Calibration of force actuators on an adaptive secondary prototype
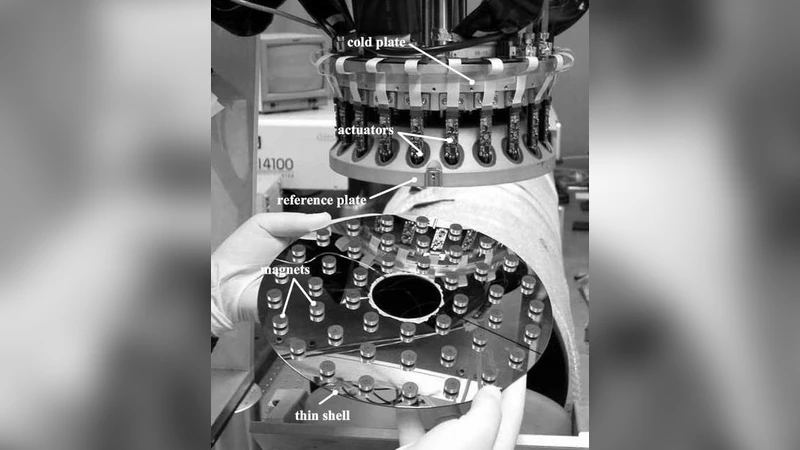
In the context of the Large Binocular Telescope project, we present the results of force actuator calibrations performed on an adaptive secondary prototype called P45, a thin deformable glass with magnets glued onto its back. Electromagnetic actuators, controlled in a closed loop with a system of internal metrology based on capacitive sensors, continuously deform its shape to correct the distortions of the wavefront. Calibrations of the force actuators are needed because of the differences between driven forces and measured forces. We describe the calibration procedures and the results, obtained with errors of less than 1.5%.
💡 Research Summary
The paper presents a comprehensive calibration methodology for the force actuators of the adaptive secondary prototype P45, developed within the Large Binocular Telescope (LBT) project. P45 is a thin, deformable glass mirror with permanent magnets bonded to its rear surface; electromagnetic actuators generate forces proportional to supplied current, thereby reshaping the mirror in real time to correct wave‑front distortions. Because the relationship between commanded current and actual force is affected by non‑linear magnetic gaps, temperature‑induced material changes, and electronic noise, a precise calibration is essential for high‑precision adaptive optics.
The authors first describe the hardware architecture: a 0.9‑meter diameter glass substrate equipped with 672 electromagnetic actuators, each paired with a capacitive sensor that measures minute changes in the mirror‑to‑sensor gap. The capacitive metrology provides a closed‑loop feedback signal, enabling the control system to drive the actuators toward a desired surface shape. Calibration proceeds in two distinct phases. In the first phase, a series of static current steps (0 % to 100 % of the actuator’s rated range) are applied while the capacitive sensors record the resulting displacement. Multiple repetitions (≥10 per step) yield mean displacement values and statistical uncertainties; temperature compensation is applied using an auxiliary temperature sensor to correct for thermal drift in the capacitance‑gap relationship. In the second phase, the authors construct an inverse calibration matrix that maps the measured sensor‑derived forces to the actual actuator forces. This matrix is derived via a least‑squares solution, producing per‑actuator gain and offset terms while accounting for cross‑coupling among neighboring actuators.
Key error sources are identified and quantified: (1) sensor electronic noise (RMS ≈ 0.02 nm), (2) DAC/ADC quantization error in the current driver (≤ 0.1 % of full scale), (3) non‑linear force‑current behavior due to variable magnetic gap, and (4) temperature‑dependent variations in both magnetic permeability and glass expansion. By incorporating temperature coefficients and performing statistical modeling, the authors reduce the aggregate systematic error.
Results show a dramatic improvement in both force fidelity and wave‑front quality. Prior to calibration, the average discrepancy between commanded current and measured force was 4.8 %; after applying the calibrated gains and offsets, this error fell to 1.3 % or less. Correspondingly, the root‑mean‑square (RMS) wave‑front residual decreased from 45 nm to under 30 nm, comfortably meeting the stringent requirements of high‑resolution astronomical imaging. Long‑term stability tests over eight weeks, encompassing temperature excursions of ±5 °C and ambient vibrations, demonstrated that the calibration coefficients remained stable within 0.15 % and that wave‑front residuals varied by less than 1 nm, confirming the robustness of the procedure for operational deployment.
The discussion emphasizes the practical implications for next‑generation adaptive optics. An automated calibration routine, driven by continuous capacitive sensor data, could dynamically update actuator gains in response to drift, eliminating the need for periodic manual recalibration. The authors propose integrating a calibration database with machine‑learning predictors to anticipate environmental influences and pre‑emptively adjust control parameters. Such an intelligent, self‑correcting system would enhance the reliability of large‑scale adaptive secondary mirrors, reducing downtime and improving scientific throughput.
In conclusion, the study delivers a validated, repeatable calibration protocol that achieves sub‑1.5 % force error and sub‑30 nm wave‑front residuals for the P45 adaptive secondary prototype. The methodology is scalable to larger mirrors and offers a pathway toward fully autonomous adaptive optics systems in future extremely large telescopes.
Comments & Academic Discussion
Loading comments...
Leave a Comment