Non Linear System for a Veritable PID Substitute
The paper deals with a non-linear system largely used in biology, which, in certain conditions and for particular coefficient values, becomes linear, with a linear diagram over a large range of time. It can be used as a veritable regulator in systems’ control
💡 Research Summary
The paper investigates the classical Lotka‑Volterra predator‑prey model, a pair of nonlinear ordinary differential equations commonly used in biology to describe the interaction between a predator population (P) and a prey population (H). The equations are written in the form
dP/dt = −m P + b H P
dH/dt = a H P − r H
where a, b, r, and m are constant coefficients representing interaction strength, predator growth per prey, prey intrinsic growth, and predator mortality, respectively. The authors claim that, although the system is inherently nonlinear and typically exhibits oscillatory or chaotic dynamics, there exist specific sets of coefficient values for which the trajectories become almost perfectly linear over a long time horizon.
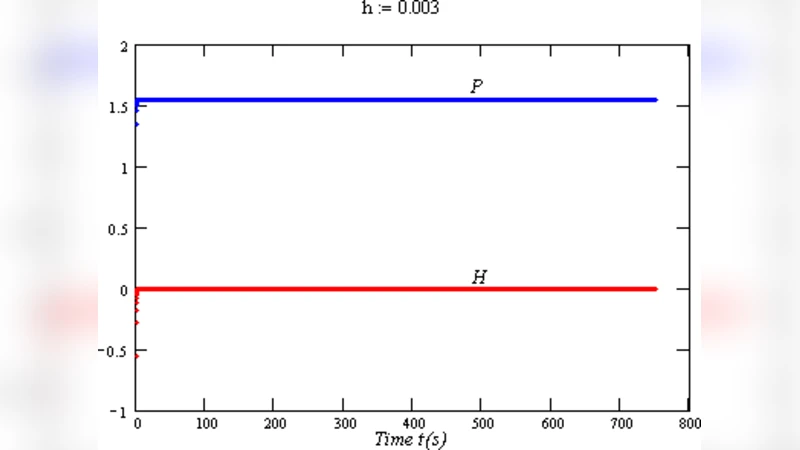
To explore this claim, the authors performed numerical simulations using both a fourth‑order Runge‑Kutta scheme and a second‑order Euler method (referred to as “Euler II”). They varied the parameters across several combinations, such as (2, 10, 25), (0.04, 0.03, 1.8), and a “linearizing” set (m = 1, b = 100, a = 1000, r = 0.00001). For each set they plotted predator and prey populations versus time, producing figures labeled 2.1, 3.1, and 3.2. Figure 2.1 shows the typical nonlinear evolution with early bifurcations that gradually merge, leading to a final segment that appears linear. Figures 3.1 and 3.2 illustrate the case where the chosen coefficients produce a trajectory that is essentially a straight line from the beginning to the end of the simulation.
The authors interpret these results as evidence that the Lotka‑Volterra system can transition from a chaotic or highly nonlinear regime to a quasi‑linear regime simply by adjusting the magnitude of the interaction coefficients. They argue that, because the system behaves like a first‑order linear differential equation (dx/dt ≈ k x) over a substantial interval, it could serve as a “veritable regulator” in control applications, effectively replacing the traditional proportional‑integral‑derivative (PID) controller. The paper suggests that the linear segment could provide the proportional action, while the gradual approach to linearity could mimic integral and derivative effects, thereby offering a unified nonlinear‑to‑linear control element.
However, the manuscript lacks a rigorous theoretical foundation for the observed linearization. No stability analysis, eigenvalue study, or singular perturbation argument is presented to explain why the particular coefficient ratios cause the nonlinear terms to cancel or become negligible. Moreover, the paper does not discuss the sensitivity of the linear segment to disturbances, parameter drift, or model uncertainties—issues that are central to any practical controller design. The reliance on numerical experiments alone, without analytical proofs or real‑world validation, limits the credibility of the claim that the system can replace a PID controller in engineering practice.
The conclusion reiterates that the biological differential‑equation model can become linear under certain conditions and that this property could be exploited for control purposes. The authors also note that the system inherits some chaotic characteristics from its nonlinear origin, but that these can be “tamed” into linear behavior through appropriate coefficient selection.
In summary, the paper presents an intriguing observation that a classic nonlinear ecological model can exhibit extended linear dynamics for specific parameter choices. While the numerical evidence is suggestive, the work falls short of providing the mathematical justification, robustness analysis, and experimental validation required to substantiate the claim that such a system can serve as a practical PID substitute. Future research should focus on deriving explicit linearization conditions, performing Lyapunov‑based stability assessments, and testing the approach on actual control plants (e.g., temperature regulation, motor speed control) to determine its feasibility and performance relative to conventional PID controllers.
Comments & Academic Discussion
Loading comments...
Leave a Comment