorem 1.15 w e get ℓ ( M , ~ ϕ ) ( s ′ · ~ l ′ + ~ b ′ , t ′ · ~ l ′ + ~ b ′ ) = ℓ ( M , ~ ϕ ) ( s · ~ l + ~ b, t · ~ l + ~ b ). In other words, ℓ ( M , ~ ϕ ) is lo cally consta nt at the p oint ( ~ x, ~ y ), and hence ( ~ x, ~ y ) is not a discontin uity point for ℓ ( M , ~ ϕ ) . R emark 2.6 . L e t us observe tha t Prop ositio n 2.4 holds under w e aker hypotheses, i.e. in the case that M is a no n-empt y , c o mpact and lo cally co nnected Hausdorff space. How ever, for the sake of s implicit y , we pr efer her e to confine ourselves to the setting as s umed at the beg inning of the present section. The following theorem asso ciates the dis contin uities of a multidimensional s ize function to the ( ~ l , ~ b )-pseudo critical v alues o f ~ ϕ . Theorem 2. 7 . L et ( ~ x, ~ y ) ∈ ∆ + with ( ~ x, ~ y ) = ( s · ~ l + ~ b, t · ~ l + ~ b ) ∈ π ( ~ l, ~ b ) . If ( ~ x, ~ y ) is a disc ontinuity p oint for ℓ ( M , ~ ϕ ) then at le ast one of the fol lowing statement s holds: ( i ) : s is a disc ontinu ity p oint for ℓ ( M ,F ) ( · , t ) ; DISCONTINUITIES OF MUL TIDIMENSIONAL S IZE FUNCTIONS 15 ( ii ) : t is a disc ontinu ity p oint for ℓ ( M ,F ) ( s, · ) . Mor e over, ( i ) and ( ii ) ar e e qu ivalent to ( i ′ ) : ~ x is a disc ontinuity p oint for ℓ ( M , ~ ϕ ) ( · , ~ y ) ; ( ii ′ ) : ~ y is a disc ontinu ity p oint for ℓ ( M , ~ ϕ ) ( ~ x, · ) , r esp e ctively. If ~ ϕ ∈ C 1 ( M , R k ) , statement ( i ) implies that s is an ( ~ l , ~ b ) -pseudo criti- c al value for ~ ϕ , and statement ( ii ) implies that t is an ( ~ l, ~ b ) -pseudo critic al value for ~ ϕ . Pr o of. By P rop osition 2.4 we hav e that ( s, t ) is a discon tin uity point for ℓ ( M ,F ) , and from Coro llary 1.9 it follows tha t either s is a discontin uity point for ℓ ( M ,F ) ( · , t ) or t is a discontin uity po int for ℓ ( M ,F ) ( s, · ), or b oth these conditions hold, th us proving the first par t of the theo rem. Let us now supp ose tha t s is a dis contin uity p oint for ℓ ( M ,F ) ( · , t ). Since the function ℓ ( M ,F ) ( · , t ) is monotonic, then for every real v alue ε > 0 we have that ℓ ( M ,F ) ( s − ε, t ) 6 = ℓ ( M ,F ) ( s + ε, t ). Mor eov er , the following equalities hold b ecause of the Reduction Theorem 1.1 5: ℓ ( M ,F ) ( s − ε, t ) = ℓ ( M , ~ ϕ ) (( s − ε ) · ~ l + ~ b, t · ~ l + ~ b ) = ℓ ( M , ~ ϕ ) ( ~ x − ε · ~ l, ~ y ) ℓ ( M ,F ) ( s + ε, t ) = ℓ ( M , ~ ϕ ) (( s + ε ) · ~ l + ~ b, t · ~ l + ~ b ) = ℓ ( M , ~ ϕ ) ( ~ x + ε · ~ l , ~ y ) . (2.5) By setting ~ ε = ε · ~ l , we get ℓ ( M , ~ ϕ ) ( ~ x − ~ ε , ~ y ) 6 = ℓ ( M , ~ ϕ ) ( ~ x + ~ ε , ~ y ). Therefor e ~ x is a discontin uity point for ℓ ( M , ~ ϕ ) ( · , ~ y ), thus proving that ( i ) ⇒ ( i ′ ). Let us now prov e that ( i ′ ) ⇒ ( i ). If ~ x is a discontin uity p oint fo r ℓ ( M , ~ ϕ ) ( · , ~ y ), from the monotonicity in the v ar iable ~ x (cf. Remar k 1.4) it follows that ℓ ( M , ~ ϕ ) ( ~ x − ε · ~ l , ~ y ) 6 = ℓ ( M , ~ ϕ ) ( ~ x + ε · ~ l, ~ y ) for every ε > 0. The r efore, b ecause of the equalities (2.5) w e get ℓ ( M ,F ) ( s − ε, t ) 6 = ℓ ( M ,F ) ( s + ε, t ), proving that ( i ′ ) ⇒ ( i ). Analogo usly , we ca n show that ( ii ) ⇔ ( ii ′ ). F urthermore, if s is a discontin uity p oint for ℓ ( M ,F ) ( · , t ), from the Represen- tation Theo rem 1.7 it follows that s is the a bscissa o f a cor nerp oint (p ossibly a t infinit y). Hence, if ~ ϕ ∈ C 1 ( M , R k ) then by Theorem 2 .3 we hav e tha t s is an ( ~ l, ~ b )-pseudo critical v a lue for ~ ϕ . In a similar wa y , we ca n ex amine the c ase that t is a disco ntin uity p oint for ℓ ( M ,F ) ( s, · ), and g et the final statement. Before giving the first o f our main r esults, we need the following definition. Definition 2.8. Let ~ ξ : M → R h , and supp ose that ~ ξ is C 1 at a po int Q ∈ M . The po int Q is said to b e a pseudo critic al p oint for ~ ξ if the convex hull o f the gradients ∇ ξ i ( Q ), i = 1 , . . . , h , contains the null vector, i.e . there e x ist λ 1 , . . . , λ h ∈ R such that P h i = i λ i · ∇ ξ i ( Q ) = 0 , with 0 ≤ λ i ≤ 1 and P h i =1 λ i = 1. If Q is a pseudocritica l po int of ~ ξ , then ~ ξ ( Q ) will b e called a pseudo critic al value for ~ ξ . R emark 2.9 . Definition 2.8 corr esp onds to the F ritz John nec essary co ndition for optimality in Nonlinear P rogra mming [1]. W e sha ll use the term “pseudo critical” just for the sa ke o f concisenes s . F or further refere nce s see [3 3]. The co nc e pt o f pseudo critical p oint is strong ly related also to the one of Jacobi Set (cf. [20]). The next example makes Definition 2.8 clear e r. Example 2. 10. Let us compute the pseudo cr itical points and v alues for the mea- suring function ~ ξ = ( ξ 1 , ξ 2 ) : M → R 2 , where M is the surfac e coinciding with 16 A. CERRI AND P . F ROSINI the unit spher e S 2 ⊂ R 3 , and ~ ξ is obtained as the restric tion to M of the function ~ Ξ = (Ξ 1 , Ξ 2 ) : R 3 → R 2 , with ~ Ξ( x, y, z ) = ( x, z ) (se e Figure 4). According to Definition 2 .8, it follows that a p o int Q ∈ M is pseudo cr itica l for ~ ξ if and only if either ∇ ξ 1 ( Q ) = 0 , or ∇ ξ 2 ( Q ) = 0 , or these tw o gra dient vectors are parallel with opp osite verse. Referring to o ur ex ample, ∇ ξ 1 ( Q ) a nd ∇ ξ 2 ( Q ) a re the pr o jectio ns of ∇ Ξ 1 ( Q ) = (1 , 0 , 0) and ∇ Ξ 2 ( Q ) = (0 , 0 , 1) onto the tang ent s pace of M at Q , resp ectively . Ther efore, it c an b e eas ily verified that the pseudo cr itical p oints of M for the function ~ ξ are given by the set { (co s α, 0 , s in α ) , 0 ≤ α ≤ π 2 ∨ π ≤ α ≤ 3 2 π } . Hence, the co rresp onding pseudo critical v alues are the ele ments o f the set { (cos α, sin α ) , 0 ≤ α ≤ π 2 ∨ π ≤ α ≤ 3 2 π } . P S f r a g r e p la c e m e n t s x y z Q Q ∇ Ξ 1 ( Q ) ∇ Ξ 2 ( Q ) ∇ ξ 1 ( Q ) ∇ ξ 2 ( Q ) Figure 4. ( a ) The sphere S 2 ⊆ R 3 endow ed with the measuring function ~ ξ = ( ξ 1 , ξ 2 ) : S 2 → R 2 , defined as ~ ξ ( x, y , z ) = ( x, z ) for each ( x, y, z ) ∈ S 2 . The ps eudo critical po ints of ~ ξ a re depicted in bo ld red. ( b ) The po in t Q is a ps e udo critical point for ~ ξ , since the vectors ∇ ξ 1 ( Q ) and ∇ ξ 2 ( Q ) are parallel with opp os ite verse. In the following, we shall say that ρ : R k → R h is a pr oje ction if there ex- ist h indices i 1 , . . . , i h such that ρ (( x 1 , . . . , x k )) = ( x i 1 , . . . , x i h ), for e very ~ x = ( x 1 , . . . , x k ) ∈ R k . In o ther words, suc h a function ρ is used to delete some comp o- nent s of a vector ~ x ∈ R k . W e are now ready to g ive the fir st main r e s ult of this pap er. Theorem 2.11. As s u me that ~ ϕ ∈ C 1 ( M , R k ) . L et ( ~ x, ~ y ) ∈ ∆ + b e a disc ontinuity p oint for ℓ ( M , ~ ϕ ) . Then at le ast one of the fol lowing statement s holds: ( i ) : ~ x is a disc ontinuity p oint for ℓ ( M , ~ ϕ ) ( · , ~ y ) ; ( ii ) : ~ y is a disc ontinuity p oint for ℓ ( M , ~ ϕ ) ( ~ x, · ) . Mor e over, if ( i ) holds, then a pr oje ction ρ exists such that ρ ( ~ x ) is a pseudo crit- ic al value for ρ ◦ ~ ϕ . If ( ii ) holds, then a pr oje ct ion ρ ex ists such t hat ρ ( ~ y ) is a pseudo critic al value for ρ ◦ ~ ϕ . Pr o of. Beca use of Prop osition 1.14, an admiss ible pair ( ~ l, ~ b ) exists, such that ( ~ x, ~ y ) = ( s · ~ l + ~ b, t · ~ l + ~ b ) for a suita ble pa ir ( s, t ). Statements ( i ) and ( ii ) ar e guar anteed by Theo rem 2.7, assuring that either ~ x is a discontin uity point for ℓ ( M , ~ ϕ ) ( · , ~ y ) and DISCONTINUITIES OF MUL TIDIMENSIONAL S IZE FUNCTIONS 17 s is an ( ~ l, ~ b )-pseudo critical v alue for ~ ϕ , or ~ y is a disco ntin uity p oint fo r ℓ ( M , ~ ϕ ) ( ~ x, · ) and t is a n ( ~ l , ~ b )-pseudo critical v alue for ~ ϕ , or b oth thes e conditions ho ld. Let us now confine ourselves to ass ume that ~ x is a dis contin uity p oint for ℓ ( M , ~ ϕ ) ( · , ~ y ) and s is an ( ~ l , ~ b )-pseudo critical v alue for ~ ϕ . W e shall prove that a pro jection ρ exis ts s uch that ρ ( ~ x ) is a pseudo critical v alue for ρ ◦ ~ ϕ . The pro of in the case that ~ y is a discontin uity p oint for ℓ ( M , ~ ϕ ) ( ~ x, · ) and t is an ( ~ l , ~ b )-pseudo critical v a lue for ~ ϕ pro c e eds in quite a similar wa y . Since s is an ( ~ l , ~ b )-pseudo critical v alue for ~ ϕ , b y Definition 2.1 there exist a p oint Q ∈ M and some indices i 1 , . . . , i h with 1 ≤ h ≤ k , such tha t s = F ( Q ) = ϕ i 1 ( Q ) − b i 1 l i 1 = · · · = ϕ i h ( Q ) − b i h l i h and P h j =1 λ j · ∇ ~ ϕ i j ( Q ) = 0 , with 0 ≤ λ j ≤ 1 for j = 1 , . . . , h , a nd P h j =1 λ j = 1. Let us now consider the pro jection ρ : R k → R h defined by setting ρ ( ~ x ) = ( x i 1 , . . . , x i h ). Since ( ~ x, ~ y ) = ( x 1 , . . . , x k , y 1 , . . . , y k ) = ( s · l 1 + b 1 , . . . , s · l k + b k , t · l 1 + b 1 , . . . , t · l k + b k ), we observ e that x i j = ϕ i j ( Q ) − b i j l i j · l i j + b i j = ϕ i j ( Q ), fo r ev er y j = 1 , . . . , h . T her e- fore it follows that ρ ( ~ x ) is a pseudo critical v alue for ρ ◦ ~ ϕ . R emark 2.1 2 . W e stress that Theo rem 2.11 imp rov es the result obtained in Theor em 2.7, providing a neces sary condition for discontin uities of multid imensional size functions that do es not dep end on the folia tion of the domain ∆ + . 2.1. Refining Theorem 2.11 to l ess regular measuring functions. In this section we generalize Theorem 2.1 1 to the case o f contin uous meas ur ing functions. In what follows, we shall call a sp e cial p oint for a c ont inu ous funct ion ~ ξ : M → R h any p oint Q ∈ M where ~ ξ is not C 1 . If Q is a specia l p oint fo r ~ ξ , the v alue ~ ξ ( Q ) will be called a sp e cial value for ~ ξ . Theorem 2. 13. L et ( ~ x, ~ y ) ∈ ∆ + b e a disc ontinuity p oint for ℓ ( M , ~ ϕ ) . Then at le ast one of the fol lowing statement s holds: ( i ) : ~ x is a disc ontinuity p oint for ℓ ( M , ~ ϕ ) ( · , ~ y ) ; ( ii ) : ~ y is a disc ontinuity p oint for ℓ ( M , ~ ϕ ) ( ~ x, · ) . Mor e over, if ( i ) holds, t hen a pr oje ction ρ exists such that ρ ( ~ x ) is either a sp e cial value or a pseudo critic al value for ρ ◦ ~ ϕ . If ( ii ) holds, then a pr oje ction ρ exists such t hat ρ ( ~ y ) is either a sp e cial value or a pseudo critic al value for ρ ◦ ~ ϕ . Pr o of. Beca use of Prop osition 1.14, an admiss ible pair ( ~ l, ~ b ) exists, such that ( ~ x, ~ y ) = ( s · ~ l + ~ b, t · ~ l + ~ b ) for a suitable pair ( s, t ). Statements ( i ) a nd ( ii ) a re gua ranteed by Theorem 2 .7, assuring that either ~ x is a disco ntin uity p o int fo r ℓ ( M , ~ ϕ ) ( · , ~ y ) and s is a discon tin uity p oint for ℓ ( M ,F ) ( · , t ), o r ~ y is a discontin uity point for ℓ ( M , ~ ϕ ) ( ~ x, · ) and t is a discontin uity point for ℓ ( M ,F ) ( s, · ), or b oth these conditions hold. Let us now a ssume that ~ x is a disc o ntin uity p oint for ℓ ( M , ~ ϕ ) ( · , ~ y ) and s is a discontin uity p oint fo r ℓ ( M ,F ) ( · , t ). W e sha ll pr ov e that a pr o jection ρ exists such that ρ ( ~ x ) is either a sp ecial v a lue or a ps e udo critical v alue for ρ ◦ ~ ϕ . Call S j the set of sp ecial p oints of ϕ j : M → R , for j = 1 , . . . , k . F or every i ∈ N + = N \ { 0 } and j = 1 , . . . , k , c o nsider the co mpact set K i j = { Q ∈ M : d ( Q, S j ) ≥ 1 i } , and take a C 1 function ϕ i j : M → R such that (1) max Q ∈M | ϕ j ( Q ) − ϕ i j ( Q ) | ≤ 1 i ; (2) max Q ∈ K i j k∇ ϕ j ( Q ) − ∇ ϕ i j ( Q ) k ≤ 1 i . 18 A. CERRI AND P . F ROSINI This can be do ne by considering the conv olution of each co mpo ne nt ϕ j , j = 1 , . . . , k , with a suitable “ regular izing” function. F rom now on, for the sake of co nciseness we sha ll use the s ymbols F a nd F i to denote the functions F ~ ϕ ( ~ l ~ b ) = max j =1 ,...,k n ϕ j − b j l j o and F ~ ϕ i ( ~ l ~ b ) = max j =1 ,...,k n ϕ i j − b j l j o , resp ectively . F or every i ∈ N + , we also set ~ ϕ i = ( ϕ i 1 , . . . , ϕ i k ). Since s is a discontin uit y p oint for ℓ ( M ,F ) ( · , t ), b y the Repr esentation Theorem 1.7 it follows that a cornerp oint o f ℓ ( M ,F ) (prop er or at infinit y) of co o r dinates ( s, ¯ t ) exists, with ¯ t > t . Mor e ov er, by condition (1) we hav e that the s equence ( F i ) uniformly co nverges to F . Therefore, the Ma tching Stabilit y Theorem 1.1 0 implies that a sequence (( s i , ¯ t i )) exists, suc h that ( s i , ¯ t i ) is a cor nerp oint for ℓ ( M ,F i ) and (( s i , ¯ t i )) co nv erges to ( s, ¯ t ). F or every larg e enough index i , once mo re by the Representation Theo r em 1.7, s i is then a discontin uit y p oint for ℓ ( M ,F i ) ( · , t ), a nd hence b y Theor em 2.7 we hav e that ~ x i = s i · ~ l + ~ b is a discontin uity p oint for ℓ ( M , ~ ϕ i ) ( · , ~ y ). F rom Theor em 2 .11 it follows that a pro jection ρ i exists, s uch that ρ i ( ~ x i ) is a pseudo cr itical v alue for ρ i ◦ ~ ϕ i . Possibly by considering a subseq uence, we can suppo se that all the ρ i equal a pro jection ρ . Moreov e r, we ca n consider a sequence ( Q i ) such that Q i ∈ M , ρ ◦ ~ ϕ i ( Q i ) = ρ ( ~ x i ) and Q i is a ps eudo-critical po int for ρ ◦ ~ ϕ i . F urthermore, by the compactness of M , p oss ibly by extr a cting a subsequence we can assume ( Q i ) conv erging to a p oint Q ∈ M . F rom the con tin uit y of ~ ϕ and from the uniform conv er gence of ( ~ ϕ i ) to ~ ϕ , we can deduce (3) ρ ◦ ~ ϕ ( Q ) = lim i →∞ ρ ◦ ~ ϕ ( Q i ) = lim i →∞ ρ ◦ ~ ϕ i ( Q i ) = lim i →∞ ρ ( ~ x i ) = ρ ( ~ x ). If ρ ( ~ x ) is a sp ecial v a lue for ρ ◦ ~ ϕ then our claim is prov ed. If ρ ( ~ x ) = ( x j 1 , . . . , x j h ) is not a sp ecial v a lue for ρ ◦ ~ ϕ then Q 6∈ S j 1 ∪ . . . ∪ S j h . Hence , for an y large enough index i , it follows that Q , Q i ∈ K i j 1 ∩ . . . ∩ K i j h . By recalling that each p oint Q i is a pseudo cr itical p oint for ρ ◦ ~ ϕ i , a nd by obser ving that the prop erty of being a pseudo critical p oint passes to the limit, we get that ρ ( ~ x ) is a pseudo critical v alue for ρ ◦ ~ ϕ . In other words, we hav e just proved that if ~ x is a disc o ntin uity p oint for ℓ ( M , ~ ϕ ) ( · , ~ y ), then a pro jection ρ exists such that ρ ( ~ x ) is either a sp ecial v alue or a pseudo critical v alue fo r ρ ◦ ~ ϕ . Analogously , it is p os s ible t o pro ve that if ~ y is a discon tinuit y po int for ℓ ( M , ~ ϕ ) ( ~ x, · ), then a pro jection ρ exists such that ρ ( ~ y ) is either a special v alue o r a pseudo critical v a lue for ρ ◦ ~ ϕ . 2.2. Consequences of o ur results. The results prov ed in this paper imply several relev ant co nsequences. First of all they co nt ribute to cla rifying the structure of m ultidimensional s iz e functions. In o rder to e x plain this p o int let us co nsider the case of a compact smo oth sur face S endow ed with a smo oth function ~ ϕ : S → R 2 . It is immediate to verify that all pseudo cr itica l p oints belo ng to the Ja cobi set of ~ ϕ , that is the set where the gradients ∇ ϕ 1 and ∇ ϕ 2 are par allel. This implies (cf. [20]) that in the g eneric case the pseudo cr itical po ints b elong to a 1 -submanifold J of S (in lo ca l coo rdinates such a manifold is determined by the v a nishing of the Jacobian of ~ ϕ ). Now, Theorem 2.13 allows us to claim that all discont inuit y p o in ts ( x 1 , x 2 , y 1 , y 2 ) of the size function ℓ ( M , ~ ϕ ) belo ng either to J × R 2 or to R 2 × J . F or the computation o f J we r efer to [20]. In the light of this new infor mation, w e can imag ine the pos sibility of cons tr uct- ing new algorithms to efficien tly co mpute multidimensional size functions. Let us consider the connected comp onents in which the doma in o f ℓ ( M , ~ ϕ ) is divided by DISCONTINUITIES OF MUL TIDIMENSIONAL S IZE FUNCTIONS 19 the se t ( J × R 2 ) ∪ ( R 2 × J ). Since size functions are lo cally co nstant at each po int of contin uity (w e r ecall that they are natural-v alued), we immediately obtain that ℓ ( M , ~ ϕ ) is constant at each o f those connected comp onents. It follows that the computation of ℓ ( M , ~ ϕ ) just requir e s the computation of its v a lue at only one p o int for each connected co mp one nt. Thes e obse r v ations op en the wa y to new and more efficient metho ds of co mputatio n for multidimensional size functions. Our results also make new pseudo dista nces betw e e n size functions computable in a n easier wa y . Indeed, let us consider tw o size pa irs ( M , ~ ϕ ), ( N , ~ ψ ) and the v a lue δ H giving the Ha us dorff distance b etw een the sets where ℓ ( M , ~ ϕ ) and ℓ ( N , ~ ψ ) are discontin uous. It is trivia l to c heck that the function d D defined by setting d D ℓ ( M , ~ ϕ ) , ℓ ( N , ~ ψ ) = δ H is a pseudo distance b etw een multidimensional size func- tions. Helping us to lo calize the discontin uities of multidimensional size functions , Theorem 2.13 makes the computation of d D easier. Conclusions and future work In this pap er we have prov ed that a dis contin uity p oint for a multidimensional size function has at least one sp ecia l or pseudo cr itical co ordina te, under the hy- po thesis that the considered measur ing function is (at least) contin uous. This result is a first step in the developmen t of Size Theory for R k -v alued measuring functions. Indeed, the localiza tion of the unique po ints whe r e k -dimens io nal size functions can be discontin uous a llows us to b etter understand T op ologica l Persistence and op ens the way to the form ulation of effective algor ithms for its computation. O n the other hand, it is worth noting that our framework could b e applicable also to the study of discontin uities in p ersistent algebra ic top olo gy , including p ersistent homolog y groups and size homo to py gr oups. How ever, some difficulties could derive from the present la ck of the analogue o f Theorem 1.10 for those structur es, i.e. a stabil- it y result in the case of c ontinuous (p ossibly non-tame [10]) measuring functions. These last r esearch lines app ear to be promising, b o th from the theo retical and the applicative p oint of view . Ac knowledgemen ts. W ork p erfo r med within the activit y of AR CES “E. De Cas- tro”, Universit y o f Bologna, under the auspices of INdAM-GNSA GA. The authors thank Davide Guidett i (Univ ersity of Bolo gna) fo r his helpful advice. This pap er is dedicated to Martina and Riccardo. A. Appendix A.1. Relations hip b et ween Si ze Theory and Persisten t Ho mology. Size Theory and Persistent Homology are deeply connected theor ies. W e shall rec a ll some s imila rities a nd differ ences b etw een them in this app endix. F or mor e details we r e fer to the sur vey pap ers [3] and [2 1]. Size Theory was b orn at the b eginning on the 19 90s (cf. [2 3, 2 4]) as a math- ematical appro a ch to sha pe c omparison. The main idea is to describ e shap e a s a pseudo metric (the natu ra l pseudo distanc e ) b etw een top olog ical spaces endow ed with real-v alued functions, ca lled me asuring functions . The measuring functions are used a s descr iptors o f the pro p erties with re sp e ct to which the top olog ical spaces are compar ed. F or example, if we a re interested in the compa rison of tw o ob jects A and B with r e sp e ct to their bumps a nd hollows, it can b e natural to c onsider t wo subsets of R 3 representing their bo dies, endowed with tw o functions asso ciating 20 A. CERRI AND P . F ROSINI with each p oint its dis ta nce from the ce nter of mas s of the b o dy it b elongs to. On the o ther hand, if w e are interested in the colorings of A and B , we can co nsider tw o surfaces endowed with functions r epresenting the colo r taken at each point. The natural pseudo distance b etw een tw o pa ir s (t op olo gic al sp ac e, me asuring function) , called size p airs , is the infimum of the change of the measuring function under the action o f all pos sible homeo mo rphisms from one top olo gical space to the other. Size functions and size homo to py groups (their algebraic-to p o logical equiv alent; cf. [28]) app eared as mathematical to ols useful for computing low er bo unds for the natural pseudo distance, introducing ante litter am the study of T op olo gical Persistence. Persisten t Homolog y was b orn appr oximately ten years la ter , a t the b e g inning of the 00s , as a mathematica l a pproach to studying the homo logy of top ologica l spaces known just by a s a mpling. In this case, the attention w as fo cused on the radius r of the spheres centered a t the sample p oints, whose unio n approximates the top o logical space. The problem of choo sing the v alue of r led to the concept of p ersis tence, emphasizing the top olog ical prop er ties stable under the change of r . In other words, the main goal was topolog ical simplification, in order to g et the relev ant top ologic a l info r mation concerning the o b ject under study . The v alue r , playing the role of the meas ur ing function in Size Theory , has b een s ubsequently extended to mor e genera l functions. Despite their different orig ins and goals, Size Theo ry and Persistent Homology hav e develop ed similar s tructures and concepts, under differen t names. In order to help r eaders who a re not fa milia r with both these theor ie s, this section compares some of their key concepts, explaining their recipro ca l links. These connections and relationships are s ummarized in T able 1. As we hav e alr eady said previously , the ob jects under study in Size Theor y are the pairs (top olo gic al sp ac e, me asuring funct ion) , ca lled size pa irs. The main results o f this pap er, stated in Theor e m 2.11 and Theore m 2.13, are giv en under the assumption that the top olog ic a l spac e is a closed C 1 Riemannian manifold, while the measuring function is supp ose d to b e at lea st contin uo us. In Persistent Homolo gy the ob ject o f study is usually a simplicial complex K , endow ed with a filtration, i.e. a nested sequence of sub complexes that starts with the empty complex and ends with the complete co mplex K . The filtration is usually obtaine d by a rea l-v alued function defined at the vertices of K a nd extended to the simplexes . E ach lev el K c in the filtratio n is obtained by taking just the simplexes having vertexes at whic h the function ta kes a v alue les s than (or equal to) a parametrica l v alue c . As a matter of fac t, Size Theory is more fo cused on co ntin uous data (top ologica l spaces or manifolds, endow e d with contin uous or C k functions), while Persistent Homology usually studies discre te structures (simplicial complexes endow ed with piecewise linear functions) or structures satisfying some finiteness h yp otheses (topo- logical spaces endo wed with tame functions). As a consequence, the re sults obtained in the tw o theories are often expre s sed and prov ed in similar but different mathe- matical s e ttings . F or ex ample, while the fa c t that the p ersistent ho mo logy gr oups are finitely g enerated is just a trivial co nsequence of the assumed hypotheses, the finiteness of size functions r equires a (simple but not trivial) pro of. Analogo usly , while the localiza tion of discontin uities for the rank of the 0- th p ersistent homology group (i.e. the 0-th rank inv ariant) is usually trivia l in the 1-dimensiona l setting, this do es not hold for the discontin uities of a s iz e function. This is a ctually what happ ens in this pap er, wher e the measuring functions are no t requir ed to b e tame DISCONTINUITIES OF MUL TIDIMENSIONAL S IZE FUNCTIONS 21 Size Theory references P ersi sten t H omology references size p air [23, 25] filtr ation [10, 22] of a c omplex natur al pseudo distanc e [16, 18] b etwe en size p airs me asuring [23, 25] filtr ating [21, 22] function function (multidimensional) [2, 23, 24] 0 th r ank invariant [7] size function size homotopy gr oup [28] size functor [5] p ersistent [2 1, 22] k -th homolo gy gr oup multiplicity [27, 31] multiplicity of p oints [21, 22] of c ornerp oints in p ersistenc e diagr ams formal series of c ornerp oints [27, 31] p ersistenc e diagr ams [21, 22] and c ornerlines multidimensional [2, 28] multidimensional [6, 7] Size The ory Persistent Homolo gy T able 1. Approximative co rresp ondence b etw e e n some concepts in Size Theory and Persistent Homology . F or each c o ncept bibli- ographic refer e nces ar e r ep orted. A line deno tes a missing cor r e- sp ondence. (cf. [10] for a for ma l definition of tame function). O bviously , this c r eates many techn ical difficulties, even in the case of C 1 measuring functions, since they are allow ed to hav e an infinite num b er of critical v a lues. This kind of problem do es not usually app ear in literature reg arding Persistent Homology . Size functions are the most usual too l in Size Theory , while p ersis ten t homo logy groups constitute the main ob ject of re s earch in Persistent Homology . Size func- tions are simply the rank of p ersistent 0-homo logy gr oups. On the other ha nd, the relations hip b etw een p ersistent homology gr o ups (in tro duced in [22]) and size homotopy groups (introduced in [28]) is the sa me that links homology groups and homotopy gr oups. F or exa mple, the fir s t pers is ten t homolog y group is the Abe lia n- ization of the fir st size ho motopy gr oup. Both size functions and per sistent homolo gy gro ups ar e often represented by sets of po int s with m ultiplicities. The repres ent ation for size functions is called formal series of c ornerp oints (pr op er and at infin ity) a nd was intro duced in [31]. The corres p o nden t repr esentation for p ers is tent homology gr oups is named p ersistenc e diagr am a nd was introduced in [22]. The formulas defining the multiplicities o f the co nsidered p oints a re quite ana logous. Howev er, bec a use of the hypothes e s usually ass umed in P ersistent Homology , p ersis tence diagra ms are finite collections of p oints, while the formal series used in Size Theory ca n contain an infinite num b er of cornerp o in ts. The k -T riangle Lemma in [22] is ess e n tially equiv alent to the 22 A. CERRI AND P . F ROSINI Representation Theor em recalled in this pap er a nd pr ov ed in [2 7] (under slightly different hypothes e s). F ormal series r epresenting size functions and p ersis tence dia grams repres e nting the ranks o f per sistent homolog y gro ups ca n be compar ed by using s ome matc hing distances (cf. [27, 3 1] for size functions a nd [1 0] for p ersis tence diag r ams). The matching distance used in this pap er has been s tudied in [1 1, 1 3] for size functions and in [10] for p ersistent homology groups . The s tudy of multidimensional measur ing functions has started in [28] for Size Theory and in [7 ] for Persistent Homo logy . References [1] M.S. Bazaraa, H.D. Sherali, C.M. Shett y , Nonline ar pr o gr amming: the ory and algorithms , J. Wiley and Sons, New Y ork, 1993. [2] S. Biasotti, A. Cerri, P . F rosini, D. Giorgi, C. Landi, Multidimensional size funct ions for sha p e c omp arison , Journal of Mathemat i cal Imaging and Vision, 32 (2008), 161–179. [3] S. Biasotti, L. De Floriani, B. F alcidieno, P . F rosini, D. Gior gi , C. Landi, L. Papaleo, M. Spa- gn uolo, D escribing shap e s by ge ometric al-top olo gic al pr op ertie s of r ea l functi ons , ACM Comput- ing Survey s, 40 (4) (2008), 12:1–12:87. [4] S. Biasotti, D. Giorgi, M. Spagn uolo, B. F alcidieno, Size functions for co mp aring 3D mo dels , Pa ttern Recognition 41 (9) (2008), 2855–2873. [5] F. Cagliari, M. F erri, P . P ozzi, Size functions fr om a c ate goric al viewp oint , Acta Applicandae Mathematicae, 67 (2001), 225–235. [6] G. Carlsson, T op olo gy and data , Bulletin of the American Mathematica l So ciety , 46 (2) (2009), 255–308. [7] G. Carlsson, A. Zomoro dian, The the ory of multidimensional p ersiste nc e homolo gy , Discrete and Computational Geometry , 42 (1) (2009), 71–93. [8] A. Cerri , M. F erri, D. Giorgi, R et rieval of t ra demark images by me ans of size funct i ons , Graphical Mo dels 68 (2006) , 451–471. [9] F. H. Clarke, Optimization and nonsmooth analysis, Classics in Applied Mathematics 5 , So- ciet y f or Industrial and Applied Mathematics (SIAM), Philadelphia, P A, 1990. [10] D. Cohen-Steiner, H. Edelsbrunner, J. Harer, Stability of p ersi st enc e diagr ams , Discrete and Computational Geometry , 37 (1) (2007), 103–120. [11] M. d’Amico, Asp etti c omputazionali del le F unzioni di T aglia (Italian), PhD thesis, Univ ersit` a di P ado v a, Italy , 2002 . [12] M. d’Am ico, P . F rosini, C. Landi, Using matching distanc e in Size The ory: a survey , In ter- national Journal of Imaging Systems and T ec hnology , 16 (5) (2006 ), 154–161. [13] M. d’Amico, P . F rosi ni , C. Landi, Natur al pseudo-distanc e and optimal matching b e- twe en r e duc e d size functions , A cta Applicandae Mathematicae, (to appear), a v ailable at h ttp://www.springerlink.com/con ten t/cj84327h4n280144/fulltext.pdf . [14] B. Di F abio, C. Landi, ˇ C e ch homolo gy for shap e r e c o gnition in the pr esenc e of o cclu sions , arXiv:0807.0796 (2008) . [15] F. Di bos, P . F rosini, D. Pasquignon, The use of Size F unctions for Comp arison of Shap es thr ough Diff er ential Invariants , Journal of Mathematical Imaging an d Vision, 21 (2) (2 004), 107– 118. [16] P . Donatini, P . F rosini, Natur al pseudo distanc es b etwe en close d manifolds , F orum Mathe- maticum, 16(5) (2004) , 695–715 . [17] P . Donatini, P . F rosini, L ower bo unds for natur al pseudo distanc es via size functions , Arc hives of Inequalities and Applications, 1 (2) (2004), 1–12. [18] P . Donatini, P . F rosini, Natur al pseudo distanc es b etwe en close d surfac es, Journal of the Eu- r op e an Mathematic al So ciety , 9 (2) (2007), 231–253. [19] P . Donatini, P . F rosini, Natur al pseudo distanc es b etwe en close d curves , F orum Mathe- maticum, (to appear). [20] H. Edelsbr unner, J. Harer, Jac obi sets of multiple Morse functions , In F. Cuc ker, R. DeV ore, P . Olver, and E. Sueli, editors, F oundations of Computationa l M athematics, 37-57, England, 2002. Cam bridge Universit y Press. DISCONTINUITIES OF MUL TIDIMENSIONAL S IZE FUNCTIONS 23 [21] H. Edelsbr unner, J. Harer. Persist ent homolo gy — a survey , Con temporary Mathematics, 453 (2008) , 257–282. [22] H. Edelsbr unner, D. Letsche r, A. Zomorodian, T op olo gic al Persiste nce and Simplific ation , Discrete Comput. Geom. 28 (2002), 511-533. [23] P . F rosini, A distanc e for similarity classes of submanifolds of a Euclide an sp ac e , Bulletin of the Australian Mathematical Soci ety , 42 (3) (1990), 407–416. [24] P . F rosini , Me asuring shap es by size functions , Pro c. of SPIE, Int elligent Rob ots and Com- puter Vision X: Algorithms and T ec hniques, Boston, MA 1607 (1991), 122–133. [25] P . F rosini, Conne ct ions b et we en size functions and c ritic al p oints , Mathematical Methods In The Applied Sciences, 19 (1996), 555–569. [26] P . F rosini, C. Landi, Size funct ions and morpho lo gic al t r ansformations , Acta Appli candae Mathematicae, 49 (1997), 85–104. [27] P . F rosini, C. Landi, Size functions and formal serie s , Appl. Algebra Engrg. Comm. Comput., 12 (2001), 327–349. [28] P . F r osini, M . Mulazzani, Size homotopy gr oups for c omputation of natur al size distanc es , Bull. Belg. Math. Soc. 6 (199 9), 455–464. [29] R. Ghrist, Bar c o des: the p ersistent top olo gy of data , Bull . A m er. Math. Soc., 4 5 (1) (2008), 61–75. [30] M. Hirs h, Different ial top ology , Graduate T exts i n M athematics 33 , Springer-V erlag, New Y ork, 1976. [31] C. Landi, P . F rosini, New pseudo distanc es for the size function sp ac e , Pr oc. SPIE V ol. 3168, p. 52– 60, Vision Geo metry VI, Robert A. Melter, Angela Y. W u, Longin J. Latec ki (eds.), 1997. [32] J. Mil nor, Morse Thory , Princeton Univ ersity Press, NJ, 1963. [33] S. Smale, Optimizing Seve r al F unctions , Manifolds–T okyo 196 3 , Pr oc. of Int ernational Con- ference on Manifolds and Related T opics in T opology , Universit y T okyo Press, T okyo (1975), 69–75. [34] C. Uras, A. V erri, Com puting size functions fr om ed ges map , In tern. J. Comput . Vision 23 (2) (1997), 169–183. [35] A. V erri, C. Uras, Metric-top olo g ic al ap pr o ach to shap e r epr esentation and r e c o gniti on , Image Vision Comput. 14 (1996), 189–207. [36] A. V erri, C. Uras, P . F rosi ni , M. F erri, On the use of size functions for shap e analysis , Bi ol. Cybern. 70 (1993), 99–10 7. Andrea Cerri, ARCES, Universit ` a di Bologna, via Toff ano 2 / 2 , I- 40135 Bologna, It alia Dip ar timento di Ma tema tica, Universit ` a di Bologna, P.zza di Por t a S. Dona to 5, I- 401 26 Bologna, It a lia E-mail addr ess : cerri@dm. unibo.it P a trizio Fro sini (corresponding author), AR CES, Universit ` a d i Bologna, via Toff a no 2 / 2 , I- 40135 Bologna, It alia Dip ar timento di Ma tema tica, Universit ` a di Bologna, P.zza di Por t a S. Dona to 5, I- 401 26 Bologna, It a lia, tel. +3 9-051-209 4478, f ax. +39-0 51-20944 90 E-mail addr ess : frosini@d m.unibo.i t
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment