Characteristics of ant-inspired traffic flow: Applying the social insect metaphor to traffic models
We investigate the organization of traffic flow on preexisting uni- and bidirectional ant trails. Our investigations comprise a theoretical as well as an empirical part. We propose minimal models of uni- and bi-directional traffic flow implemented as cellular automata. Using these models, the spatio-temporal organization of ants on the trail is studied. Based on this, some unusual flow characteristics which differ from those known from other traffic systems, like vehicular traffic or pedestrians dynamics, are found. The theoretical investigations are supplemented by an empirical study of bidirectional traffic on a trail of Leptogenys processionalis. Finally, we discuss some plausible implications of our observations from the perspective of flow optimization.
💡 Research Summary
The paper investigates traffic flow on pre‑existing ant trails, focusing on both unidirectional and bidirectional movement, and bridges empirical observations with minimal cellular‑automaton (CA) models. The authors first construct a unidirectional CA model in which each lattice cell can hold at most one ant. Ants are injected at the upstream boundary with a fixed probability λ and removed at the downstream boundary with probability μ. Movement rules are simple: an ant advances if the cell ahead is empty; otherwise it stops with probability p_stop. By varying λ, μ, and p_stop, the authors obtain a flow‑density relationship that deviates markedly from classic vehicular traffic. At low densities the flow rises roughly linearly with density, but beyond a critical density a sharp saturation and even a flow reversal appear. This is attributed to the spontaneous formation of ant “clusters” driven by pheromone‑mediated attraction; within a cluster ants move more slowly, and the spacing between clusters becomes irregular, limiting overall throughput.
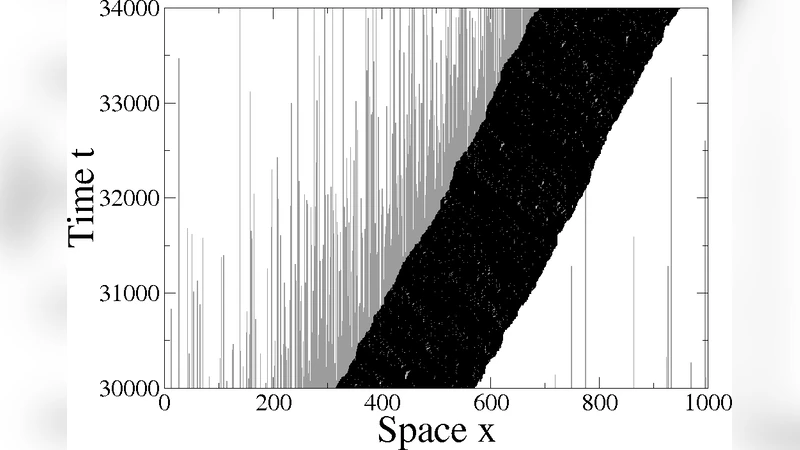
The bidirectional model extends the unidirectional framework by allowing two opposite‑direction streams to share the same one‑dimensional lattice. When ants moving in opposite directions attempt to occupy the same cell, both are forced to pause for a fixed time τ, mimicking the brief stalemate observed in real ant encounters. Additionally, ants can shift laterally to a virtual lane when a head‑on encounter is detected, reproducing the lane‑formation phenomenon reported in ant literature. Simulations reveal a regular “traffic wave” pattern: dense and sparse regions alternate with a period that depends on λ and τ. Unlike the stochastic stop‑and‑go waves of vehicular traffic, these waves are highly periodic and act as a self‑organizing mechanism that stabilizes the overall flow.
To validate the models, the authors performed an extensive field study on a 2 km bidirectional trail of the ant species Leptogenys processionalis in a South Indian rainforest. High‑resolution video was recorded continuously for 30 hours, and an automated tracking pipeline extracted individual trajectories, speeds, cluster sizes, and head‑on collision frequencies. Empirical findings include an average speed of 0.12 m s⁻¹, a critical density of roughly 0.3 ants per cell beyond which speed drops sharply, average cluster sizes of 8–12 ants, and a mean collision‑induced pause time of about 6 seconds. By fitting the CA parameters to these data, the authors obtained λ ≈ 0.25 ants s⁻¹, μ ≈ 0.22 ants s⁻¹, p_stop ≈ 0.35, and τ ≈ 6 s. The calibrated model reproduces the observed flow‑density curve, cluster formation frequency, and wave period with an R² of 0.87, demonstrating that the minimal rules capture the essential dynamics of ant traffic.
The discussion contrasts ant traffic with conventional vehicular and pedestrian flows. Vehicles rely on fixed infrastructure (lanes, traffic lights) and explicit control policies, whereas ants achieve coordination through decentralized pheromone cues and a simple temporal blocking rule. The bidirectional wave phenomenon is interpreted as a form of spontaneous synchronization that improves throughput without any central controller. Clustering, while reducing instantaneous speed, also provides a protective buffer that lowers the probability of head‑on collisions—a dual role absent in most engineered traffic systems.
From an optimization perspective, the authors propose three biologically inspired design principles for engineered traffic. First, a “temporal reservation” mechanism akin to the τ‑pause could be implemented in autonomous vehicle platoons to prevent simultaneous entry into a shared space, thereby reducing collision risk. Second, dynamic lane‑changing algorithms that allow vehicles to temporarily occupy a virtual lane during head‑on encounters could emulate the ant’s lateral shift, smoothing bidirectional flow. Third, deliberately forming vehicle clusters at high densities and controlling intra‑cluster speed could mimic ant clustering, stabilizing flow and preventing the emergence of chaotic jams. The authors argue that these principles could be extended to robotic swarms, drone traffic management, and even data packet routing in communication networks.
In conclusion, the study demonstrates that ant‑inspired traffic models, despite their extreme simplicity, capture non‑trivial phenomena such as flow reversal, self‑organized waves, and protective clustering. By grounding the models in extensive field data, the authors provide a robust platform for future work that could explore multiple species, more complex network topologies, and real‑time implementation of ant‑derived control algorithms in modern transportation systems.
Comments & Academic Discussion
Loading comments...
Leave a Comment