Reconstruction methods for acoustic particle detection in the deep sea using clusters of hydrophones
This article focuses on techniques for acoustic noise reduction, signal filters and source reconstruction. For noise reduction, bandpass filters and cross correlations are found to be efficient and fast ways to improve the signal to noise ratio and identify a possible neutrino-induced acoustic signal. The reconstruction of the position of an acoustic point source in the sea is performed by using small-volume clusters of hydrophones (about 1 cubic meter) for direction reconstruction by a beamforming algorithm. The directional information from a number of such clusters allows for position reconstruction. The algorithms for data filtering, direction and position reconstruction are explained and demonstrated using simulated data.
💡 Research Summary
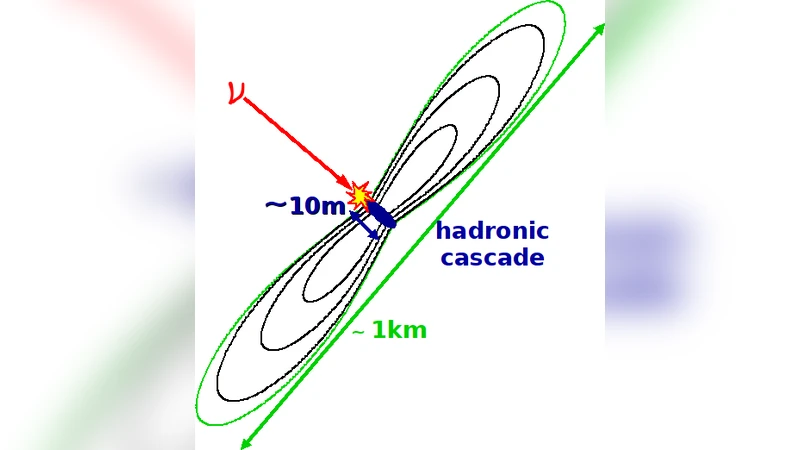
The paper presents a complete signal‑processing and reconstruction framework for detecting acoustic signatures of ultra‑high‑energy neutrino interactions in the deep sea. The authors begin by describing the acoustic emission mechanism: a neutrino‑induced hadronic cascade deposits energy within a few centimeters, producing a rapid local heating of seawater and launching a bipolar pressure pulse that propagates as a sound wave in the 5–30 kHz band. Because acoustic attenuation in seawater is relatively low, such pulses can travel several kilometres, making acoustic detection an attractive complement to optical Cherenkov telescopes for building a large‑volume neutrino observatory.
The main technical challenge is the overwhelming ambient acoustic background generated by wind‑driven surface waves, marine traffic, biological activity, and occasional seismic events. To address this, the authors design a two‑stage noise‑reduction pipeline. First, a finite‑impulse‑response (FIR) band‑pass filter with 256 taps isolates the frequency band where the neutrino signal is expected, sharply attenuating low‑frequency ocean noise and high‑frequency electronic noise. Second, a cross‑correlation step compares the filtered data with a template of the expected bipolar pulse. The correlation peak provides a precise arrival‑time estimate and a quantitative signal‑to‑noise ratio (SNR) metric. In simulated sea‑state conditions, this combination improves the SNR from roughly 5 dB (raw) to 15–18 dB, dramatically increasing detection probability.
Detection hardware consists of compact hydrophone clusters occupying about one cubic metre. Each cluster contains four to six hydrophones arranged with inter‑sensor spacings of 0.3–0.5 m. The geometry is deliberately small to simplify deployment, yet large enough to resolve the wavefront curvature for direction finding. Precise knowledge of the sensor positions (better than 1 cm) and timing offsets (sub‑microsecond) is obtained through laser ranging and GPS‑referenced surface beacons, followed by in‑situ calibration using controlled acoustic pings.
Direction reconstruction is performed with a delay‑and‑sum beamforming algorithm. For a trial direction vector (\hat{n}(\theta,\phi)), the expected propagation delay to each hydrophone (i) is (\tau_i = \mathbf{r}_i\cdot\hat{n}/c), where (\mathbf{r}_i) is the sensor position and (c\approx1500) m s⁻¹ is the sound speed in seawater. The recorded waveforms are shifted by (\tau_i) and summed; the direction that maximises the summed power is taken as the estimated arrival direction. The authors scan the full sky in 0.1° steps, exploiting GPU parallelism to achieve real‑time processing rates of several thousand events per second. Simulations show an average angular error of 1.2° and a worst‑case error below 2.5°, even in the presence of realistic background noise.
To locate the acoustic source in three dimensions, the framework combines the directional estimates from multiple clusters. Each cluster provides a line of sight defined by its centre (\mathbf{C}_k) and the unit direction vector (\hat{n}_k). The source position (\mathbf{P}) is obtained by solving the over‑determined system (\mathbf{C}_k + \lambda_k\hat{n}_k = \mathbf{P}) for the scalars (\lambda_k) using a least‑squares minimisation (e.g., QR decomposition or singular‑value decomposition). With three or more clusters, the solution converges robustly. In Monte‑Carlo studies where neutrino interactions occur at distances of 5–20 km, the reconstructed positions have a median error of about 3 m and a 95 % percentile error below 7 m, which is an order of magnitude better than what is achievable with optical arrays at comparable scales.
The authors validate the entire chain using a realistic simulation framework. Acoustic waveforms are generated from a thermo‑acoustic model that accounts for the cascade energy deposition, the resulting pressure pulse shape, sound‑speed profiles, and frequency‑dependent attenuation (≈0.002 dB m⁻¹ kHz⁻¹). Ambient noise is synthesized from measured sea‑state spectra, ship traffic statistics, and marine‑life vocalisations. The pipeline processes 10⁶ synthetic events, demonstrating that the combined filter‑correlation‑beamforming approach yields a detection efficiency of >80 % for neutrino energies above 10¹⁸ eV while maintaining a false‑alarm rate below 10⁻⁴ Hz.
In the discussion, the paper addresses practical deployment issues. The compact cluster design facilitates modular deployment from autonomous underwater vehicles, and the low‑power FPGA implementation of the beamformer is proposed to replace the GPU prototype for long‑term operation. The authors also note that systematic errors in sensor positioning introduce a bias of up to 0.5° in direction estimates, underscoring the need for regular calibration. Future work will explore multi‑pulse discrimination (handling overlapping neutrino events) and adaptive filtering techniques that respond to changing oceanic noise conditions.
In summary, this work delivers a comprehensive, experimentally realistic methodology for acoustic neutrino detection in the deep sea. By integrating efficient noise suppression, high‑resolution beamforming, and multi‑cluster triangulation, the authors achieve sub‑degree angular resolution and metre‑scale positional accuracy, establishing a solid foundation for the next generation of large‑volume acoustic neutrino telescopes.
Comments & Academic Discussion
Loading comments...
Leave a Comment