Learning for Dynamic subsumption
In this paper a new dynamic subsumption technique for Boolean CNF formulae is proposed. It exploits simple and sufficient conditions to detect during conflict analysis, clauses from the original formula that can be reduced by subsumption. During the …
Authors: - 저자 정보가 논문 본문에 명시되어 있지 않음. (제공된 텍스트에 저자명 및 소속이 포함되지 않음)
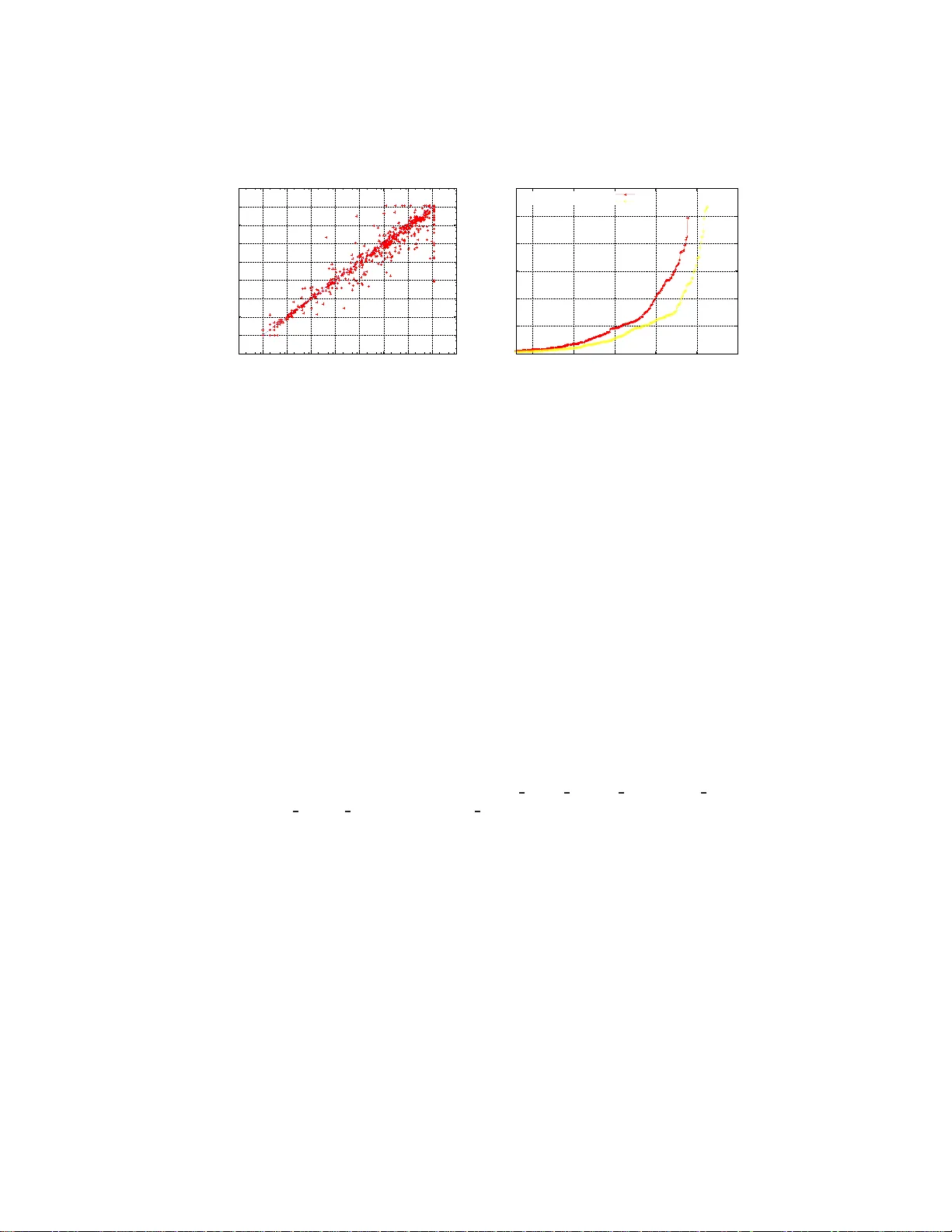
Learning for Dynamic Subsu mption Y. Hamadi 1 , S. Jabb our 2 , and L. Sa ¨ ıs 2 1 Microsof t Research 7 J J Thomson Avenue Cam bridge, United Kingdom youssefh@micr osoft.com 2 Universit ´ e Li lle-Nord de F rance CRIL - CNRS UMR 8188 Artois, F-62307 Lens { jabbour,sais } @cril .fr Abstract. This pap er presents an original d ynamic sub sumption tech- nique for Bo olean CNF formulae. It exploits simple and sufficient condi- tions to detect, during conflict analysis, clauses from the fo rmula that can b e reduced by subsump t ion. During the learnt clause d eriva tion, and at eac h step of the associated resolution pro cess, chec ks for backw ard sub- sumption b etw een the current resolv en t and clauses from the original form ula are efficien tly performed. T he resulting metho d allo ws the dy- namic remo v al of literals from the original clauses. Exp erimental results sho w that the integration of our dynamic subsumption technique within the state-of-the-art SA T solv ers Minisat and Rsat particularly b enefits to crafted problems. 1 In tro duction The SA T pro ble m, i.e., the pro blem of c hec king whether a set of Boolea n clauses is sa tisfiable or not, is central to ma ny do ma ins in c omputer s cience and ar- tificial intelligence including constraint satisfa ction pr o blems (CSP), planning, non-monotonic rea soning, VLSI correctness chec king, etc. T o day , SA T has gained a consider able audience with the a dven t of a ne w ge ne r ation of SA T solvers able to solve larg e instances enco ding rea l-world applications a nd the demonstra- tion that these solvers r epresent imp o rtant low-lev el building blocks for ma ny impo rtant fields, e.g., SMT s o lving, Theorem proving, Mo del finding, Q BF solv- ing, etc. These solvers, called mo dern SA T solvers [13 , 9], a re based on cla ssical unit propa gation [6] efficiently combined thr ough incremental data str uctures with: (i) res ta rt po lic ies [10, 11], (ii) activity-based v ariable selection heuristics (VSIDS-lik e) [13], and (iii) clause learning [1, 12, 13]. Mo dern SA T solvers can be seen as an extended version of the well known DPLL- like pro cedure obtained thanks to these different enhancements. It is imp or tant to note tha t the w ell known reso lution rule ` a la Robinson still pla ys a stro ng role in the efficienc y of mo dern SA T solvers which ca n b e understo o d as a particular for m of general resolution [2]. Indeed, conflict-based learning, o ne of th e most important c o mpo nent of SA T solvers is bas e d on r esolution. W e ca n als o mention, that the well known and hig hly successful ( SatElite ) prepro cess or is bas e d on v ariable elimination through the r esolution r ule [15 , 3]. As mentioned in [15], on industrial instances, resolution leads to the generation of many tauto lo gical resolven ts. This ca n b e explained by the fact that many clauses represent Bo ole a n functions e nco ded through a common set o f v ariables. This pro pe r ty o f the enco dings might also be at the origin of many redundant or subsumed clauses at different steps of the search pr o cess. The utilit y of ( SatElite ) on industr ial problems ha s been prov ed, and therefore one ca n wonder if the a pplica tion o f the res o lution rule could b e p er- formed no t o nly a s a pre-pro c essing stag e but systematically during the s earch pro cess. Unfortunately , dynamically maintaining a formula clo s ed under s ub- sumption migh t b e time cons uming . An attempt has been made recen tly in this direction b y L. Zhang [1 6]. In this work, a novel algor ithm maintains a subsumption-free cla use database b y dynamically detecting a nd removing sub- sumed clauses as they ar e added. Int erestingly , the a uthor ment ion the following per sp ective o f resear ch: ” How to balance the runtime cost and the qualit y of the result fo r on-the-fly CNF simplification is a very interesting problem worth m uch further in v estigation”. In this pap er, our ob jective is to design an e ffectiv e dynamic simplification a l- gorithm based on reso lution. Our pr o p osed a pproach aims at eliminating liter a ls from the CNF formula by dynamically substituting s maller claus es. More pre- cisely , o ur approach exploits the intermediate steps of cla ssical conflict ana lysis to subsume the clauses of the formula whic h ar e used in the under lying r esolution deriv a tion of the ass erting clause. Since orig inal clauses or learnt clauses ca n b e used dur ing conflict analysis b oth categorie s ca n b e s implified. The effectiveness of our technique lies in the efficie ncy o f the subsumption test, which is bas ed on a simple and s ufficient condition computable in constant time. Mo reov er, since our technique relies o n the der iv ation of a co nflict- c lause, it is guided b y the co n- flicts, and simplifies parts of the formula identified as imp ortant b y the sea rch strategy (VSIDS guida nce). This dynamic pro cess preserves the s a tisfiability of the fo r mula, a nd with some a dditional b o okkeeping c an preserve the eq uiv alence of the mo dels. The pape r is org anized as follows. After some preliminar y definitions and no- tations, classic al implica tio n gra ph and learning schemes a re presented in s ection 2. Then our dyna mic subsumption a pproach is desc rib ed in section 3. Finally , befo re the conclusion, exp erimental res ults demonstrating the p erformances of our approach are pr esented. 2 T ec hnica l bac kgr ound 2.1 Preliminary definiti ons and notations A CNF formula F is a conjunction of clauses , where a c lause is a disjunction of liter al s . A literal is a po sitive ( x ) o r negated ( ¬ x ) prop ositiona l v ariable. The t wo literals x and ¬ x a re called c omplementary . W e note by ¯ l the complementary literal of l . F or a s et of liter als L , ¯ L is defined a s { ¯ l | l ∈ L } . A unit c la use is a clause containing only o ne literal (called unit liter al ), while a binary clause contains exactly tw o literals. An empty clause , noted ⊥ , is interpreted as fals e (unsatisfiable), wherea s an empty CNF formula , noted ⊤ , is interpreted as true (satisfiable). The set of v ar iables o ccurring in F is noted V F . A set of litera ls is c omplete if it con tains one literal for each v a riable in V F , and fun damental if it do es not co n tain complementary litera ls. An assignment ρ of a Bo o le an formula F is function which asso cia tes a v a lue ρ ( x ) ∈ { f al se, true } to so me of the v ariables x ∈ F . ρ is c omple te if it assig ns a v alue to e very x ∈ F , and p artial otherwise. An assignment is alternatively represented by a complete and fundamental set of litera ls, in the ob vious wa y . A mo de l of a formula F is an assignment ρ that makes the formula tr ue ; noted ρ Σ . The following no tations will b e heavily used throughout the pap er: – η [ x, c i , c j ] denotes the r esolv ent b etw een a cla use c i containing the liter a l x and c j a clause c ontaining the opp osite litera l ¬ x . In other words η [ x, c i , c j ] = c i ∪ c j \{ x, ¬ x } . A resolven t is calle d taut olo gic al when it contains opp osite literals. – F | x will denote the fo r mula obtaine d from F by assigning x the truth- v alue true . F ormally F | x = { c | c ∈ F , { x, ¬ x } ∩ c = ∅} ∪ { c \ { ¬ x } | c ∈ F , ¬ x ∈ c } (that is: the cla uses co ntaining x and ar e therefor e satisfied are remov ed; and tho s e co nt aining ¬ x a r e s implified). This notation is ex- tended to assignments: given an ass ignment ρ = { x 1 , . . . , x n } , w e define F | ρ = ( . . . (( F | x 1 ) | x 2 ) . . . | x n ). – F ∗ denotes the formula F c lo sed under unit propa g ation, defined recurs ively as follows: (1) F ∗ = F if F do es no t contain any unit cla use, (2) F ∗ = ⊥ if F contains tw o unit-cla uses { x } and {¬ x } , (3) otherwis e, F ∗ = ( F | x ) ∗ where x is the litera l app earing in a unit clause of F . A c lause c is deduced by unit propaga tion from F , no ted F | = ∗ c , if ( F | ¯ c ) ∗ = ⊥ . Let c 1 and c 2 be t w o claus es of a formula F . W e say that c 1 (resp ectively c 2 ) subsume (resp ectively is subsumed) c 2 (resp ectively by c 1 ) iff c 1 ⊆ c 2 . If c 1 subsume c 2 , then c 1 | = c 2 (the conv erse is no t true). Also F and F − c 2 are equiv alent with res p ect to sa tisfiability . 2.2 DPLL searc h DPLL [6] is a tree- ba sed backtrack search pro cedure; at each no de of the se a rch tree, the assigned literals (decision literal and the pro pagated ones) a r e lab eled with the same de cision level starting from 1 and increased at each decisio n (or branching). After backtrac king, so me v ar iables ar e unassigned, and the c urrent decision level is dec r eased a ccordingly . A t level i , the current par tial ass ign- men t ρ ca n b e repres ent ed as a seq uence of decision-pro pagation of the form h ( x i k ) , x i k 1 , x i k 2 , . . . , x i k n k i where the first literal x i k corres p o nds to the decisio n literal x k assigned at level i and each x i k j for 1 ≤ j ≤ n k represents a propa g ated (unit) litera ls a t level i . L e t x ∈ ρ , we note l ( x ) the a ssignment level of x . F o r a clause α , l ( α ) is defined as the maximum level of its assigned litera ls. 2.3 Conflict analysis using im plication graphs Implication graphs is a standard representation conv enien tly used to analyze conflicts in mo dern SA T solvers. Whenever a literal y is propag ated, we keep a r eference to the clause which triggers the propag ation of y , which w e note imp ( y ). The clause imp ( y ), ca lled implication of y , is in this case of the form ( x 1 ∨ · · · ∨ x n ∨ y ) where every liter al x i is false under the current pa r tial a ssignment ( ρ ( x i ) = false , ∀ i ∈ 1 ..n ), while ρ ( y ) = true . When a literal y is no t obtained by pro pagation but comes from a decision, imp ( y ) is undefined, which we no te for conv enience imp ( y ) = ⊥ . When imp ( y ) 6 = ⊥ , we deno te by e xp ( y ) the set { x | x ∈ i mp ( y ) \ { y }} , called set of explanations of y . When imp ( y ) is undefined we define e xp ( y ) as the empty set. Definition 1 (Implication Graph). L et F b e a C NF formula, ρ a p artial assignment, and let exp denotes the set of explanations for the de du c e d (u nit pr op aga te d) liter als in ρ . The implic ation gr aph asso ciate d to F , ρ and exp is G ρ,exp F = ( N , E ) wher e: – N = ρ , i.e., ther e is exactly one no de for every liter al, de cide d or implie d; – E = { ( x, y ) | x ∈ ρ, y ∈ ρ, x ∈ exp ( y ) } In the rest of this pap er, for simplicity reason, exp is omitted, a nd an impli- cation graph is simply noted as G ρ F . W e a lso note m as the conflict level. Example 1. G ρ F , shown in Figure 1 is an implication graph for the formula F and the pa rtial assignment ρ g iven below : F ⊇ { c 1 , . . . , c 12 } ( c 1 ) ¬ x 1 ∨ ¬ x 11 ∨ x 2 ( c 2 ) ¬ x 1 ∨ x 3 ( c 3 ) ¬ x 2 ∨ ¬ x 12 ∨ x 4 ( c 4 ) ¬ x 1 ∨ ∨¬ x 3 ∨ x 5 ( c 5 ) ¬ x 4 ∨ ¬ x 5 ∨ ¬ x 6 ∨ x 7 ( c 6 ) ¬ x 5 ∨ ¬ x 6 ∨ x 8 ( c 7 ) ¬ x 7 ∨ x 9 ( c 8 ) ¬ x 5 ∨ ¬ x 8 ∨ ¬ x 9 ( c 9 ) ¬ x 10 ∨ ¬ x 17 ∨ x 1 ( c 10 ) ¬ x 13 ∨ ¬ x 14 ∨ x 10 ( c 11 ) ¬ x 13 ∨ x 17 ( c 12 ) ¬ x 15 ∨ ¬ x 16 ∨ x 13 ρ = {h . . . ¬ x 1 15 . . . ih ( x 2 11 ) . . . . . . ih ( x 3 12 ) . . . x 3 6 . . . ih ( x 4 14 ) , . . . ih ( x 5 16 ) , x 5 13 , . . . i} . The conflict level is 5 a nd ρ ( F ) = f al se . Definition 2 (Asserting clause). A clause c of the form ( α ∨ x ) is c alle d an asserting clause iff ρ ( c ) = false , l ( x ) = m and ∀ y ∈ α, l ( y ) < l ( x ) . x is c al le d asserting liter al. Conflict a na lysis is the result of the applicatio n of r e solution star ting from the conflict cla use using different implications implicitly enco ded in the implication graph. W e call this pro cess an asser ting clause deriv ation (in shor t ACD). Definition 3 (Asserting clause deri v ation). A n asserting clause derivation π is a se qu enc e of clauses h σ 1 , σ 2 , . . . σ k i s atisfying t he fol lowing c ondi tions : 1. σ 1 = η [ x, imp ( x ) , imp ( ¬ x )] , wher e { x, ¬ x } is the c onfl ict. x4 x5 x8 x9 x2 x7 c1 x3 x1 c2 c3 x12(3) −x9 x11(2) x10 x14(4) x13 x16 x15(1) x6(3) x6(3) c5 c6 c7 c10 c4 c9 c8 c11 c12 x17 Fig. 1. I mplication Graph G ρ F = ( N , E ) 2. σ i , for i ∈ 2 ..k , is built by sele cting a liter al y ∈ σ i − 1 for which imp ( y ) is define d. We then have y ∈ σ i − 1 and y ∈ imp ( y ) : t he two clauses r esolve. The clause σ i is define d as η [ y , σ i − 1 , imp ( y )] ; 3. σ k is, mor e over an asserting clause. Note that every σ i is a re s olven t o f the formula F : by induction, σ 1 is the resolven t b etw een tw o clauses that dire c tly b elong to F ; for every i > 1, σ i is a reso lven t b etw een σ i − 1 (whic h, by induction h ypothesis , is a r esolven t) and a clause of F . Every σ i is therefore also an implic ate of F , that is: F | = σ i . By definition of the implication gra ph, we also have F ′ | = ∗ σ i where F ′ ⊂ F is the set of c la uses used to derive σ i . Let us consider a gain the ex ample 1 . The trav ersal of the g raph G ρ F (see Fig . 1) lea ds to the following asserting clause der iv atio n: h σ 1 , . . . , σ 7 i where σ 1 = η [ x 9 , c 7 , c 8 ] = ( ¬ x 5 5 ∨ ¬ x 7 5 ∨ ¬ x 8 3 ) and σ 7 = ( ¬ x 11 2 ∨ ¬ x 12 3 ∨ ¬ x 6 3 ∨ ¬ x 1 5 ). The no de x 1 corres p o nding to the asser ting literal ¬ x 1 is ca lled the fir st Unique Implication Poin t (First UIP). 3 Learning for dynamic subsumption In this sectio n, we show how classic al lea rning can b e adapted for an efficient dynamic subsumption o f clauses . In our appro ach, we explo it the intermediate steps or resolven ts g e nerated during the classica l conflict analysis to s ubsume some of the clauses used in the underlying r esolution der iv ation o f the asserting clause. O bviously , it would b e p ossible to consider the subsumption test b etw e en each generated resolven t and the whole set of clause s. How ev er, this could b e very costly in pr a ctice. Let us, illus tr ate some o f the main features of o ur prop osed approach. 3.1 Motiv ating example Let us recons ider a gain the example 1 and the implication gra ph G ρ F (figure 1). The as serting cla use deriv ation leading to the a sserting clause ∆ 1 is desc rib ed as follows: π = h σ 1 , σ 2 , σ 3 , . . . , σ 7 = ∆ 1 i – σ 1 = η [ x 9 , c 7 , c 8 ] = ( ¬ x 8 5 ∨ ¬ x 7 5 ∨ ¬ x 5 5 ) – σ 2 = η [ x 8 , σ 1 , c 6 ] = ( ¬ x 6 3 ∨ ¬ x 7 5 ∨ ¬ x 5 5 ) – σ 3 = η [ x 7 , σ 2 , c 5 ] = ( ¬ x 6 3 ∨ ¬ x 5 5 ∨ ¬ x 4 5 ) ⊂ c 5 (subsumption) – . . . – ∆ 1 = σ 7 = η [ x 2 , σ 6 , c 1 ] = ( ¬ x 11 2 ∨ ¬ x 12 3 ∨ ¬ x 6 3 ∨ ¬ x 1 5 ) As w e c a n see the asser ting cla use der iv ation π includes the resolvent σ 3 = ( ¬ x 6 3 ∨ ¬ x 5 5 ∨ ¬ x 4 5 ) w hich subsumes the claus e c 5 = ( ¬ x 6 ∨ ¬ x 5 ∨ ¬ x 4 ∨ x 7 ). Consequently , the literal x 7 is eliminated from the clause c 5 . In gene r al, the resolven t σ 3 can s ubsume other cla uses from the implica tion gra ph that include the literals ¬ x 6 , ¬ x 5 and ¬ x 4 . 3.2 Dynamic subsum ption: a ge neral form ulation Let us now g ive a for mal pr esentation of o ur dy na mic subsumption approach. Definition 4 (F-subsumpti on mo dulo UP). L et c ∈ F . c is F -subsu me d mo dulo Unit Pr op agation iff ∃ c ′ ⊂ c such that F | ¯ c ′ | = ∗ ⊥ Given tw o clause s c 1 and c 2 from F such that c 1 subsumes c 2 , then c 2 is F -subsumed mo dulo UP . As explained b efore, subsuming claus e s during se arch might b e time co nsum- ing. In o ur prop o sed framework, to reduce the co mputational cost, we restrict subsumption ch ecks to the intermediate reso lvents σ i and the clauses of the form imp ( y ) used to derive them (clauses enco ded in the implication graph). Definition 5. L et F b e a formula and π = h σ 1 . . . σ k i an asserting clause derivation. F or e ach σ i ∈ π , we define C σ i = { i mp ( y ) ∈ F |∃ j ≤ i st . σ j = η [ y , imp ( y ) , σ j − 1 ] } as the set of clauses of F u se d for the derivation of σ i . Pr op erty 1. Let F b e a formula and π = h σ 1 , σ 2 , . . . , σ i , . . . , σ k i an asserting clause deriv a tion. If σ i subsumes a cla use c of C σ k then c ∈ C σ i . Pr o of. As σ i +1 = η [ y , imp ( y ) , σ i ] where ¬ y ∈ σ i , we hav e σ i 6⊂ imp ( y ). The next resolution steps can no t inv olv e cla uses containing the litera l ¬ y . Otherwise, the literal y in the implicatio n gr aph will admit tw o p oss ible explanations (implica- tions), which is not p ossible by definition of the implication g raph. Consequently , σ i can no t subsume cla uses from C σ k − C σ i . Pr op erty 2. Let F be a formula and π a n as s erting clause deriv ation. If σ i ∈ π subsumes a clause c o f C σ i then c is C σ i -subsumed mo dulo UP . Pr o of. As σ i ∈ π is derived from C σ i by r esolution, then C σ i | = σ i . By definition of an asserting clause deriv ation and implication g raphs, we als o have C σ i | = ∗ σ i (see section 2.3). As σ i subsumes c ( σ i ⊆ c ), then C σ i | = ∗ c . The Prop er t y 2 shows that if a clause c enco ded in the implicatio n graph is subsumed by σ i , such subsumption c an b e captured by subs umption mo dulo UP , while the Pro per ty 1 mention that subsumption chec ks of σ i can b e restr icted to clauses from C σ i . Consequently , a p ossible g eneral dyna mic subsumption a p- proach can b e stated a s follows: Let π = h σ 1 , . . . , σ i , . . . , σ k i be an as serting resolution der iv atio n. F or ea ch re s olven t σ i ∈ π , we a pply subsumption chec ks betw een σ i and all the clauses in C σ i . In the following, we show that w e can reduce further the num b er of clauses to b e check ed for subsumption by considering only a subset of C σ i . Obviously , as σ i is a r esolven t of an ass e rting cla use deriv ation π , then there exis ts tw o paths from the conflict no des x and ¬ x r esp ectively , to one or more no des of the implication g raph as so ciated to the literals of σ i assigned a t the conflict level. Consequently , we derive the fo llowing pro pe r ty: Pr op erty 3. Let π b e an asser ting clause deriv ation, σ i ∈ π and c ∈ C σ i . If σ i subsumes c , then there exists t wo pa ths from the co nflict nodes x and ¬ x resp ectively , to one or mor e no des of the implication gra ph asso ciated to the literals of c assigned at the conflict level. The pr o of o f the pro per ty is immediate since σ i ⊂ c . As this pro pe rty is tr ue for σ i which is der ived by resolution fro m the tw o clauses inv olving x and ¬ x . Then it is a lso, true fo r its super s ets ( c ). F or a given σ i , the Pr op erty 3 leads us to ano ther r estriction of the s et of clauses to b e chec ked for subsumption. Indeed, we only need to consider the set of clauses P σ i , linked (by paths) to the tw o co nflicting litera ls x a nd ¬ x . W e illustrate this characteriza tion using the e xample 1 (see. also Figur e 1). Le t π = h σ 1 , . . . , σ 7 i where σ 7 = ( ¬ x 11 ∨ ¬ x 12 ∨ ¬ x 6 ∨ ¬ x 1 ). W e hav e C σ 7 = { c 1 , c 2 , c 3 , c 4 , c 5 , c 6 , c 7 , c 8 } a nd P σ 7 = { c 1 , c 2 , c 4 , c 5 , c 6 , c 8 } . Indeed, from the nodes x 2 of the cla use c 3 we only hav e one path to the no des x 9 . Conse- quently , the clause c 3 might b e discarded from the set o f clauses to be chec k ed for subsumption. Similarly , the no de x 7 of the cla use c 7 is not link ed with a path to ¬ x 9 . Then c 7 is not considered for subsumption tests. Pr op erty 4. Given an asserting clause deriv a tion π = h σ 1 , . . . , σ k i . The time complexity of our g eneral dynamic subsumption appro ach is in O ( |C σ k | 2 ). Pr o of. F r om the definition of C σ i , we have |C σ i | = i + 1. In the worst ca se, we need to co nsider i + 1 subsumption chec ks. Then for all σ i with 1 ≤ i ≤ k , we have to chec k P 1 ≤ i ≤ k ( i + 1) = k × ( k +3) 2 . As k = |C σ k | , then the worst case complexity is in O ( |C σ k | 2 ). The worst c ase complexity is q uadratic even if w e consider P σ k ⊂ C σ k . 3.3 Dynamic subsum ption on the fly In section 3.2, we hav e presented the genera l approa ch fo r dyna mic subsumption. Its co mplexity is qua dr atic in the num ber of clauses use d in the der iv atio n of a n asserting clause. As stated, in the intro duction, to desig n an efficient dynamic simplification technique, one need to bala nce the run time cos t and the quality of the simplification. In this s ection, we prop ose a restriction of the g eneral dynamic s ubsumption scheme, called dyna mic susbumption o n the fly , which applies subsumption o nly b etw een the current resolvent σ i and the la st cla us e from the implication graph used for its deriv ation. More prec isely , supp ose σ i = η [ y , c, σ i − 1 ], we o nly check s ubs umption be tw een σ i and c . The following prop erty gives a sufficient c o ndition under which y ca n b e remov ed fo r m c Pr op erty 5. Let π b e an ass e rting clause deriv ation, σ i ∈ π such that σ i = η [ y , c, σ i − 1 ]. If σ i − 1 − { y } ⊆ c , then c is subsumed by σ i . Pr o of. Let c = ( ¬ y ∨ α ) and σ i − 1 = ( y ∨ β ). Then σ i = ( α ∨ β ). As σ i − 1 − { y } ⊆ c , then β ⊆ α . So, σ i = α which subsumes ( ¬ y ∨ α ) = c . Considering mo dern SA T so lvers that include conflict ana ly sis, the integra- tion of this new dynamic subsumption approach can b e done with negligible additional cos t. Indeed, by using a simple counter during the conflict ana lysis pro cedure, we can verify the sufficient condition g iven in the Prop er ty 5 with a constant complexity time. Indeed, at each step of the a sserting cla use deriv ation, we ge ner ate the next r esolven t σ i from a clause c and a r esolven t σ i − 1 . In the classical implementation o f conflict analy sis, o ne can check in consta n t time if a given liter al is present in the current resolvent . Co nsequently , during the visit of the clause c , we additio nally compute the num ber n of litera ls of c that belo ng to σ i − 1 . If n ≥ | σ i − 1 | − 1 then c is s ubsumed by σ i = η [ y , c, σ i − 1 ]. 4 Exp erimen ts The ex per iments were done on a la rge panel of cr afted and industrial prob- lems co ming fro m the last comp etitions. All the instances were simplified by the SatE lite prepro cess or [8]. W e implemented our dynamic subsumption a p- proach in Minis at [9 ] and Rsat [14] and made a compa r ison b etw e en the o riginal solvers and the ones enhanced with dynamic subsumption. All the tes ts w ere made o n a Xeo n 3.2 GHz (2 GB RAM) cluster. Results a re r ep orted in sec o nds. 4.1 Crafted problem s During these exp eriments, the CPU time limit was fixed to 3 hour s. These prob- lems a re hand made and many o f them are designed to b eat all the existing DPLL solvers. They co nt ain for example Qua si-gro up instances, forced r andom SA T instances , counting, or de r ing and p ebbling instances, so cial g olfer problems, etc. 1e-04 0.001 0.01 0.1 1 10 100 1000 10000 100000 1e-04 0.001 0.01 0.1 1 10 100 1000 10000 100000 Minisat+DS Minisat 0 2000 4000 6000 8000 10000 12000 400 450 500 550 600 650 time (seconds) # instances Minisat Minisat+DS Fig. 2. Crafted problems: Minisat vs Minisat+DS The log -scaled scatter plot (in log scale ) given in the left par t of Figure 2 details the results for Mi nisat a nd Minisat+DS on each cra fted insta nce. The x-axis (res p. y-axis ) corr esp onds to the CPU time tx (resp. ty ) obtained by Minisat (r e sp. Minisat+ DS ). Each do t with ( tx, ty ) co or dinates, cor resp onds to a SA T ins ta nce. Dots b elow (re s p. ab ov e) the diago nal indica te ins ta nces where the subsumption is mor e efficient i.e. ty < tx . T his figur e clea rly shows the computational gain obtained thank s to our efficient dyna mic subsumption approach. By a utomatically counting the p oints we found that 365 instances a re solved mor e efficiently thro ugh dyna mic subsumption. In some cases the gain is up to 1 order of magnitude. Of co urse, ther e exists instances wher e subsumption decreases the p erformances of M inisat (178 ins tances). The right part of the Figure 2 shows the same results with a different rep- resentation which gives for each technique the num ber of solved instances (# instances) in less than t seco nds. This Figure confirms the efficiency o f our dy- namic subsumption approa ch o n these problems. O n several cla sses the num ber of removed literals is very imp orta nt e.g., x * , QG * , php * , parity * . On the genurq * , mod * , and urquhart * the proble m is s implified during each conflict analys is . Figure 3 s hows result for Rsa t and Rs at+DS . Overall we ca n see that the ad- dition of our dynamic subsumption pro cess to R sat improv es the p er formance. The fine a nalysis of the left part of Figure 3 showed that Rsa t+DS solves 327 instances mor e efficient ly than Rsat , which so lves 219 problems more efficiently than its opp onent. Int erestingly we can rema rk that the p erformances of Rsat and Rsat+DS is worse than the o nes o f Minisat a nd Mini sat+DS . This comes fro m the rapid res ta rt strateg y used by this algor ithm which do es no t pay off on crafted problems. 0.0001 0.001 0.01 0.1 1 10 100 1000 10000 100000 0.0001 0.001 0.01 0.1 1 10 100 1000 10000 100000 Rsat+DS Rsat 0 2000 4000 6000 8000 10000 12000 250 300 350 400 450 time (seconds) # instances Rsat Rsat+DS Fig. 3. Crafted p roblems: Rsat vs Rsat+DS 4.2 Industrial problem s With these problems, the time limit was set to 3 hours. T able 1 provides detailed results on the SA T industria l problems fr om the Sat-comp etition 200 7 a nd Sat- Race 200 8. The first column repres e n ts the instances families . The sec ond column (#inst.) indicates the total num ber of instances in each family . F ollowing columns present results for res pe c tively Rsat , R sat+DS , Minisat , and Minisat+ DS . In each of these columns the first num ber represents the n um ber of instances solved, and the num ber in par enth esis represents the num ber of instances solved more quic kly than the opp onent. The last row of the ta ble g ives the total of each column. W e can see that Rsa t+DS a nd Minisat+DS ar e in general faster and solves mo re problems than Rsat a nd Minisat r esp ectively . T able 2 , fo cuses o n some industrial families. In these families , the sp eed- up are relatively imp or tant. F or ins ta nce, if w e consider the vmp c family , w e can see that o ur dynamic s implifica tion a llows a one or der of mag nitude im- prov emen t with Rsa t+DS (instances 2 4, and 25 ). On the same family , on the 9 s olved instances by Rsat+DS and Rsat , Rsat+D S is b etter on 8 instances. While Minisat+DS is b etter than Minisa t on 5 instances among the 7 so lved instances. Overall, o ur exp eriments allow us to demonstrate tw o things . Firs t our tech- nique do es no t degr ade and often improv e the p erforma nce o f DPLLs on in- dustrial pro blems. Second, it enha nces the applicability of these alg orithms on classes of problems which a r e ma de to be challenging for them. Since the imple- men ting of our a lgorithm is ra ther simple, we think that overall, it r epresents an int eresting contribution for the robustness of mo dern DPLLs. 5 Related W orks In Da rras et al. [5 ], the autho rs prop os ed a prepro cess ing ba s ed on unit pr opaga- tion for sub-clauses deduction. Consider ing the implication gr a ph ge ne r ated by the constraint propa gation pro cess a s a resolution tree, the prop osed approach familie s # inst. Rsat Rsat+DS Minisat Mini sat+DS IBM * 53 15(7) 17 ( 10 ) 15( 10 ) 15(7) APro * 16 12( 7 ) 12(5) 14 (6) 13( 8 ) mizh * 10 10( 7 ) 10(3) 10(5) 10(5) P artial * 20 6(2) 7 ( 5 ) 1(0) 2 ( 2 ) total * 20 13(6) 13( 8 ) 10 (5) 9( 6 ) dated * 20 15(6) 16 ( 10 ) 14 ( 10 ) 13(4) braun * 7 4(1) 4( 3 ) 5(2) 5( 3 ) vele v * 10 2 (0) 2( 2 ) 2 ( 2 ) 1(0) sort * 5 2( 2 ) 2(0) 2(0) 2( 2 ) manol * 10 8(3) 8( 5 ) 8( 5 ) 9 (4) vmp c * 10 9(1) 9( 8 ) 6(2) 7 ( 5 ) clause * 5 3( 2 ) 3(1) 3(0) 3( 3 ) cub e * 4 4(2) 4(2) 4(1) 4( 3 ) gold * 4 2 ( 2) 2 ( 0 ) 2(0) 2( 2 ) safe * 4 2(0) 2( 2 ) 1(0) 1( 1 ) simon * 5 5 ( 4 ) 5 (1) 5( 3 ) 5(2) block * 2 2( 2 ) 2(0) 2(0) 2( 2 ) dspam * 10 10(5) 10(5) 10(5) 10(5 ) sc hup * 3 3(2) 3(1) 3( 2 ) 3(1) p ost * 10 8(3) 8( 5 ) 5(3) 6 (3) ibm * 20 20(6) 20( 14 ) 19(6) 19( 13 ) T otal 248 155(70) 159 ( 90 ) 141(67) 141( 81 ) T abl e 1. In dustrial problems instances Rsat Rsat+DS Min isat Minisat+D S vmp c 33 5540 1562 – – vmp c 29 2598 1302 – 1252 vmp c 30 366 105 3111 2039 vmp c 27 593 327 1159 637 vmp c 31 – – – – vmp c 25 39 1 830 318 vmp c 26 182 69 1239 1235 vmp c 34 3366 944 – – vmp c 24 43 8 82 210 vmp c 28 173 488 3859 547 8 partial-5-11-s 931 176 – 2498 partial-5-13-s 503 71 3248.38 669 partial-5-15-s 737.064 825 – – partial-10-11-s 1242 875 – – partial-5-19-s 1134 498 – – partial-5-17-s 7437.82 10610 – – partial-10-13-s – 3237 – – ibm-2002-04r-k80 90 33 113 152 ibm-2002-11r1-k45 67 29 102 65 ibm-2002-18r-k90 265 157 1044 769 ibm-2002-20r-k75 36 185 2112 668 ibm-2002-22r-k60 738 691 5480 3434 ibm-2002-22r-k75 363 349 1109 688 ibm-2002-22r-k80 285 298 894 642 ibm-2002-23r-k90 1477 965 7127 2670 ibm-2002-24r3-k100 273 256 133 249 ibm-2002-25r-k10 3104 311 8 2877 3172 ibm-2002-29r-k75 353 248 272 1107 ibm-2002-30r-k85 3853 592 – – ibm-2002-31 1r3-k30 1203 652 1150 998 ibm-2004-01-k90 114 30 251 726 ibm-2004-1 11-k80 394 222 559 329 ibm-2004-23-k100 326 687 3444 2743 ibm-2004-23-k80 465 563 2060 1584 ibm-2004-29-k25 290 210 1061 1017 ibm-2004-29-k55 533 16 558 124 ibm-2004-3 02 3-k95 1 2 1 2 T abl e 2. Zo om on industrial families deduces sub-clauses from the original formula. Howev er, their pro p o sed dyna mic version is clea rly time consuming. The ex pe r imental ev aluation is only given in term of nu m ber o f no des. In [16], an algorithm for main taining a subsumption-free CNF clause database is presented. It efficiently detects and remov es s ubsumption when a lea rnt cla use is added. Additionally , the algorithm compac ts the database greedily b y recur - sively applying resolutio ns in order to decrement the size of the data base. Conflict-clause shrinking was intro duced in Minisat 1.14 [7]. It is also im- plement ed in PicoSA T [4]. It r e moves litera ls from learnt clauses by resolving recursively with clauses of the implica tion gra ph. Remark that in the prev ious exp eriments, our base solvers Minisat and Rsat implement this technique. 6 Conclusion This pap er pr e sents a new subs umption technique for Bo olea n CNF formulae. It makes an original use o f learning to reduce origina l or lea r nt clauses. At each conflict, and during the a sserting clause deriv a tion pro cess , subsumption betw een the g enerated resolvents and some clauses enco ded in the implication graph is c hec ked using an efficien t sufficient condition. Interestingly , s inc e our subsumption technique relies on the clauses used in the deriv a tion of an ass erting clause, it tends to simplify pa rts of the for m ula iden tified as impo rtant by the activity-based search strategy . Exp erimental results show that the integration of our metho d within tw o state-of-the-ar t SA T solvers Minisat and Rsat par ticularly b enefits to cr afted problems and achiev es interesting improv emen ts on several indus tr ial families. As a future w ork, we plan to in v estigate how to efficiently extend our a p- proach to achieve ex haustive clauses subs umption. Another int eresting path of resear ch would be to exploit our subsumption framework to fine tune the ac- tivit y bas ed stra tegy . Indeed, ea ch time a literal is eliminated, this mea n that a new conflict clause is derived and all the resolven ts used in such deriv ation ar e useless and c an b e dropp ed from the implication gr aph. References 1. R ob erto J. Bay ardo, Jr. and Rob ert C. S chrag . Using CSP look-back techniques to solve real-wo rld SA T instances. In Pr o c e e dings of the F ourte enth National Con- fer enc e on Artificial I ntel li genc e (AAAI’ 97) , pages 203–208, 1997. 2. Paul Beame, Henry A. K autz, and Ashish Sabharwa l. Understanding t he p ow er of clause learning. In Georg Gottlob and T oby W alsh, editors, IJCAI , p ages 1194– 1201. Morgan Kaufmann, 2003. 3. A Biere and N . E´ en. Effective preprocessing in sat through va riable and clause elimination. In Pr o c e e di ngs of the Eighth International Confer enc e on The ory and Applic ations of Satisfiabili ty T esting (SA T’05) , 2005. 4. A rmin Biere. Picosat essen tials. Journal on Satisfiability, Bo ole an Mo deling and Computation (JSA T) , 4(1):75–97, 2008. 5. S . Darras, G. Deq uen, L. Devendeville, B. Mazure, R. O stro wski, and L. Sa ¨ ıs. Using Bo olean constraint propagation for sub-clauses deduction. In Pr o c e e dings of the Eleventh International C onfer enc e on Principles and Pr actic e of Constr ai nt Pr o gr amming(CP’05) , pages 757–761, 2005. 6. M. Da vis, G. Logemann, and D. W. Lov eland. A machine program for theorem- proving. Communi c ations of the ACM , 5(7):394–397, 1962. 7. N . Een and N. S¨ orensson. Minisat - a sat solv er with conflict- clause minimization. In Pr o c e e dings of the Eighth International Confer enc e on The ory and Applic ations of Satisfiabili ty T esting (SA T’ 05) , 2005. 8. N . E´ en and A . Biere. Effective prepro cessing in S A T through va riable and clause elimination. In Pr o c e e di ngs of the Eighth International Confer enc e on The ory and Applic ations of Satisfiabili ty T esting (SA T’05) , pages 61–75, 2005. 9. N iklas E´ en and Niklas S¨ orensson. An exten sible sat-solver. In Pr o c e e dings of the Sixth International Confer enc e on The ory and Applic ations of Satisfiability T esting (SA T ’ 03) , p ages 502–518, 2002. 10. Carla P . Gomes, Bart Selman, and Henry Kaut z. Bo osting combinatorial search through randomization. In Pr o c e e dings of the Fi fte enth National Confer enc e on Ar tificial I ntel li genc e (AAAI’97) , pages 431–437, Madison, Wisconsin, 1998. 11. H . Kautz, E. Horvitz, Y. Ru an, C. Gomes, and B. S elman. D ynamic restart p oli- cies. In Pr o c e e di ngs of the Eighte enth National Confer enc e on Artificial Intel ligenc e (AAAI’02) , pages 674–682 , 2002. 12. Joao P . Marques-Silv a and Karem A . Sak all ah. GRASP - A New Searc h Algo- rithm for Satisfiability . In Pr o c e e di ngs of IEEE/ACM I nternational Confer enc e on Computer-A ide d Design , pages 220–227 , Nov em b er 1996. 13. M. W. Moskew icz, C. F. Madigan, Y. Zhao, L. Zhang, and S. Malik. Chaff: En- gineering an efficient SA T solver. In Pr o c e e dings of the 38th Design Automation Confer enc e (DA C’ 01) , p ages 530–535, 2001. 14. Kn ot Pipatsrisa w at and Adnan Darwiche. A ligh t w eigh t comp onent cac h ing sc heme for satisfiabilit y solv ers. In Pr o c e e di ngs of 10th International C onfer enc e on The ory and Appl i c ations of Satisfiability T esting(SA T) , p ages 294–299 , 2007. 15. Sath iamoorthy Subbaray an and Dhira j K. Pradhan. N iVER: Non-increasing v ari- able elimination resolution for prepro cessing SA T instances. In Pr o c e e dings of the Seventh International Confer enc e on The ory and Applic ations of Satisfiability T esting (SA T’04) , pages 276–291, 2004. 16. Lintao Zhang. On su b sumption remov al and on- the-fly cnf simplification. In SA T’2005 , pages 482–489, 2005.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment