Selfish Distributed Compression over Networks: Correlation Induces Anarchy
We consider the min-cost multicast problem (under network coding) with multiple correlated sources where each terminal wants to losslessly reconstruct all the sources. We study the inefficiency brought forth by the selfish behavior of the terminals i…
Authors: Aditya Ramamoorthy, Vwani Roychowdhury, Sudhir Kumar Singh
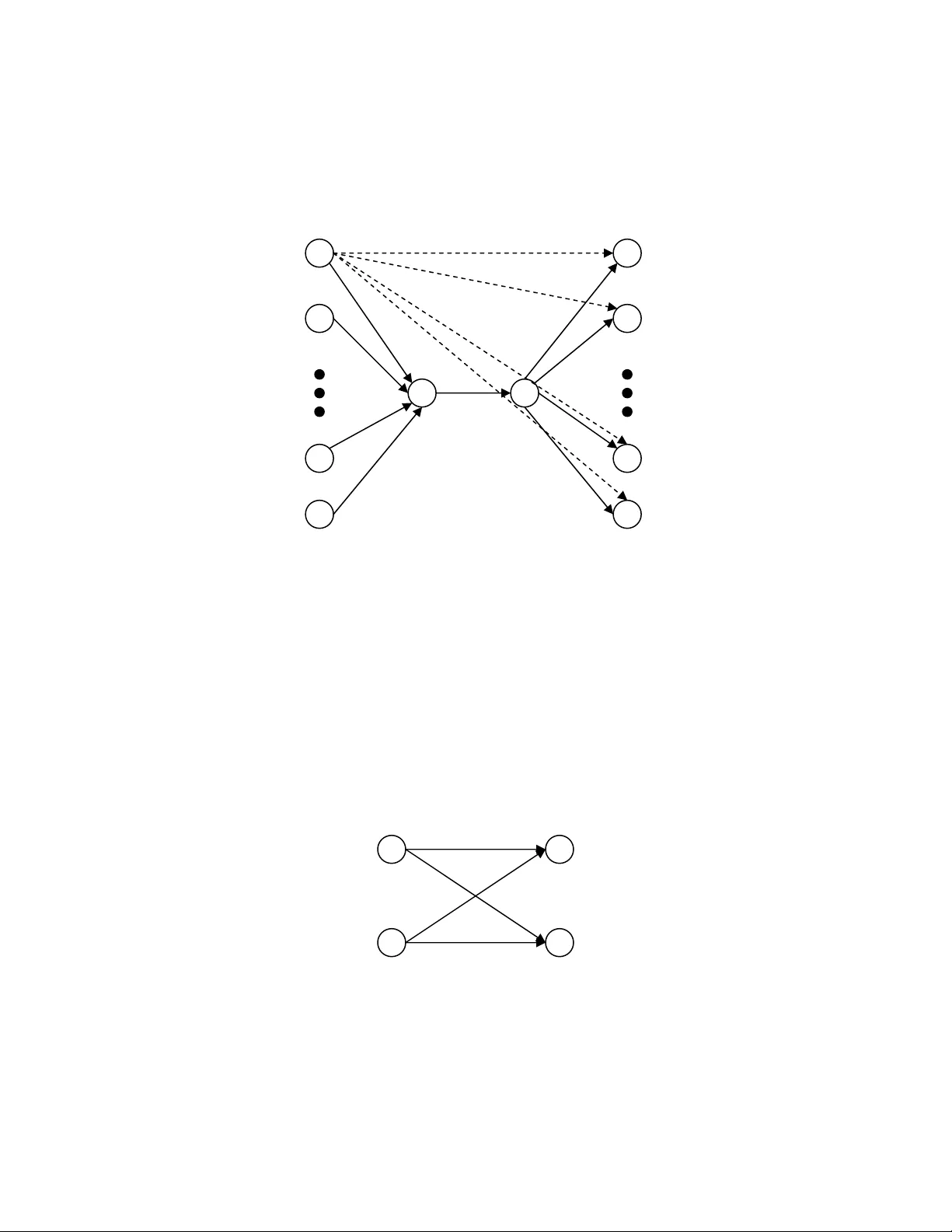
Selfish Distributed Compress ion ov er Networks: Correlatio n Induces Anarchy Aditya Ramamoorthy ∗ Vwani Roycho wdhury † Sudhir Kumar Singh ‡ October 25, 2018 Abstract W e consider the min-cost multicast problem (u nder n etwork coding) with mu ltiple corre lated source s where each terminal wants to losslessly reco nstruct all the sources. This can be co nsidered as th e net- work gene ralization of the classical d istributed source c oding (Slep ian-W olf) p roblem. W e study th e inefficiency br ought fo rth by the selfish behavior of the terminals in th is scenar io by mod eling it as a nonco operative game among the terminals. The solutio n concept that we adopt for this game i s the pop- ular local Nash eq uilibrium (W ar drop equilibriu m) adapted for the scena rio with mu ltiple so urces. The degradation in per forman ce due to the lack of regulation is measured by the Price of An ar chy ( PO A), which is defined as the ratio between th e cost of the w orst possible W ar drop equilibrium and the socially optimum cost. Our main r esult is that in co ntrast with the case o f in depend ent sources, the presence of source correlation s can sign ificantly increase the price of anarch y . T owards establishing this result we make several contributions. W e ch aracterize the socially optimal flow and rate allocation in terms of four in tuitiv e c ondition s. This re sult is a key technical contribution of this p aper and is o f indep endent interest as well. Next, we show that the W ardrop equilibr ium is a socially optimal s olution for a different set of (related ) cost functions. Usin g this, we constru ct e xplicit examples that demonstrate that the PO A > 1 and d etermine near-tight u pper boun ds o n the PO A as well. The main tech niques in ou r an alysis are L agrang ian duality theory and the usage o f the supermod ularity o f cond itional entropy . Finally , all the techniques and results in th is paper wil l naturally extend to a large class of network informa tion flow problem s wh ere the Slepian-W olf po lytope is replaced by any contra- polymatr oid (or more generally polymatr oid-like set), leading to a nice class of succin ct multi-play er games and allow the invest igation of other practical and meaning ful scenarios beyond network coding as well. 1 Introd uction In lar ge scale networks such as the Intern et, the agents in v olv ed in producing and transmitting information often exhibi t selfish beha vio r e.g. if a pack et needs to trav erse the networ k of vario us ISP’ s, each ISP will beha v e in a greedy manner and ensure that the packet spends the minimum time on its network . While this minimizes the ISP’ s cost it may not be the best strate gy from a ov erall network cost pers pecti ve . Selfish routin g, that deals with the question of netw ork performance under a lack of regul ation has been studied ext ensi vel y (see [20, 25]) and has dev eloped as an area of intense research activ ity . Howe v er , by and lar ge most of these studies hav e consider ed the network traf fic injecte d into the network at vario us source s to be indepe ndent. ∗ Department of Electrical and Computer Engineering, Iow a State Univ ersity , Ames, Iow a 50011. Email: adityar@iastate. edu † Department of Electrical Engineering, Univ ersity of California, Los Angeles, CA 90095. & NetSeer Inc., Santa Clara, CA 95054. Email:vwani@ee.ucla.edu ‡ NetSeer Inc., Santa Clara, CA 95054. Email:suds@ee.ucla.edu 1 From an inf ormation theoreti c perspe cti ve there is no n eed to consid er the source s in v o lved in the tran s- mission to be independ ent. In this work we initiate the study of network optimizatio n issues related to the transmis sion of correlated sources ove r a netwo rk w hen the agents in v olv ed are selfish. In particular , we concen trate on the problem of multicastin g correlated sources ove r a network to dif ferent terminals, w here each terminal is interes ted in losslessly recons tructing all the s ources. W e assume that the network is capable of network coding. Under this scenario, a generalizat ion of th e classical Slepia n-W olf th eorem of distrib uted source codin g [14] holds for arbitra ry networks. In particul ar , when the network perfor ms rand om linear netwo rk coding each terminal can recov er the sources under appropria te conditions on the Slepian-W olf re- gion and the capacity regi on of the termin als with respect to the sou rces, thereby al lo wing dis trib uted source coding ov er networks . The selfish agents in our set-up are the terminal s who pay for the resourc es. Each terminal aims to minimize her own cost while ensuring that she can satisfy her demands. It is importan t to note that this is a generaliz ation of the problem of minimum cost selfish m ulticas t of indepe ndent sources consid ered by Bhadra et al. [5]. 1.1 Our Results In this work, we model the scenar io as a noncooper ati ve game amongs t the selfish terminals w ho request rates from sources and flo ws ov er network paths such that their indi vidua l cost is minimized (i.e. with no reg ard for social welfa re) while allo wing for reconstruc tion of all the sources. W e in vestigate properties of the socially optimal solution and define appropriate solution conce pts (Nash equilibrium and W ardrop equili brium) for this game and in v estiga te propertie s of the flow-rate s at equilib rium. W e briefly describ e our contrib u tions below . i) Ch aract erizatio n of soci al-optima lity conditi ons. The pr oblem of c omputing the socially optimal co st is a con v ex progra m. W e present a precis e characteriza tion of the optimalit y conditi ons of this con- ve x progr am in terms of fo ur intuiti ve condit ions, using Lagran gian duality theory and by judicio usly exp loiting the super -modular ity of conditiona l entrop y . This result is a key techni cal contr ib ution of this paper and is of indepen dent interest as well. ii) Demonstr ating the equival ence of flow-r ates at equilibrium with social-op timal solutions for alter - native instances. W e consider certai n meaningful mark et models that split resourc e costs among st the dif ferent terminals and sho w that the flo ws and rates under the game-the oretic equilib riums are in fact socially optimal soluti ons for a differ ent set of cost functions. This characteriza tion allows us to quanti fy the degra dation caused by the lack of regulati on. T he measure of performance degr adation due to such loss in regu lation that we adopt is the Price of Anar chy (PO A), which is defined as the ratio between the cost of the worst possible e quilibr ium and the socially optimum cost [15, 22, 2 6, 25]. iii) Showing that sour ce corr elation induce s anar c hy . The main result of this work is that the presen ce of sourc e correlat ions can si gnificantly inc rease the P O A under rea sonable cost-s plitting mechanis ms. This is in stark contras t to the case of m ulticas t with independen t sources , where for a large class of cost fun ctions, cost-spl itting mechanisms can b e desig ned that ensure that t he price of a narchy is o ne. W e cons truct ex plicit examples where t he POA is greater than one and also obt ain an upper bound on the POA which is near tight. Finally , we expect that the technique s de velo ped in the present work will be applicable to a large class of network informat ion flow pro blems with correlated sources where the Slepian-W olf polytope is replaced 2 by polymat roid-lik e objects . These include multi-termina l source coding with high resolutio n [28] and the CEO problem [23]. 1.2 Backgr ound and Related W ork Distrib uted sou rce coding (o r distr ib uted compres sion) (see [7], C h. 14 for an ov ervie w) co nsiders the p rob- lem of compressing multiple discrete memoryless source s that are obser ving correl ated random vari ables. The landmark result of Slepian and W olf [27] charact erizes the feasible rate region for the recov ery of the source s. H o wev er , the prob lem of Slepian and W olf cons iders a direct link between the sources and the terminal. More general ly one woul d expect that the s ources communicate with the terminal o ver a ne twork. Dif ferent aspects of the Slepian-W olf probl em over netw orks hav e been considered in ([2, 8, 24]). Network coding (first intr oduced in the seminal work of Ahlswede et al. [1]) for correlated so urces w as studie d by Ho et al. [14]. T hey conside red a ne twork with a set of sour ces and a set of terminals an d sho wed that as lon g as the minimum cuts between all non-empty su bsets of sources an d a particula r terminal were suf ficiently lar ge (essen tially as long as the Slepian- W olf region of the s ources has an inte rsection with the capac ity region of a giv en terminal), random linear networ k coding ove r the network follo wed by appropriate decoding at the terminals achie ves the Slepian-W olf bounds. The problem of minimum cost multicast under network coding has been addresse d in the work of [19, 18]. The multicast problem has also been examin ed by consider ing selfish agents [5, 16, 17]. Our work is closes t in spirit to the analysis of Bhadra et al. [5] that conside rs selfish termina ls. In this scenario , for a lar ge clas s of edge cost functions, the y de velop a pricing mecha nism for allocating the edge costs among the dif ferent terminals a nd sho w that it lea ds to a glo bally optimal solution to the original opt imization prob lem, i.e. the price of anarchy is one. Their PO A analysis is similar to that in the case of selfish routing [26, 25]. Our model is more general and our results do not generalize from theirs in a straightfo rward manner . In particu lar , we need to judiciousl y exploit sev eral non-tri vial prope rties of the S lepian -W olf polytop e in our analys is. Further , moti va ted by the need to deal with selfish users, partic ularly in network setting, there has been a large bod y of recent work at the inters ection of networki ng, game theory , economics, an d theore tical compute r science [20, 4, 13]. This work adds anoth er interesti ng dimension to this interdi sciplina ry area. 2 The Model Consider a direc ted graph G = ( S ∪ T ∪ V , E ) . There is a set of s ource nodes S that may be correlated an d a set of sinks T that are t he t erminals (i.e. recei vers) . Each source n ode observes a discre te memoryl ess so urce X i . The Slepian-W olf region of the sources is assumed to be known and is denoted R S W . For notation al simplicit y , let N S = | S | , N T = | T | , S = { 1 , 2 , . . . , N S } , and T = { t 1 , t 2 , . . . , t N T } . The set of paths from source s to terminal t is denoted by P s,t . Further , define P t = ∪ s ∈ S P s,t i.e. the set of all possible paths going to terminal t , and P = ∪ t ∈ T P t , the set of all possible paths. A flow is an assignmen t of non-neg ati ve reals to each path P ∈ P . The flow on P is denoted f P . A r ate is a function R : S × T − → R + , i.e. the rate requested by the terminal t from the source s is R s,t . W e will refer to a flow and rate pair ( f , R ) as flow-r ate . Also, let us deno te the rate vec tor for terminal t by R t and the vect or of requested rates at source s by ρ s i.e. R t = ( R 1 ,t , R 2 ,t , . . . , R N S ,t ) and ρ s = ( R s,t 1 , R s,t 2 , . . . , R s,t N T ) . Associat ed with each edge e ∈ E is a cost c e , which tak es as argu ment a scalar vari able z e that depen ds on the fl o ws to variou s terminals passing through e . Similarly , let d s be the cost function correspond ing to the source s , which takes as ar gument a scalar var iable y s that depends on the rates that va rious terminals request from s . These functions c e ’ s and d s ’ s are assumed to be con vex, positive , dif fer entiable and m onoton ically incr easing . Further , the functions R c e ( x ) x dx are also con vex, posit iv e, differe ntiable and m onoton ically 3 increa sing. In particu lar , these condi tions are satisfied by functio ns like x a , a > 1 and xe bx , b > 0 among others . The network connec tion w e are interes ted in suppo rting is one w here each terminal can recons truct all the sources. i.e. we need to jointly allocate rates and fl o ws for each terminal so that it can reconst ruct the source s. W e now pr esent a formal description of the optimization problem under considera tion. 2.1 Min-Cost Multicast with Multiple Sour ces Let us call the quad ruple ( G, c, d, R S W ) an inst ance . The problem of minimizing the total cost for the instan ce ( G, c, d, R S W ) can be formula ted as minimize C ( f , R ) = X e ∈ E c e ( z e ) + X s ∈ S d s ( y s ) subjec t to f P ≥ 0 ∀ P ∈ P ( N I F − C P ) X P ∈ P s,t f P ≥ R s,t ∀ s ∈ S, ∀ t ∈ T (1) R t ∈ R S W ∀ t ∈ T where z e , ∀ e ∈ E is a function of x e,t 1 , x e,t 2 , . . . , x e,t N T , that we denote z e ( x e,t 1 , x e,t 2 , . . . , x e,t N T ) with x e,t = P P ∈ P t : e ∈ P f P ∀ e ∈ E , ∀ t ∈ T , and y s , ∀ s ∈ S is a functio n of ρ s that we will denote y s ( ρ s ) . The formula tion abo ve is similar to the one present ed in [5]. Ho w e ver since we consider source cor - relatio ns as well, their formulatio n is a specific case of our formula tion. Since network coding allows the sharin g of edges, the penal ty at an edge is only the maximum and not the sum i.e. z e is the maximum flow (among the dif ferent terminals) across the edge e . Similarly , the penalty at the source s for higher resolut ion quanti zation is also dri ven by the m aximum lev el request ed by each terminal i.e. y s is also maximum. In this wo rk, for dif ferentiabili ty requirements the maximum functi on w ill be a pproximat ed as L p norm with a lar ge p . Ne ver theless, most of our analysis is done where z e and y s are non-decr easing functio ns partia lly dif ferentiable with respect to their ar guments, such that c e ( z e ) and d s ( y s ) are con ve x, pos iti ve, dif ferentiab le and monotonic ally increas ing. Note that in the formulation abo ve, the objecti ve function is con ve x and all constr aints are linear which implies that this is a con ve x optimization problem. The constraint (1) abov e models the fact that the total fl o w from the source s to a terminal t needs to be at least R s,t . Finally , the rate point of each terminal R t needs to be within the Slepian-W olf polytope . A flow-rate ( f , R ) satisfy ing all the condit ions in the abov e optimizati on problem (i.e. (NIF-CP) ) will be called a feasible flow-rate for the instance ( G, c, d, R S W ) and the cost C ( f , R ) will be referred to as the social cost correspond ing to this fl o w-rate. Also, w e will call a solution ( f ∗ , R ∗ ) of the abo ve problem as an OPT flo w-rate for the instan ce ( G, c, d, R S W ) . Consider a feasib le flo w-rate ( f , R ) for the abov e optimizatio n problem. It can be seen that the v alue of the flow from A ⊆ S to a terminal t ∈ T is P P ∈∪ s ∈ A P s,t f P ≥ P s ∈ A R s,t . Since R t ∈ R S W the result of [14] shows that random linear netwo rk cod ing follo wed by appropria te decod ing at the terminals can recov er the sources with high proba bility . C on vers ely the result of [12, 2] shows the necess ity of the existe nce of such a flo w . 2.2 T e rminals’ Incentive s and the Dis trib uted Compr ession Game The abov e formulation for social cost minimization for the instance ( G, c, d, R S W ) disre gards the fact that the agen ts who pay fo r the cos ts incurred at t he edges and t he source s may not be coope rati ve and may ha ve incent iv es for strate gic manipula tion. In this work we conside r the scen ario where the terminals pay for the netwo rk resources they are being provid ed. The terminals are noncoope rati ve and will behav e selfishly 4 trying to minimize their o wn respecti ve costs without reg ard to the social cost, while ensuring that they can recons truct all the source s. W e ha ve the follo w ing assumptions . (i) Let ( f , R ) denote a feasible flo w rate for the instance ( G, c, d, R S W ) . The network operate s via random lin ear network coding (or some practical linea r network cod ing scheme) o ver the subgraph of G induced by the corre spondin g { z e } for e ∈ E . The terminals are ca pable of performing approp riate decod ing to recov er the sources . (ii) Each terminal t ∈ T can reques t for any speci fic set of flo ws on the paths P ∈ P t and rates R t as long as such a request allo ws reconstr uction of the sources at t . There is a m echani sm in the network by means of which this re quest is ac commodated i.e. the subgr aph ov er which r andom linear ne twork coding is performed is adjusted approp riately . In this work w e wish to characterize fl o w-rates that represen t an equilibr ium among selfish terminals who act strateg ically to minimize their own costs. F urthermor e, we shall systematically study the loss that occurs due to the mismatch between the social goals and termina l’ s selfish goals. T ow ards this end, w e now formally model the game origi nating from the selfish beha vior of the ter- minals. W e model this game as a normal formal game or strate gic game [21] , which we refer to as the Distrib uted Compr ession Game(DCG) . A normal form game, denot ed ( N , { A i } i ∈ N , { i } i ∈ N ) , consists of the set of playe rs N , the tuple of set of str ate gies A i for each player i ∈ N , and the tuple of pr efer ence r elations i for each player i ∈ N on the set A = × i ∈ N A i . For a, b ∈ A , a i b means that the player i prefers the tuple of strateg ies a to the tuple of strate gies b . In the context of Distrib uted Compr ession Game , giv en an instance ( G, c, d, R S W ) , thes e paramete rs are defined as follo ws. 2.2.1 The Distrib u ted Compress ion Game • Player s: N = T , i.e. the ter minals a re the players. This is because, as mentioned ab ov e, the terminal s are the users and the y are the ones who pay for the network resources they are bei ng provided . • Strategies : The strategy set of a player t ∈ T consi sts of tuples ( f t , R t ) where – f t is the vector of fl o ws on paths goin g to t , i.e. the v ector of v alues f P for all P ∈ P t , an d re call that R t denote s the rate vector for termina l t ; – f P ≥ 0 ∀ P ∈ P t , P P ∈ P s,t f P ≥ R s,t ∀ s ∈ S and R t ∈ R S W . Therefore , A t = ( f t , R t ) : f P ≥ 0 ∀ P ∈ P t , P P ∈ P s,t f P ≥ R s,t ∀ s ∈ S, R t ∈ R S W . (2) Note that a feasible flow-ra te ( f , R ) for the instance ( G, c, d, R S W ) is an element of the set A = × t ∈ T A t defined for the same instance . • Pref er ence Relations: T o specify the preferen ce relation of terminal t ∈ T , we need to kno w how much does she pay giv en a feasible fl o w-rate ( f , R ) i.e. what fraction s of the costs at variou s edges and sources are being paid by t ? T o this end, we need market models, i.e. mechanisms for splitting the costs among va rious terminals. 5 – E dge Costs: At a flow f , the cost of an edge e ∈ E is c e ( z e ) . It is split among the terminals t ∈ T , each paying a fraction of this cost. Let us say that the fractio n paid by the player t is Ψ e,t ( x e ) i.e. th e player t pays c e ( z e )Ψ e,t ( x e ) for the edge e where x e denote s the vec tor ( x e,t 1 , x e,t 2 , . . . , x e,t N T ) . Of course, P t ∈ T Ψ e,t ( x e ) = 1 to ensure that the total cost is borne by someone or the other . The total cost borne by t across all the edges is P e ∈ E c e ( z e )Ψ e,t ( x e ) , denote d C ( t ) E ( f ) . – Sour ce Costs: At a rate R , th e cost for the so urce s is d s ( y s ) , whi ch is split among the t erminals t ∈ T , such that t pays a fraction Φ s,t ( ρ s ) i.e. the player t pays d s ( y s )Φ s,t ( ρ s ) for the source s . O f course, P t ∈ T Φ s,t ( ρ s ) = 1 . The refore, the total cost borne by t for all sources, denoted C ( t ) S ( R ) , is P s ∈ S d s ( y s )Φ s,t ( ρ s ) . Thus, w ith the edge-co st-split ting mecha nism Ψ and the sour ce-cost-spl itting m echa nism Φ , the total cost incurr ed by the player t ∈ T at flow-ra te ( f , R ) denoted C ( t ) ( f , R ) is C ( t ) ( f , R ) = C ( t ) E ( f ) + C ( t ) S ( R ) = X e ∈ E c e ( z e )Ψ e,t ( x e ) + X s ∈ S d s ( y s )Φ s,t ( ρ s ) . No w , each terminal t would l ike to minimize i ts own cost i.e. the fu nction C ( t ) ( f , R ) and therefore t he prefere nce relations { t } are as follo ws. Fo r two flow-ra tes ( f , R ) ∈ A and ( ˜ f , ˜ R ) ∈ A , ( f , R ) t ( ˜ f , ˜ R ) if and only if C ( t ) ( f , R ) ≤ C ( t ) ( ˜ f , ˜ R ) . Also, ( f , R ) ≻ t ( ˜ f , ˜ R ) iff C ( t ) ( f , R ) < C ( t ) ( ˜ f , ˜ R ) . Note that f or s pecifyin g a Distribu ted Compress ion Game, in addition to the parameters G , c, d and R S W we a lso need the cost-sp litting mechanisms Ψ and Φ . W e will call ( G, c, d, R S W , Ψ , Φ) as an i nstance of the Distrib uted Compression Game. 2.2.2 Solution Concepts f or the Distrib uted Compressio n G ame W e no w outline the possible solutio n concepts in our scenari o. These are essen tially dictated by the lev el of sophistica tion of the terminals. Sophisticat ion refers to the amount of information and computation al resour ces av ailable to a terminal. In this work we shall work w ith two diff erent solution concepts that we no w discuss . a) Nash Equilibrium. T he solution concept of Nash equlib rium r equires the complete informatio n s etting and req uires each termin al to co mpute her be st respon se to an y gi ven tuple of strate gies of the othe r players. For notational simplicit y , let f − t be the vec tor of flows on paths not going to terminal t i.e. the vecto r of v alues f P for a ll P ∈ P − P t , th erefore f = ( f − t , f t ) . Similarly , R − t is the v ector of rat es corr espond ing to all players other than t , therefor e R = ( R − t , R t ) . In our setting , the best response problem of a terminal t is to minimize her cost fun ction C ( t ) ( f − t , f t , R − t , R t ) ov er ( f t , R t ) ∈ A t gi ven any ( f − t , R − t ) . Therefore a Nash flow-ra te is defined as follo ws. Definition 1 (Nash flow-rate) A flow-rate ( f , R ) feasible for the instan ce ( G, c, d, R S W ) is at Nash equi- libriu m, or is a Nash flow-ra te for instance ( G, c, d, R S W , Ψ , Φ) , if ∀ t ∈ T , C ( t ) ( f , R ) ≤ C ( t ) ( f − t , ˜ f t , R − t , ˜ R t ) ∀ ( ˜ f t , ˜ R t ) ∈ A t . W e note th at computi ng the best respon se w ill in g eneral requ ire a gi ven termin al to kno w flow as signments on all possible paths and rate vectors for all the terminals . More ov er , con vexity of the objecti ve function in N I F − C P (i.e. social cost C ( f , R ) ) does not imply con ve xity of C ( t ) ( f − t , f t , R − t , R t ) in the vari- ables ( f t , R t ) ∈ A t in general. Therefo re the computatio nal requi rements at the terminals may be larg e. 6 Consequ ently Nash equilib rium does not seem to be an appropriat e solution concept for the D istrib uted Compressio n Game when vie wed through the algorith mic lens. b) W ar dr op Equilibri um. F rom a practica l standpoint , a terminal may only ha ve parti al knowled ge of the system and may be computational ly constrained . A solut ion conc ept more appro priate under such situati ons is that of local Nash equilib rium or W ardrop equilibriu m that is w idely adopted in selfish routin g and transportat ion literatu re [25 , 3, 9 ]. W e note that this solution concep t has also been utilized in [5] and is furth er justified in [1 1]. W e first pre sent the precise definition of the W ardrop equ ilibrium in our case and then pro vide an intuiti ve justificati on. T oward s this end, we need to define the margin al cost of a path. Definition 2 (Marginal Cost of a Path) F or a P ∈ P t its mar ginal cost is C P ( f ) = X e ∈ P c e ( z e )Ψ e,t ( x e ) x e,t . Therefore , for the terminal t , the total cost for the edges, C ( t ) E , can be equi valen tly written as C ( t ) E ( f ) = X P ∈ P t C P ( f ) f P . Definition 3 (W ardrop flow-rate) A flow-rate ( f , R ) feasible for the instance ( G, c, d, R S W ) is at local Nash equilibrium, or is a W ar dr op flow-rat e for instance ( G, c, d, R S W , Ψ , Φ) , if it satisfies the following condit ions. 1. ∀ t ∈ T , ∀ s ∈ S , we have X P ∈ P s,t f P = R s,t . 2. ∀ t ∈ T , we have X s ∈ S R s,t = H ( X S ) . 3. ∀ t ∈ T , ∀ s ∈ S , P , Q ∈ P s,t with f P > 0 , C P ( f ) ≤ C Q ( f ) . 4. F or t ∈ T , let j ∈ S partic ipates in all tight rat e inequa lities in volvin g i ∈ S (i.e. if A ⊆ S , such tha t i ∈ A and P l ∈ A R l,t = H ( X A | X − A ) 1 , then j ∈ A ) and let P ∈ P i,t , Q ∈ P j,t with f P > 0 then we have C P ( f ) + ∂ C ( t ) S ( R ) ∂ R i,t ≤ C Q ( f ) + ∂ C ( t ) S ( R ) ∂ R j,t . Intuiti vely , cond itions (1) and (2) require that each terminal request s as little rate and flow as possib le. Conditio n (3) ensures that an infitesimally small change in flow allo cations from path P (where f P > 0 ) to path Q where P , Q ∈ P s,t , will increas e the sum cost along paths in P t . No w , consider an infitesimally sma ll chang e in fl o w allocation from P ∈ P i,t (where f P > 0 ) to Q ∈ P j,t . This also requires a correspo nding chang e in the rates reque sted from sources i and j by terminal t . Under certain constraints on the source j , Conditio n (4) ensures that the overal l effect of this change will serve to increase terminal t ’ s cost. The 1 W e use H ( X A | X − A ) and H ( X A | X A c ) interchangeably i n the text to denote the j oint entropy of the sources in set A giv en the remaining sources. 7 condit ions on the source j are well-moti v ated in light of the characteri zation of Nash flow-rate in section 5 in the case when the best respon se problem of e very termin al is con vex. W e remark that a Nash fl o w-rate may not always be a W ardrop fl o w-rate and vice versa. When sources are indepe ndent, condit ion (2) implies that R s,t = H ( X s ) for all s ∈ S, t ∈ T and it is not required to check the condition (4). Also we can rec ov er condi tion (3) by sett ing i = j in condit ion (4). They are s tated separa tely for the sake of clarit y . As we discuss ed earlier , the solution concep t based on W ardrop equ ilibrium seems more suita ble to our scenar io and conseque ntly we define the price of anarc hy [15, 22, 25] in terms of W ardrop flo w-rate inst ead of Nash flow-r ate. Definition 4 Price of Anar chy(PO A) : Let C be a class of edge cost functio ns, D be a class of sour ce cost funct ions, G be a class of networ ks/gr aphs, Ψ be an edg e cost splitting m ech anism, Φ be a sour ce cost splitting mechanism, and M be a set of Slepian- W olf polytop es. W e will r efer to ( G , C , D , Ψ , Φ , M ) as a scenario . The price of anar chy for the scena rio ( G , C , D , Ψ , Φ , M ) , denote d ρ ( G , C , D , Ψ , Φ , M ) , is define d as maximum over all instan ces ( G, c, d, R S W ) with G ∈ G , c ∈ C , d ∈ D , R S W ∈ M , of the ratio between the cost of worst possible W ar dr op flow-rate for the instan ce ( G, c, d, R S W , Ψ , Φ) and the cost of OPT flow-r ate (i.e. the socially optimal cost) for the instanc e ( G, c, d, R S W ) . That is, ρ ( G , C , D , Ψ , Φ , M ) = max G ∈ G , c ∈ C ,d ∈ D , R S W ∈ M max ( f , R ) is a W ar dr op flow-rat e for ( G, c , d, R S W , Ψ , Φ) C ( f , R ) C O P T ( G, c, d, R S W ) , wher e C O P T ( G, c, d, R S W ) r efers to the optimal cost of N I F − C P for the insta nce ( G, c, d, R S W ) . Let us denote the set of Slepian-W olf polytopes corre spondin g to the case w here there are no sourc e correla tions (i.e. H ( X A | X − A ) = H ( X A ) for all A ∈ S ) by M ind (subsc ript ind denotes - indepen dent ) and the set of Slepian-W olf polytopes corres pondin g to the case where sources are correlate d (i.e. there exi sts A ⊆ S with H ( X A | X − A ) < H ( X A ) ) by M c . Also, we use G all to denote the class of all graphs where e very t ∈ T is connected to ev ery s ∈ S , and G dsw (subsc ript dsw de notes - dir ect Slepian- W olf ) to denote the class of complete bipartite graphs between the set of sources and the set of terminals. Note that G dsw corres ponds to the case where e very terminals is directly connecte d to ev ery sourc e b y an edge and no network coding is required. A questio n we will be most conc erned with in this wor k is whether ρ ( G , C , D , Ψ , Φ , M c ) > ρ ( G , C , D , Ψ , Φ , M ind ) , and in particula r whether ρ ( G , C , D , Ψ , Φ , M c ) > 1 but ρ ( G , C , D , Ψ , Φ , M ind ) = 1 for meaning ful classes of cost functio ns C , D and reasonabl e splittin g mechanis ms Ψ and Φ i.e. does correlation induce anarchy? 3 Some Prop erties of Slepian-W olf Polytope In this section, we establish two properties of S lepian- W olf polyto pe that will be useful in the latter sections. Lemma 5 Let R t ∈ R S W i.e. P l ∈ A R l,t ≥ H ( X A | X − A ) for all A ⊆ S . If S 1 , S 2 ⊆ S satisfy X l ∈ S 1 R l,t = H ( X S 1 | X − S 1 ) and X l ∈ S 2 R l,t = H ( X S 2 | X − S 2 ) 8 then we have X l ∈ S 1 ∩ S 2 R l,t = H ( X S 1 ∩ S 2 | X − ( S 1 ∩ S 2 ) ) and X l ∈ S 1 ∪ S 2 R l,t = H ( X S 1 ∪ S 2 | X − ( S 1 ∪ S 2 ) ) . Pro of: W e hav e, X l ∈ S 1 ∩ S 2 R l,t + X l ∈ S 1 ∪ S 2 R l,t = X l ∈ S 1 R l,t + X l ∈ S 2 R l,t = H ( X S 1 | X − S 1 ) + H ( X S 2 | X − S 2 ) ≤ H ( X S 1 ∩ S 2 | X − ( S 1 ∩ S 2 ) ) + H ( X S 1 ∪ S 2 | X − ( S 1 ∪ S 2 ) ) where in the second step we ha ve used the supermodula rity prop erty of conditio nal entro py . Now we are also gi ven tha t X l ∈ S 1 ∩ S 2 R l,t ≥ H ( X S 1 ∩ S 2 | X − ( S 1 ∩ S 2 ) ) and X l ∈ S 1 ∪ S 2 R l,t ≥ H ( X S 1 ∪ S 2 | X − ( S 1 ∪ S 2 ) ) . Therefore we can conclu de that X l ∈ S 1 ∪ S 2 R l,t = H ( X S 1 ∪ S 2 | X − ( S 1 ∪ S 2 ) ) and X l ∈ S 1 ∩ S 2 R l,t = H ( X S 1 ∩ S 2 | X − ( S 1 ∩ S 2 ) ) . Theor em 6 Consider a vector ( R 1 , R 2 , . . . , R n ) suc h that X i ∈ A R i ≥ H ( X A | X A c ) , for all A ⊂ { 1 , 2 , . . . , n } , and n X i =1 R i > H ( X 1 , X 2 , . . . , X n ) . Then ther e exists anothe r vector ( R ′ 1 , R ′ 2 , . . . , R ′ n ) suc h that R ′ i ≤ R i for all i = 1 , 2 , . . . n and X i ∈ A R ′ i ≥ H ( X A | X A c ) , for all A ⊂ { 1 , 2 , . . . , n } , and n X i =1 R ′ i = H ( X 1 , X 2 , . . . , X n ) . Pr oof . W e claim that there exists a R j ∗ ∈ { R 1 , R 2 , . . . , R n } such that all inequa lities in which R j ∗ partici - pates are loose . The proof of this claim follo ws. 9 Suppose that the above claim is not true. Then for all R i where i ∈ { 1 , 2 , . . . , n } , there exis ts at least one subset S i ⊂ { 1 , 2 , . . . , n } such that, X k ∈ S i R k = H ( X S i | X S c i ) . i.e. each R i partici pates in at least one inequa lity that is tight. No w by appl ying L emma 5 on the sets S 1 , S 2 , . . . , S n , since S 1 ∪ S 2 · · · ∪ S n = { 1 , 2 , . . . , n } , we get P n i =1 R i = P i ∈ S 1 ∪ S 2 ···∪ S n R i = H ( X S 1 ∪ S 2 ···∪ S n | X − ( S 1 ∪ S 2 ···∪ S n ) ) = H ( X 1 , X 2 , . . . , X n ) , which is a contra diction. The abov e arg ument sho w s that there exi sts some j ∗ such that all inequalit ies in which R j ∗ partici pates are loose. Therefore we can reduce R j ∗ to a new value R r ed j ∗ until one of the inequalities in whic h it partici pates is tight. If the sum-rate constraint is met with equality then w e can set R ′ j ∗ = R r ed j ∗ otherwis e we can recursi vely apply the above procedure to arriv e at a new vecto r that is component-wise smaller that the origina l vec tor ( R 1 , R 2 , . . . , R n ) . 4 Characterizing the Optimal Flows and Rates In this section , we in vestigate the properties of an OPT flow-rate via L agrang ian duality theory [6]. Since the optimiza tion problem (NIF-CP) is con ve x and the constraints are such that the stro ng dualit y hold s, the Karu sh-K uhn-T uck er(KKT) conditi ons exactly charact erize optimality [6]. Therefore, w e start out by writing the Lagrang ian dual of NIF-CP , L = X e ∈ E c e ( z e ) + X s ∈ S d s ( y s ) − X P ∈ P µ P f P + X s ∈ S X t ∈ T λ s,t ( R s,t − X P ∈ P s,t f P ) + X t ∈ T X A ⊆ S ν A,t H ( X A | X A c ) − X i ∈ A R i,t ! where µ P ≥ 0 , λ s,t ≥ 0 and ν A,t ≥ 0 are the dual var iables (i.e. Lagrange multipliers). For notational simplicit y , let us denote the partial deri v ati ve of z e with respec t to x e,t , ∂ z e ∂ x e,t by z ′ e,t . Note that the partial deri vati ve of x e,t w .r .t. to f P is 1 for a P ∈ P t . Similarly , we denote the partial deri va ti ve of y s with respec t to R s,t , ∂ y s ∂ R s,t by y ′ s,t . T he KKT conditions are then giv en by the follo wing equation s that hold ∀ s ∈ S, t ∈ T , ∂ L ∂ f P = X e ∈ P c ′ e ( z e ) z ′ e,t ( x e ) − µ P − λ s,t = 0 , ∀ P ∈ P s,t , and (3) ∂ L ∂ R s,t = d ′ s ( y s ) y ′ s,t ( ρ s ) + λ s,t − X A ⊆ S : s ∈ A ν A,t = 0 (4) along with the feasibilit y of the fl o w-rate ( f , R ) and the complementary slackne ss conditio ns, µ P f P = 0 for all P ∈ P , λ s,t ( R s,t − P P ∈ P s,t f P ) = 0 for all s ∈ S, t ∈ T , and ν A,t H ( X A | X A c ) − P i ∈ A R i,t = 0 for all A ⊆ S, t ∈ T . Let us no w interpret the K KT conditio ns at the OP T flow-rat e ( f ∗ , R ∗ ) . Supp ose that f ∗ P > 0 for P ∈ P s,t . Then due to complement ary slackne ss, we hav e µ ∗ P = 0 and cons equentl y from equat ion (3) we get P e ∈ P c ′ e ( z ∗ e ) z ′ e,t ( x ∗ e ) = λ ∗ s,t i.e. if there exi sts another path Q ∈ P s,t such that f ∗ Q > 0 then P e ∈ P c ′ e ( z ∗ e ) z ′ e,t ( x ∗ e ) = P e ∈ Q c ′ e ( z ∗ e ) z ′ e,t ( x ∗ e ) . 10 No w if we interpret the quant ity P e ∈ P c ′ e ( z e ) z ′ e,t ( x e ) as the dif fer ential cost of the path P assoc iated with the flow-rate ( f , R ) then this conditio n implies that the diffe rential cost of all the paths going from the same source to the same terminal with positi ve flows at OPT is the same. It is quite intuiti ve for if it were not true the objecti ve functio n could be further decreased by moving some flow from a higher diff erential cost path to a lower dif ferential cost one without violating feasibil ity condition s, and of course this should not b e p ossible at the optimum. Similarly , the dif ferential cost a long a path with zero flo w at OPT m ust h av e higher dif ferential cost and indeed this can be obtained as abo ve by further noting that the dual va riables µ P ’ s are non-ne gati ve. W e note this property of the OP T flo w -rate in the follo wing lemma. Lemma 7 Let ( f ∗ , R ∗ ) be an OPT flow-rate for the instance ( G, c, d, R S W ) . Then, ∀ t ∈ T , ∀ s ∈ S , P , Q ∈ P s,t with f P > 0 we have X e ∈ P c ′ e ( z ∗ e ) z ′ e,t ( x ∗ e ) ≤ X e ∈ Q c ′ e ( z ∗ e ) z ′ e,t ( x ∗ e ) . The abov e lemma pro vides a simple and intuiti ve characteriz ation of how the flow allocati ons on var - ious paths of same type (that is originat ing at same source and ending at the same terminal) behav e at the optimum solution. A lthoug h such a simple and intuiti ve charact erizatio n of the behav ior of joint fl o w and rate allocati ons at optimum is not immediately clear , we can indeed obtain three other simple and intuiti ve condit ions that together with L emma 7, are equi valen t to the KKT condi tions. W e establish this importan t charac terizatio n in the Theorem 11. First, we will sho w in the next three lemmas that these condition s are necess ary for optimality . Lemma 8 Let ( f , R ) be an O PT flow-rate for the instanc e ( G, c, d, R S W ) . F or t ∈ T , suppose that ther e e xist i, j ∈ S that satisfy the followin g pr operty . If A ⊆ S , suc h that i ∈ A and P l ∈ A R l,t = H ( X A | X − A ) , then j ∈ A . F or such i and j let P ∈ P i,t , Q ∈ P j,t with f P > 0 . Then X e ∈ P c ′ e ( z e ) z ′ e,t ( x e ) + d ′ i ( y i ) y ′ i,t ( ρ i ) ≤ X e ∈ Q c ′ e ( z e ) z ′ e,t ( x e ) + d ′ j ( y j ) y ′ j,t ( ρ j ) . Pro of: S ince ( f , R ) is an OPT flow-rate, it satisfies the KKT conditi ons for some suitable choice of dual v ariable s λ i,t ≥ 0 , µ P ≥ 0 , ν A,t ≥ 0 . Now , we are giv en that j ∈ A for all A ⊆ S such that i ∈ A and P l ∈ A R l,t = H ( X A | X − A ) , so if there is an A ⊆ S such that i ∈ A but j / ∈ A then P l ∈ A R l,t > H ( X A | X − A ) and therefore by complementary slackness we get ν A,t = 0 . F urther , from Equation 4, we ha ve d ′ i ( y i ) y ′ i,t ( ρ i ) + λ i,t = X A ⊆ S : i ∈ A ν A,t = X A ⊆ S : i ∈ A,j ∈ A ν A,t (since X A ⊆ S : i ∈ A,j / ∈ A ν A,t = 0 ) and d ′ j ( y j ) y ′ j,t ( ρ j ) + λ j,t = X A ⊆ S : j ∈ A ν A,t = X A ⊆ S : j ∈ A , i ∈ A ν A,t + X A ⊆ S : j ∈ A , i / ∈ A ν A,t ≥ X A ⊆ S : j ∈ A , i ∈ A ν A,t = d ′ i ( y i ) y ′ i,t ( ρ i ) + λ i,t . 11 Therefore we get, d ′ i ( y i ) y ′ i,t ( ρ i ) + λ i,t ≤ d ′ j ( y j ) y ′ j,t ( ρ j ) + λ j,t . Furthermor e, we are gi ven that f P > 0 which, using E quation 3 and complementary slacknes s condit ion f P µ P = 0 , implies that λ i,t = P e ∈ P c ′ e ( z e ) z ′ e,t ( x e ) and since µ Q ≥ 0 w e hav e P e ∈ Q c ′ e ( z e ) z ′ e,t ( x e ) ≥ λ j,t . Therefore , d ′ i ( y i ) y ′ i,t ( ρ i ) + X e ∈ P c ′ e ( z e ) z ′ e,t ( x e ) ≤ d ′ j ( y j ) y ′ j,t ( ρ j ) + X e ∈ Q c ′ e ( z e ) z ′ e,t ( x e ) . This concl udes the proof . Lemma 9 Let ( f , R ) be an OP T flow-rate for the instance ( G, c, d, R S W ) wher ein the functions c e ’ s and d s ’ s ar e all strictly con ve x, then ∀ t ∈ T , ∀ s ∈ S , we have P P ∈ P s,t f P = R s,t . Pro of: Let P P ∈ P s,t f P > R s,t then the re is a P ∈ P s,t with f P > 0 . Define a new fea sible flow ˜ f such that ˜ f Q = f Q if Q 6 = P and ˜ f P = f P − δ for some 0 < δ < min { f P , P P ∈ P s,t f P − R s,t } . Then, X e ∈ E c e ( ˜ z e ) = X e ∈ P c e ( ˜ z e ) + X e / ∈ P c e ( z e ) = X e ∈ E c e ( z e ) + X e ∈ P ( c e ( ˜ z e ) − c e ( z e )) Now , since the functions c e is non-decr easing as well as z e is non-d ecr easing in each co-or dinate, we ge t c e ( ˜ z e ) − c e ( z e ) ≤ 0 for all e ∈ P . Therefore, X e ∈ E c e ( ˜ z e ) ≤ X e ∈ E c e ( z e ) = ⇒ C ( ˜ f , R ) = X e ∈ E c e ( ˜ z e ) + X s ∈ S d s ( y s ) ≤ X e ∈ E c e ( z e ) + X s ∈ S d s ( y s ) = C ( f , R ) which is a contrad iction because ( f , R ) , due to strict con vex ity of the function C , is the unique OPT flow- rate. Lemma 10 Let ( f , R ) be an OPT flow-rate for the instan ce ( G, c, d, R S W ) wher ein the functions c e ’ s and d s ’ s ar e all strictly con ve x, then ∀ t ∈ T , we have P s ∈ S R s,t = H ( X S ) . Pro of: As R is feasible, ∀ t ∈ T , R t ∈ R S W and therefor e, P s ∈ S R s,t ≥ H ( X S ) . Sup pose P s ∈ S R s,t > H ( X S ) for some t ∈ T , then from Theorem 6 th ere exi st an s ∈ S , such that a ll (Slepian-W olf) inequalities in which R s,t partici pates are loose . T herefo re, we can decrease this rate R s,t by a positi ve amount r i.e. to ˜ R s,t = R s,t − r , without viola ting feasibili ty . This means that w e can define a feasible rate ˜ R such that ˜ R i,t = R i,t if i 6 = s and ˜ R s,t = R s,t − r for some r > 0 . Now , X i ∈ S d i ( ˜ y i ) = X i ∈ S d i ( y i ) + ( d s ( ˜ y s ) − d s ( y s )) 12 Now , since d s is non-decr easing as well as y s is non-de cr easing in eac h co-or dinate, we get d s ( ˜ y s ) ≤ d s ( y s ) . Therefore , X i ∈ S d i ( ˜ y i ) ≤ X i ∈ S d i ( y i ) = ⇒ C ( f , ˜ R ) = X e ∈ E c e ( z e ) + X s ∈ S d s ( ˜ y s ) ≤ X e ∈ E c e ( z e ) + X s ∈ S d s ( y s ) = C ( f , R ) which is a contrad iction because ( f , R ) , due to strict con vex ity of the function C , is the unique OPT flow- rate. Theor em 11 A feasible flow-ra te ( f , R ) for the instance ( G, c, d, R S W ) , w hich satisfies the following four condit ions is an OPT flow-rate for the instance ( G, c, d, R S W ) . Also, ther e is always an OPT flow-rate that satisfi es these four condition s. Furth er , when the edge cost function s c e for all e ∈ E and the sour ce cost functi ons d s for all s ∈ S ar e strictly con vex, that is when the optimization pr oblem (NIF-CP) is strictly con ve x, these condit ions ar e also necessary for optimality . 1. ∀ t ∈ T , ∀ s ∈ S , we have X P ∈ P s,t f P = R s,t . 2. ∀ t ∈ T , we have X s ∈ S R s,t = H ( X S ) . 3. ∀ t ∈ T , ∀ s ∈ S , P , Q ∈ P s,t with f P > 0 , X e ∈ P c ′ e ( z e ) z ′ e,t ( x e ) ≤ X e ∈ Q c ′ e ( z e ) z ′ e,t ( x e ) . 4. F or t ∈ T , suppose that ther e ex ist i, j ∈ S that satisfy the following pr operty . If A ⊆ S , suc h that i ∈ A and P l ∈ A R l,t = H ( X A | X − A ) , then j ∈ A . F or such i and j let P ∈ P i,t , Q ∈ P j,t with f P > 0 . Then X e ∈ P c ′ e ( z e ) z ′ e,t ( x e ) + d ′ i ( y i ) y ′ i,t ( ρ i ) ≤ X e ∈ Q c ′ e ( z e ) z ′ e,t ( x e ) + d ′ j ( y j ) y ′ j,t ( ρ j ) . Pro of: W e prov e that the abo ve four condi tions imply optimal ity of ( f , R ) . Our assumpti ons guaran tee that the optimizatio n problem ( NIF-CP ) for the instan ce ( G, c, d, R S W ) is con vex and since all the feasibility constr aints are linear , strong duali ty holds [6]. This implies that the KK T cond itions are necess ary and suf fi cient for optimality . W e sho w that a feasible flo w-rate ( f , R ) with the ab ov e fou r properti es satisfies the KKT conditi ons for the instance ( G, c, d, R S W ) for a suitabl e choice of the dual v ariables giv en belo w . Choosing λ i,t ’ s: λ i,t := min P ∈ P i,t X e ∈ P c ′ e ( z e ) z ′ e,t ( x e ) . 13 Note that, using Condition 3 , for i ∈ S , if there exis t a P i ∈ P i,t such that f P i > 0 then we ha ve λ i,t = X e ∈ P i c ′ e ( z e ) z ′ e,t ( x e ) . Choosing µ P ’ s: For P ∈ P i,t tak e µ P := X e ∈ P c ′ e ( z e ) z ′ e,t ( x e ) − λ i,t . Choosing ν A,t ’ s: L et h i,t := d ′ i ( y i ) y ′ i,t ( ρ i ) + λ i,t . Let π denote a permutation such that 0 ≤ h π (1) ,t ≤ h π (2) ,t ≤ . . . h π ( N S ) ,t . Now tak e ν A,t = h π (1) ,t if A = { π (1) , π (2) , . . . , π ( N S ) } h π ( i ) ,t − h π ( i − 1) ,t if A = { π ( i ) , . . . , π ( N S ) } and 2 ≤ i ≤ N S 0 otherwise . No w , with the abo ve choi ce of dual v ariable s we will check all the KKT conditi ons one by one. Dual Feas ibility: • λ i,t ≥ 0 as c e and z e are non-de creasing functio ns i.e. c ′ e ( z e ) ≥ 0 and z ′ e,t ( x e ) ≥ 0 . • µ P ≥ 0 by the definition becaus e λ i,t ≤ P e ∈ P c ′ e ( z e ) z ′ e,t ( x e ) ∀ P ∈ P i,t . • ν A,t ≥ 0 by definiti on. KKT Conditions as per equation 3: ∂ L ∂ f P = X e ∈ P c ′ e ( z e ) z ′ e,t ( x e ) − λ i,t − µ P = X e ∈ P c ′ e ( z e ) z ′ e,t ( x e ) − λ i,t − X e ∈ P c ′ e ( z e ) z ′ e,t ( x e ) − λ i,t ! = 0 . KKT Conditions as per equation 4: ∂ L ∂ R π ( i ) ,t = d ′ π ( i ) ( y π ( i ) ) y ′ π ( i ) ,t ( ρ π ( i ) ) + λ π ( i ) ,t − X A ⊆ S : π ( i ) ∈ A ν A,t = h π ( i ) ,t − X A ⊆ S : π ( i ) ∈ A ν A,t = h π ( i ) ,t − X j ∈{ 1 , 2 ,...,i } ν { π ( j ) ,π ( j +1) ,...,π ( N S ) } ,t = h π ( i ) ,t − h π (1) ,t + ( h π (2) ,t − h π (1) ,t ) +( h π (3) ,t − h π (2) ,t ) + · · · + ( h π ( i ) ,t − h π ( i − 1) ,t ) = h π ( i ) ,t − h π ( i ) ,t = 0 . Complementary Slackness Conditions: 14 • µ P f P = 0 for all P ∈ P . Let P ∈ P i,t and f P > 0 then using Condition 3 and definition of λ i,t we get X e ∈ P c ′ e ( z e ) z ′ e,t ( x e ) = λ i,t and therefo re, µ P = X e ∈ P c ′ e ( z e ) z ′ e,t ( x e ) − λ i,t = 0 . • λ s,t ( R s,t − P P ∈ P s,t f P ) = 0 for all s ∈ S, t ∈ T . This follo w s from the Condition 1 . • ν A,t H ( X A | X A c ) − P i ∈ A R i,t = 0 for all A ⊆ S, t ∈ T . Note that ν A,t = 0 exc ept for A = { π ( i ) , π ( i + 1) , . . . , π ( N S ) } , fo r i = 1 , 2 , . . . , N S . T herefor e the only conditio n that needs to be check ed is that if P N S j = i R π ( j ) ,t > H ( X π ( i ) , X π ( i +1) , . . . , X π ( N S ) | X π ( i − 1) , . . . , X π (1) ) , then h π ( i ) ,t − h π ( i − 1) ,t = 0 . T ow ards this end let j ∈ { π ( i ) , π ( i + 1) , . . . , π ( N S ) } , and let A j be the minimum cardinality set such that j ∈ A j and P l ∈ A j R l,t = H ( X A j | X − A j ) i.e. A j = arg min A ⊆ S : j ∈ A , P l ∈ A R l,t = H ( X A | X − A ) | A | . Such a set A j alw ays exis ts because from Condition 2 w e hav e P N S l =1 R l,t = H ( X 1 , . . . , X N S ) and therefore the set A ⊆ S : j ∈ A, P l ∈ A R l,t = H ( X A | X − A ) is not empty . W e claim that the re e xists a j ∗ ∈ { π ( i ) , π ( i + 1) , . . . , π ( N S ) } such that A j ∗ ∩ { π (1) , π (2) , . . . , π ( i − 1) } is not empty . If this is not true then clearly we hav e ∪ π ( N S ) j = π ( i ) A j = { π ( i ) , π ( i + 1) , . . . , π ( N S ) } and using the supermod ularity prope rty of conditio nal entrop y (ref. Lemma 5 ), we obtain π ( N S ) X j = π ( i ) R j,t = H ( X π ( i ) , X π ( i +1) , . . . , X π ( N S ) | X π ( i − 1) , . . . , X π (1) ) , which is a contradic tion, therefo re we must hav e such a j ∗ ∈ { π ( i ) , π ( i + 1) , . . . , π ( N S ) } such that A j ∗ ∩ { π (1) , π (2) , . . . , π ( i − 1) } is not empty . Next, we sho w that there ex ists a source k ∈ { π (1) , π (2) , . . . , π ( i − 1) } such that if j ∗ ∈ A and P l ∈ A R l,t = H ( X A | X − A ) , then k ∈ A . T owa rds this end suppose that there exi st subsets S 1 and S 2 of S such that j ∗ ∈ S 1 ∩ S 2 and P l ∈ S 1 R l,t = H ( X S 1 | X − S 1 ) and P l ∈ S 2 R l,t = H ( X S 2 | X − S 2 ) , then using the supermo dularity property of condition al entrop y we can sho w that rate inequality in v olving S 1 ∩ S 2 is also tight ( Lemma 5 ) i.e. P l ∈ S 1 ∩ S 2 R l,t = H ( X S 1 ∩ S 2 | X − ( S 1 ∩ S 2 ) ) . This implie s that A j ∗ , being of mini mum cardin ality , is the inters ection of all sets that ha ve j ∗ as a member on which the rate ineq uality is tight i.e. A j ∗ = \ A ⊆ S { A : j ∗ ∈ A, X l ∈ A R l,t = H ( X A | X − A ) } . Moreo ver note that A j ∗ is not a singleton set since A j ∗ ∩ { π (1) , π (2) , . . . , π ( i − 1) } 6 = φ . Therefore there exi sts a k ∈ A j ∗ such that k 6 = j ∗ . By our abov e argu ments this implies that if A ⊆ S is such that j ∗ ∈ A and P l ∈ A R l,t = H ( X A | X − A ) then k ∈ A . Clearly , R j ∗ ,t > H ( X j ∗ | X − j ∗ ) as k does not partic ipate in this rate inequ ality . Therefore , R j ∗ ,t > 0 which implies that there ex ists a P ∈ P j ∗ ,t with f P > 0 , therefor e using C ondition 3 and the definitio n of 15 λ j ∗ ,t we hav e P e ∈ P c ′ e ( z e ) z ′ e,t ( x e ) = λ j ∗ ,t . Also, by the definition of λ k ,t there is a Q ∈ P k ,t such that P e ∈ Q c ′ e ( z e ) z ′ e,t ( x e ) = λ k ,t . No w using Condition 4 , we get X e ∈ P c ′ e ( z e ) z ′ e,t ( x e ) + d ′ j ∗ ( y j ∗ ) y ′ j ∗ ,t ( ρ j ∗ ) ≤ X e ∈ Q c ′ e ( z e ) z ′ e,t ( x e ) + d ′ k ( y k ) y ′ k ,t ( ρ k ) ∀ Q ∈ P k ,t which implies that λ j ∗ ,t + d ′ j ∗ ( y j ∗ ) y ′ j ∗ ,t ( ρ j ∗ ) ≤ λ k ,t + d ′ k ( y k ) y ′ k ,t ( ρ k ) and therefore we get h j ∗ ,t ≤ h k ,t . Now note that k ∈ { π (1) , π (2) , . . . , π ( i − 1) } w hile j ∗ ∈ { π ( i ) , . . . , π ( N S ) } . This implies in turn that h π ( i ) ,t ≤ h j ∗ ,t ≤ h k ,t . But, we kno w that h k ,t ≤ h π ( i − 1) ,t i.e. h π ( i ) ,t − h π ( i − 1) ,t ≤ 0 b ut we already hav e h π ( i ) ,t − h π ( i − 1) ,t ≥ 0 and hence h π ( i ) ,t − h π ( i − 1) ,t = 0 . This es tablishe s that the f our cond itions are suf fi cient for o ptimality . Furthe r , as per Lemmas 7, 8, 9, 10, under strict con vexity conditio ns, these condition s are necessary too. Cor ollary 12 If the sour ces ar e independ ent (i.e. R S W ∈ M ind ), ther e is a feasible flow-rate for instance ( G, c, d, R S W ) that is an OPT flow-ra te for both the instances ( G, c, d, R S W ) and ( G, ˜ c, ˜ d, R S W ) , wher e ˜ c e ( x ) = αc e ( x ) for constant α > 0 , and ˜ d s is any con vex, differ entiab le, positiv e and non-decr easing functi on. Further , this OP T flow-r ate satisfies the four conditions in Theor em 11 for both the instan ces ( G, c, d, R S W ) and ( G, ˜ c , ˜ d, R S W ) . Pro of: The idea is that w hen the sources are independe nt, Condition (2) in Theore m 11 implies that R s,t = H ( X s ) for all s ∈ S, t ∈ T , and therefo re, there is no pair ( i, j ) such that j par ticipate s in all tight rate inequ alities in v olving i and conseq uently it is not require d to check Condition (4). For the sake of complete ness the proof follo ws. Let ( f , R ) be an OPT flow-rate for ( G, c, d, R S W ) satisfyi ng the four conditio ns in Theorem 11. Note that such an OP T flo w-rate alwa ys exists as per Theorem 11. Since the sour ces are indep endent the rate inequa lities constra ints becomes X i ∈ A R i,t ≥ H ( X A ) for all A ⊆ S, t ∈ T . Therefore , using Condition (2) in Theorem 11, we obtain R s,t = H ( X s ) for all s ∈ S, t ∈ T . No w we will sho w that ( f , R ) is also an O PT flow-rate for the instance ( G, ˜ c, ˜ d, R S W ) by sho wing that it satisfies the four condition s in T heorem 11 for instance ( G, ˜ c, ˜ d, R S W ) . Note that Conditions (1) and (2) are easily satisfied by ( f , R ) as the y do not depend on particular cost functions. F urther , X e ∈ P ˜ c ′ e ( z e ) z ′ e,t ( x e ) = α X e ∈ P c ′ e ( z e ) z ′ e,t ( x e ) , therefo re conditi on X e ∈ P ˜ c ′ e ( z e ) z ′ e,t ( x e ) ≤ X e ∈ Q ˜ c ′ e ( z e ) z ′ e,t ( x e ) is equi vale nt to X e ∈ P c ′ e ( z e ) z ′ e,t ( x e ) ≤ X e ∈ Q c ′ e ( z e ) z ′ e,t ( x e ) , 16 therefo re con dition (3) is also satisfied. For the conditio n (4), let us first note that as discu ssed abo ve R s,t = H ( X s ) for all s ∈ S, t ∈ T . This impli es t hat th ere is no pair ( i, j ) ∈ S × S satisfyin g the promise in condit ion (4) i.e. there is no pair ( i, j ) such that j participates in all tight rate i nequali ties in vol ving i (simply becaus e j does not participate in the tight rate inequa lity R i,t = H ( X i ) ). Thus, ( f , R ) satisfies all the 4 condit ions in Theorem 11 for the inst ance ( G, ˜ c , ˜ d, R S W ) and hence is an OPT flo w-rate for ( G, ˜ c, ˜ d, R S W ) . 5 The Flows and Rates at Nash Equi librium In this section , we study the proper ties of a Nash flow-rate whene ver the indi vidual optimization problem (i.e. the best resp onse p roblem) of each terminal is con vex, that is whene ver Nash equilibrium can be consid ered as an appro priate solutio n conce pt for the Distrib uted Compression Game when vie w ed through the algor ithmic lens. Therefore , throughou t this section, we assume that the edge cost splitting mechanism Ψ , as well as, the sour ce cost splittin g mechanism Φ are such that the functi ons C ( t ) , for all t ∈ T , are con ve x. By con sidering the best respo nse problem of each te rminal, and an approach essenti ally the sa me as in the Section 4 for charac terizing OPT flow-ra te, w e can obtain the followin g T heorem 13 for characteri zing Nash flow-ra te. Theor em 13 Consider an instance ( G, c, d, R S W , Ψ , Φ) wher e C ( t ) is con ve x for all t ∈ T . A feasibl e flow-r ate ( f , R ) for the instance ( G, c, d, R S W ) , whi ch satisfies the following four conditions is a Nash flow- rat e for ( G, c, d, R S W , Ψ , Φ) . F urther , when C ( t ) is strictly con ve x for all t ∈ T , these conditi ons ar e also necess ary . (1) ∀ t ∈ T , ∀ s ∈ S , we have X P ∈ P s,t f P = R s,t . (2) ∀ t ∈ T , we have X s ∈ S R s,t = H ( X S ) . (3) ∀ t ∈ T , ∀ s ∈ S , P , Q ∈ P s,t with f P > 0 , ∂ C ( t ) E ( f ) ∂ f P ≤ ∂ C ( t ) E ( f ) ∂ f Q . (4) F or t ∈ T , let j ∈ S partici pates in all tight rate i nequal ities in volving i ∈ S (i.e. if A ⊆ S , such tha t i ∈ A and P l ∈ A R l,t = H ( X A | X − A ) , then j ∈ A ) and let P ∈ P i,t , Q ∈ P j,t with f P > 0 then w e have ∂ C ( t ) E ( f ) ∂ f P + ∂ C ( t ) S ( R ) ∂ R i,t ≤ ∂ C ( t ) E ( f ) ∂ f Q + ∂ C ( t ) S ( R ) ∂ R j,t . Further , under similar con vexity cond itions, we can also sho w that a Nash fl o w-rate always exists for the Distrib uted Compression Game. This is done via fi rst compactifying the strategy sets A t ’ s to obtain a restric ted game where e xistenc e of a Nash equil ibrium follo ws from the standa rd fixed po int theorems [21]. Then, by utilizin g the monoton ically non-decrea sing prope rties of variou s cost functions , it is ar gued that a Nash equilibriu m of the restricted game is also a Nash flow-ra te for our Distrib uted Compr ession Game thereb y pro ving the existen ce of a Nash flow-ra te for Distrib uted Compr ession Game . The Theorem 14 in the follo wing is a very stan dard and pop ular result on the exi stence of Nash equil ib- rium and we adopt it from the book by Osborne and Rubinst ein [21]. 17 Theor em 14 The stra te gic game h N , ( A i ) , ( i ) i has a N ash equilibri um if for all i ∈ N , the following condit ions hold. a) The set A i of actions of playe r i is a nonempty compact con ve x subset of a Euclidean space . b) The pr efer ence r elation i is continuous and quasi-co ncave on A i . A pre fer ence r elation i on A is said to be quasi- concave on A i if for every a ∈ A the set { ˜ a i ∈ A i : ( a − i , ˜ a i ) i a } is con ve x. A pr efer ence rel ation i on A is sai d to be co ntinuou s if a i b whenev er ther e ar e seque nces { a k } and { b k } with a k , b k ∈ A and a k i b k for a ll k such that { a k } and { b k } con ver ge to a and b re spective ly . No w , let us cons ider an instan ce ( G, c, d, R S W , Ψ , Φ) of th e Dist rib uted Compressio n Game, wher e C ( t ) is con vex for all t ∈ T . The action set of the terminal t ∈ T is A t = ( f t , R t ) : f P ≥ 0 ∀ P ∈ P t , P P ∈ P s,t f P ≥ R s,t ∀ s ∈ S, R t ∈ R S W . (5) Clearly this is a nonempt y con ve x subset of an Euclidean Space, b ut it is not compact. Let us cons ider a game with a restr icted set of strateg ies denoted ˜ A t ’ s as follo ws and let us call this ne w game as the r estricted game for the instanc e ( G, c, d, R S W , Ψ , Φ) . ˜ A t = ( f t , R t ) : f P ≥ 0 ∀ P ∈ P t , P P ∈ P s,t f P ≥ R s,t ∀ s ∈ S, R t ∈ R S W , f P ≤ H ( X S ) ∀ P ∈ P t , R s,t ≤ H ( X S ) ∀ s ∈ S . (6) No w the set ˜ A t becomes compact a s it is a closed and bou nded subset of an Euclidea n s pace, and therefo re ˜ A t satisfies the requiremen t ( a ) of the Theorem 14. Since play ers’ cost function s C ( t ) are con vex and continuous for all t ∈ T , the condition ( b ) in the Theorem 14 is also satisfied and we obtain the follo wing result. Lemma 15 The res tricted game for the instance ( G, c, d, R S W , Ψ , Φ) , wher e C ( t ) is con vex for all t ∈ T , admits a Nash equili brium. No w w e claim that ev ery Nash equi librium of the restricted game is also a N ash equilibriu m for the origin al game and that will imply the exis tence of a Nash flow-rat e for the original game. Lemma 16 Every Nash equil ibrium of the re stricted game for the instan ce ( G, c, d, R S W , Ψ , Φ) , whe r e C ( t ) is con vex for all t ∈ T , is also a Nash flow-rate for the insta nce ( G, c, d, R S W , Ψ , Φ) . Pro of: Let ( f , R ) be a Nash equilib rium of the restrict ed game for the instance ( G, c, d, R S W , Ψ , Φ) . Then, for all t w e ha ve C ( t ) ( f , R ) ≤ C ( t ) ( f − t , R − t , ˜ f t , ˜ R t ) for all ˜ f t , ˜ R t feasib le for the restrict ed game i.e. coming from the restricte d strateg y set ˜ A t . 18 No w let ( ˜ f t , ˜ R t ) ∈ A t \ ˜ A t i.e. ˜ f t , ˜ R t is feasib le for the original game b ut not feasible for the restric ted game. For eas e of notation, let us define the followin g quan tities. S 1 ,t = n s ∈ S : ˜ R s,t > H ( X S ) o , S 2 ,t = S \ S 1 ,t R ′ t = n R ′ s,t := H ( X S ) | s ∈ S 1 ,t o P 1 t = n P ∈ P t : ˜ f P > H ( X S ) o , P 2 t = P t \ P 1 t f ′ t = n f ′ P := H ( X S ) | P ∈ P 1 t o Note that in defining R ′ t and f ′ t we ha ve projected all the flo ws and rates violating the feasibility for the restric ted game to their bounda ry v alues and therefore the strat egy ( f ′ t , { ˜ f P : P ∈ P 2 t } , R ′ t , { ˜ R s,t : s ∈ S 2 ,t } ) ∈ ˜ A t i.e. it is feasible for the restricted game. No w , C ( t ) ( f − t , R − t , ˜ f t , ˜ R t ) ≥ C ( t ) ( f − t , R − t , ˜ f t , R ′ t , { ˜ R s,t : s ∈ S 2 ,t } ) ≥ C ( t ) ( f − t , R − t , f ′ t , { ˜ f P : P ∈ P 2 t } , R ′ t , { ˜ R s,t : s ∈ S 2 ,t } ) and since ( f , R ) is a Nash equilibrium for the restricted game and ( f ′ t , { ˜ f P : P ∈ P 2 t } , R ′ t , { ˜ R s,t : s ∈ S 2 ,t } ) is feasib le for the restric ted game we ha ve C ( t ) ( f , R ) ≤ C ( t ) ( f − t , R − t , f ′ t , { ˜ f P : P ∈ P 2 t } , R ′ t , { ˜ R s,t : s ∈ S 2 ,t } ) ≤ C ( t ) ( f − t , R − t , ˜ f t , ˜ R t ) and theref ore C ( t ) ( f , R ) ≤ C ( t ) ( f − t , R − t , ˜ f t , ˜ R t ) for all ( ˜ f t , ˜ R t ) ∈ A t implying that ( f , R ) is a Nash equili brium of the origin al game meaning ( f , R ) is a Nash flow-ra te for the instance ( G, c, d, R S W , Ψ , Φ) Combining the Lemmas 15 and 16 we obtain the follo wing theore m. Theor em 17 An insta nce ( G, c, d, R S W , Ψ , Φ) , wher e C ( t ) is co n vex for all t ∈ T , ad mits a Nash fl ow-rate . 6 W ardr op Flow-Rate and the Price of Anar chy In this section , we in vestigate the inef ficiency brough t forth by the selfish beha vior of terminals. First, we will show that the W ardrop equilibrium is a socially optimal solution for a dif ferent set of (related ) cost functi ons. Using this, we w ill co nstruct expl icit exampl es that demonst rate that the PO A > 1 and deter mine near -tight upper bounds on the POA as well. W e start out with the characte rization of W ardrop flow-rat e. Theor em 18 Let z e ( x e ) = P t ∈ T x n e,t 1 n , Ψ e,t ( x e ) = x n e,t ( P j ∈ T x n e,j ) and Φ s,t ( ρ s ) = 1 N T . A W ar dr op flow- rat e for ( G, c, d, R S W , Ψ , Φ) is a n OP T flow-rat e fo r ( G, ˜ c, d, R S W ) , w her e ˜ c e ( x ) = N T R c e ( x ) x dx . F urther , when the edge cost functions c e for all e ∈ E and the sour ce cost functio ns d s for all s ∈ S ar e strictly con ve x, an OPT flow-r ate for ( G, c, d, R S W ) is also a W ar dr op flow-rat e for ( G, ˆ c, d, R S W , Ψ , Φ) , w her e ˆ c e ( x ) = 1 N T xc ′ e ( x ) . Pro of: W e will sho w that the definition of a W ardrop flo w-rate for instan ce ( G, c, d, R S W , Ψ , Φ) ex actly corres ponds to the four condi tions for the instance ( G, ˜ c , d, R S W ) in Theorem 11. 19 W e ha ve, z ′ e,t ( x e ) = 1 n X j ∈ T x n e,j 1 n − 1 nx n − 1 e,t = z e x e,t x n e,t P j ∈ T x n e,j . Therefore , C P ( f ) = X e ∈ P c e ( z e ) x n − 1 e,t P j ∈ T x n e,j = X e ∈ P c e ( z e ) z ′ e,t ( x e ) z e = 1 N T X e ∈ P ˜ c ′ e ( z e ) z ′ e,t ( x e ) where the last equalit y follo ws from the fact that ˜ c e ( x ) = N T Z c e ( x ) x dx = ⇒ ˜ c ′ e ( x ) = N T c e ( x ) x . Also, C ( t ) S ( R ) = 1 N T X i ∈ S d i ( y i ) , = ⇒ ∂ C ( t ) S ( R ) ∂ R i,t = 1 N T d ′ i ( y i ) y ′ i,t ( ρ i ) . Therefore , C P ( f ) + ∂ C ( t ) S ( R ) ∂ R i,t = 1 N T " X e ∈ P ˜ c ′ e ( z e ) z ′ e,t ( x e ) + d ′ i ( y i ) y ′ i,t ( ρ i ) # . The result follo ws from the equi valen ce of condition s coming from D efinition 3 and Theore m 11. In contrast with the result of [5] that holds for a singl e source with the edge cost splittin g mechanism used above , from T heorem 18 , we can note that for most reasonable cost splitting mechanisms, the POA will not equal one for all monomial edge cost functio ns. W e construct explici t examples for POA > 1 in the Figures 1 and 2. The example in Figure 1 is near tight as will be evi dent from an upper bound on POA deri ved in Theorem 20. It is interest ing to note that in the case when sourc es are independ ent, in the W ardrop or OPT solutio ns, the rates requested at vari ous sources will equal their respecti ve lower bounds (i.e. their entropies ). Ther e- fore, t he c ost ter m c orrespo nding to t he sou rces will be fix ed, and one only needs to find flows that minimize the edge co sts. In this situation, it is not hard to see tha t th e P O A will ag ain equal on e f or all m onomial edge cost functions . i.e. it is the corr elation among the sour ces that is r espon sible for bringing m or e anar chy . W e formalize this belo w . Let C k = { c : c e ( x ) = a e x k , a e > 0 , ∀ e ∈ E } be the set of edge cost functions w here all edge cost functi ons are monomial of the same degre e k possibly with diffe rent coef fi cients, and C mon = ∪ k ≥ 1 C k . Similarly , D k = { d : d i ( y ) = b i y k , b i > 0 , ∀ s ∈ S } . Also, let D conv ex = { d : d i is con vex ∀ i ∈ S } . 20 Cor ollary 19 Correlation Induces A narchy: Let z e ( x e ) = P t ∈ T x n e,t 1 n , Ψ e,t ( x e ) = x n e,t ( P j ∈ T x n e,j ) , y s ( ρ s ) = P t ∈ T R m s,t 1 m , and Φ s,t ( ρ s ) = 1 N T , then we have 1. ρ ( G all , C mon , D conv ex , Ψ , Φ , M ind ) = 1 . 2. ρ ( G all , C N T , D conv ex , Ψ , Φ , M c ) = 1 . 3. ρ ( G all , C mon , D conv ex , Ψ , Φ , M c ) > 1 for lar ge values of m and n . In fact, ρ ( G all , C 1 , D 2 , Ψ , Φ , M c ) > 1+ N T 5 . 4. ρ ( G dsw , C mon , D conv ex , Ψ , Φ , M c ) > 1 for lar ge values of m and n . Pro of: Let c ∈ C mon i.e. c e ( x ) = a e x k for a e > 0 for all e ∈ E , therefore, R c e ( x ) x dx = R a e x k − 1 dx = a e 1 k x k = 1 k c e ( x ) . Also, d ∈ D conv ex . Now , since the sources are independ ent (i.e. R S W ∈ M ind ), from Theorem 1 8 a nd Corol lary 12 it foll ows that a W ardrop flo w -rate for instance ( G, c, d, R S W , Ψ , Φ) is als o an OPT flo w-rate for the instance ( G, c, d, R S W ) which implies that ρ ( G all , C mon , D conv ex , Ψ , Φ , M ind ) = 1 . Even if the sources are correlated, when we ha ve k = N T , we hav e N T R c e ( x ) x dx = c e ( x ) and using Theorem 1 8, a W ardrop flo w-rate f or instan ce ( G, c, d, R S W , Ψ , Φ) is also an OP T flow-r ate for t he inst ance ( G, c, d, R S W ) which implies that ρ ( G all , C N T , D conv ex , Ψ , Φ , M c ) = 1 . W e prov e ρ ( G all , C 1 , D 2 , Ψ , Φ , M c ) > 1+ N T 5 and conseq uently ρ ( G all , C mon , D conv ex , Ψ , Φ , M c ) > 1 , by explici tly constructin g an example as pro vided in Figure 1. All sources are identic al w ith entropy h , therefo re, R S W ∈ M c . Let d s ( y ) = C 1 y 2 for all s ∈ S , therefore , d ∈ D 2 , and the edge cost function s, c e ( x ) = x ex cept for the edge ( u, v ) for w hich c e ( x ) = C 2 x . Therefore, c ∈ C 1 . Let us consider the follo wing flow-ra te ( f , R ) R 1 ,t = h ∀ t ∈ T R s,t = 0 ∀ s ∈ S − { 1 } , t ∈ T f (1 ,t ) = h ∀ t ∈ T over d otted edges in Figure 1 f P = 0 ∀ P ∈ P t − { (1 , t ) } , t ∈ T . Clearly , ( f , R ) is feasib le f or the instan ce ( G, c, d, R S W ) . W e claim t hat ( f , R ) is a W ardrop flow-rate for the instan ce ( G, c, d, R S W , Ψ , Φ) when 2 C 1 h N T ≤ 1 + C 2 . T o see this, first note that ( f , R ) satisfies t he Conditio ns (1) and (2) in the definition of W ardrop flow-rate (Definition 3 ) for the instanc e ( G, c, d, R S W , Ψ , Φ) . W e will now check the conditions (3) and (4) in Definition 3. N ote that Ψ e,t ( x e ) = 1 N T whene ver x e,t = x for 21 all t ∈ T for some x > 0 and by conti nuity this is true e ven if x = 0 . Therefore, C (1 ,t ) ( f ) = X e ∈{ (1 ,t ) } c e ( z e )Ψ e,t ( x e ) x e,t = h . 1 h = 1 , C (1 ,u,v, t ) ( f ) = X e ∈{ (1 ,u ) , ( u,v ) , ( v ,t ) } c e ( z e )Ψ e,t ( x e ) x e,t = lim x − → 0 x . (1 / N T ) x + C 2 x . (1 / N T ) x + x . 1 x = 1 + 1 + C 2 N T , and similarly C ( s,u,v ,t ) ( f ) = 1 + 1 + C 2 N T , s ∈ S − { 1 } . Clearly , the condition (3) is satisfied as C (1 ,t ) ( f ) < C (1 ,u,v, t ) ( f ) . Also, ∂ C ( t ) S ( R ) ∂ R i,t = 1 N T d ′ i ( y i ) y ′ i,t ( ρ i ) = 1 N T 2 C 1 y i y ′ i,t ( ρ i ) = 2 C 1 N T y 2 i R m − 1 i,t P j ∈ T R m i,j = 2 C 1 N T X j ∈ T R m i,j 2 /m R m − 1 i,t P j ∈ T R m i,j . ∴ ∂ C ( t ) S ( R ) ∂ R 1 ,t = 2 C 1 N T ( N T h m ) 2 /m h m − 1 N T h m = 2 C 1 h N 2 T as m − → ∞ and ∂ C ( t ) S ( R ) ∂ R s,t ≥ 0 , ∀ s ∈ S − { 1 } . Therefore , when 2 C 1 h N T ≤ 1 + C 2 , we get C (1 ,t ) ( f ) + ∂ C ( t ) S ( R ) ∂ R 1 ,t ≤ C ( s,u,v ,t ) ( f ) + ∂ C ( t ) S ( R ) ∂ R s,t ∀ s ∈ S − { 1 } 22 which implies that the condition (4) is also satisfied. Thus, ( f , R ) is indeed a W ardrop flow-rate for the instan ce ( G, c, d, R S W , Ψ , Φ) . Further , C ( f , R ) = X e ∈∪ t ∈ T { (1 ,t ) } c e ( z e ) + X e ∈∪ s ∈ S { ( s,u ) } c e ( z e ) + c ( u,v ) ( z ( u,v ) ) + X e ∈∪ t ∈ T { ( v,t ) } c e ( z e ) + X s ∈ S d s ( y s ) = N T h + 0 + 0 + 0 + C 1 ( N T h m ) 2 /m = N T h + C 1 h 2 as m − → ∞ . No w let us consid er another flow-ra te ( f ∗ , R ∗ ) R ∗ s,t = h N S ∀ s ∈ S, t ∈ T f ∗ (1 ,t ) = 0 ∀ t ∈ T , and f ∗ ( s,u,v ,t ) = h N S ∀ s ∈ S, t ∈ T . Clearly , ( f ∗ , R ∗ ) is feasib le for the instan ce ( G, c, d, R S W ) . Further , C ( f ∗ , R ∗ ) = X e ∈∪ t ∈ T { (1 ,t ) } c e ( z ∗ e ) + X e ∈∪ s ∈ S { ( s,u ) } c e ( z ∗ e ) + c ( u,v ) ( z ∗ ( u,v ) ) + X e ∈∪ t ∈ T { ( v,t ) } c e ( z ∗ e ) + X s ∈ S d s ( y ∗ s ) = 0 + N S N T ( h N S ) n 1 /n + C 2 ( N T h n ) 1 /n + N T h + N S C 1 N T ( h N S ) m 2 /m = h (1 + C 2 + N T ) + C 1 h 2 N S as m − → ∞ , n − → ∞ . Thus, when 1+ C 2 C 1 < h (1 − 1 N S ) , we ha ve C ( f ∗ , R ∗ ) < C ( f , R ) . As O P T ( G, c, d, R S W ) ≤ C ( f ∗ , R ∗ ) , this implies that the PO A is grea ter than one. In parti cular , ρ ( G all , C 1 , D 2 , Ψ , Φ , M c ) > C 1 + N T h 1+ C 2 + N T h + C 1 N S . No w , tak e h = 1 , N S = N T > 4 , 1 + C 2 = 3 N T , C 1 = N 2 T , and note that 2 C 1 h N T = 2 N T < 3 N T = 1 + C 2 , as well as, 1 + C 2 C 1 = 3 N T < (1 − 1 N T ) = (1 − 1 N S ) as N T > 4 . 23 u v 1 2 N S -1 N S t 1 t 1 t N T - 1 t N{T} Figure 1: Example of a network where PO A is linear in N T . 1 2 t 1 t 2 Figure 2: Classical Slepian-W olf network with appro priate costs also has PO A > 1. 24 Therefore , we get ρ ( G all , C 1 , D 2 , Ψ , Φ , M c ) > 1 + N T 5 . This is near tight as will be ev ident from Theorem 20. T o establish (4), w e will pro ve a strong er result, ρ ( G dsw , C 3 , D 3 , Ψ , Φ , M c ) > 1 , by construct ing an exa mple as describ ed belo w . As sho wn in Figure 2, there are two sources and two terminals which are directl y connecte d to each source. Both sources are identical w ith entrop y 1 , d 1 ( y ) = C 1 y 3 , d 2 ( y ) = C 2 y 3 with C 1 , C 2 > 0 , C 1 6 = C 2 and c e ( x ) = x 3 for all edges. W e no w outline the ar gument that shows that the PO A > 1. First, observ e that the instance is symmetric with respec t to terminal s and all cost functions are strictly con ve x. T herefo re the OPT flo w rate for the instance, d enoted ( f ∗ , R ∗ ) is such that R ∗ s,t 1 = R ∗ s,t 2 for s = 1 , 2 . Next, by the charac terizati on as per Theorem 18, the W ardrop flow-rate , denoted ( f , R ) is an OPT flow-ra te for ˜ c e ( x ) = 2 3 x 3 with the source cost functions remainin g the same. This new instan ce with ˜ c e ( x ) = 2 3 x 3 is also symmetric with respect to the terminals and the cost functions remain stric tly con ve x. Therefore we con clude that for the W ardrop flow-rat e as well R s,t 1 = R s,t 2 for s = 1 , 2 . Let R 1 ,t 1 = R 1 ,t 2 = h and R ∗ 1 ,t 1 = R ∗ 1 ,t 2 = h ∗ . Using the propertie s of W ardrop flow-rat e and OP T fl o w rate as per Condition (2) in Theorem 11, we ha ve R 2 ,t 1 = R 2 ,t 2 = 1 − h and R ∗ 2 ,t 1 = R ∗ 1 ,t 2 = 1 − h ∗ . W e ar gue belo w that h 6 = h ∗ . Conseque ntly , by uniquene ss of the O PT flo w-rate (due to strict con vex ity of the object iv e functio n) we will ha ve C ( f , R ) > C ( f ∗ , R ∗ ) implying ρ ( G dsw , C 3 , D 3 , Ψ , Φ , M c ) > 1 . W e hav e, for t = t 1 , t 2 , ∂ C ( t ) S ( R ) ∂ R 1 ,t = 1 N T d ′ 1 ( y 1 ) y ′ 1 ,t ( ρ 1 ) = 3 2 C 1 y 2 1 y 1 R m − 1 1 ,t P 2 j =1 R m 1 ,j = 3 4 C 1 h 2 as m → ∞ . Similarly , ∂ C ( t ) S ( R ) ∂ R 2 ,t = 3 4 C 2 (1 − h ) 2 . By the definition of W ardrop flow-ra te, we ha ve f (1 ,t ) = h, f (2 ,t ) = (1 − h ) . Thus, C (1 ,t ) ( f ) = h 2 , C (2 ,t ) ( f ) = (1 − h ) 2 . Further , ∂ C ( t ) S ( R ) ∂ R 1 ,t + C (1 ,t ) ( f ) = ∂ C ( t ) S ( R ) ∂ R 2 ,t + C (2 ,t ) ( f ) implies that 3 4 C 1 h 2 + h 2 = 3 4 C 2 (1 − h ) 2 + (1 − h ) 2 . Therefore , h 1 − h = s 3 4 C 2 + 1 3 4 C 1 + 1 . 25 No w , from T heorem 18, ( f ∗ , R ∗ ) is a W ardrop flow-rate for th e insta nce where ev erythin g remains th e sa me exc ept for the edge cost functions which are no w 3 2 x 3 instea d of x 3 and performing the similar calcu lations as abo ve for ( f , R ) , we obtain h ∗ 1 − h ∗ = s 3 4 C 2 + 3 2 3 4 C 1 + 3 2 . Clearly , s ince C 1 6 = C 2 , we get h 6 = h ∗ . In partic ular , take C 1 = 4 , C 2 = 8 , t hen h = 0 . 5695 and h ∗ = 0 . 5635 . Thus, C ( f , R ) = 1 . 9061 , C ( f ∗ , R ∗ ) = 1 . 9052 implyin g that P O A ≥ 1 . 00 4 > 1 , in this exa mple. Note that while constructi ng the above examples the source cost splitting function we ha ve used is Φ s,t ( ρ s ) = 1 / N T . Further , for the same mechanism, Corollary 19(2) provi des an exampl e of edge cost functi ons that gi ves a PO A of one, and possib ly this is the only choice giv ing POA one . Before conside ring anothe r reasona ble split ting mechan ism, we first establish an upper bound which is nearly attainable by instan ce gi ven in Figure 1. Theor em 20 Let z e ( x e ) = P t ∈ T x n e,t 1 n , Ψ e,t ( x e ) = x n e,t ( P j ∈ T x n e,j ) and Φ s,t ( ρ s ) = 1 N T . Then, ρ ( G all , C k , D conv ex , Ψ , Φ , M c ) ≤ max { N T k , k N T } . Pro of: As in the proof of T heorem 18, we ha ve, C P ( f ) = 1 N T P e ∈ P ˜ c ′ e ( z e ) z ′ e,t ( x e ) and C P i ( f ) + ∂ C ( t ) S ( R ) ∂ R i,t = 1 N T h P e ∈ P i ˜ c ′ e ( z e ) z ′ e,t ( x e ) + d ′ i ( y i ) y ′ i,t ( ρ i ) i . Let ( f , R ) be a W ardrop flo w-rate and ( f ∗ , R ∗ ) be OPT for ( G, c, d, R S W ) respect iv ely . Further , let ˜ c e ( x ) = N T R c e ( x ) x dx = N T R a e x k − 1 dx = N T k a e x k . Now , C ( f , R ) = X e ∈ E c e ( z e ) + X s ∈ S d s ( y s ) = X e ∈ E a e z k e + X s ∈ S d s ( y s ) and C ( f ∗ , R ∗ ) = X e ∈ E c e ( z ∗ e ) + X s ∈ S d s ( y ∗ s ) = X e ∈ E a e ( z ∗ e ) k + X s ∈ S d s ( y ∗ s ) Let us first conside r the case where N T ≥ k i.e. 1 ≤ N T k . C ( f , R ) = X e ∈ E a e z k e + X s ∈ S d s ( y s ) ≤ X e ∈ E N T k a e z k e + X s ∈ S d s ( y s ) = X e ∈ E ˜ c e ( z e ) + X s ∈ S d s ( y s ) . 26 No w , from Theorem 18, ( f , R ) is OPT for ( G, ˜ c, d, R S W ) and becaus e ( f ∗ , R ∗ ) is feasible for ( G, ˜ c, d, R S W ) we get X e ∈ E ˜ c e ( z e ) + X s ∈ S d s ( y s ) ≤ X e ∈ E ˜ c e ( z ∗ e ) + X s ∈ S d s ( y ∗ s ) = X e ∈ E N T k a e ( z ∗ e ) k + X s ∈ S d s ( y ∗ s ) ≤ N T k " X e ∈ E a e ( z ∗ e ) k + X s ∈ S d s ( y ∗ s ) # = N T k C ( f ∗ , R ∗ ) . Therefore , C ( f , R ) C ( f ∗ , R ∗ ) ≤ N T k . Similarly , for the case w hen N T ≤ k i.e. 1 ≥ N T k , C ( f , R ) = X e ∈ E a e z k e + X s ∈ S d s ( y s ) = k N T " X e ∈ E N T k a e z k e + X s ∈ S N T k d s ( y s ) # ≤ k N T " X e ∈ E N T k a e z k e + X s ∈ S d s ( y s ) # = k N T " X e ∈ E ˜ c e ( z e ) + X s ∈ S d s ( y s ) # No w , from Theorem 18, ( f , R ) is OPT for ( G, ˜ c, d, R S W ) and because ( f ∗ , R ∗ ) is feasibl e for ( G, ˜ c, d, R S W ) we get X e ∈ E ˜ c e ( z e ) + X s ∈ S d s ( y s ) ≤ X e ∈ E ˜ c e ( z ∗ e ) + X s ∈ S d s ( y ∗ s ) = X e ∈ E N T k a e ( z ∗ e ) k + X s ∈ S d s ( y ∗ s ) ≤ X e ∈ E a e ( z ∗ e ) k + X s ∈ S d s ( y ∗ s ) = C ( f ∗ , R ∗ ) Therefore , C ( f , R ) C ( f ∗ , R ∗ ) ≤ k N T . No w we co nsider anoth er splitting mechanis m Φ that look s more lik e the ed ge cost spl itting mechanism Ψ . Specifically , tak e y s ( ρ s ) = P t ∈ T ( R s,t ) m 1 m and Φ i,t ( ρ i ) = ( R i,t ) m P j ∈ T ( R i,j ) m . Let u s first note the general- ization of C orollar y 19(1) for an y so urce cost spli tting mechanism Φ . P roof is esentially the same as before. The conditio n (2) in the definitio n of W ardrop flow-r ate as well as OPT flo w-rate renders all the rates to be equal to their corre spondin g entropi es and consequ ently the condition (4) need not be checke d. 27 Lemma 21 Let z e ( x e ) = P t ∈ T x n e,t 1 n , Ψ e,t ( x e ) = x n e,t ( P j ∈ T x n e,j ) , an d Φ s,t ( ρ s ) be an y sour ce cost s plitting functi on, then we have ρ ( G all , C mon , D conv ex , Ψ , Φ , M ind ) = 1 . No w , we will ar gue that with y s ( ρ s ) = P t ∈ T ( R s,t ) m 1 m and Φ i,t ( ρ i ) = ( R i,t ) m P j ∈ T ( R i,j ) m we ha ve ρ ( G dsw , C mon , D conv ex , Ψ , Φ , M c ) > 1 for larg e value s of m and n . Let us con sider the same ex ample as in Figure 2 bu t with the new so urce cost splitting mechanism. First, note that OPT flow-rate is indep endent of the choice of cost splitting functi ons and the pre viously calculate d O PT flow-rate for this instance ( f ∗ , R ∗ ) is gi ven by R ∗ 1 ,t = f ∗ (1 ,t ) = h ∗ , and R ∗ 2 ,t = f ∗ (2 ,t ) = 1 − h ∗ . W e will arg ue that this i s n ot a W ardrop flow-rate and since the OPT flo w-rate is unique (by strict con vexity ) we will obtain P O A > 1 . After some simple calcula tions we get ∂ C ( t ) S ( R ) ∂ R i,t = d ′ i ( y i ) y i R i,t Φ 2 i,t ( ρ i ) + m d i ( y i ) R i,t Φ i,t ( ρ i ) (1 − Φ i,t ( ρ i )) . Therefore , ∂ C ( t ) S ( R ∗ ) ∂ R 1 ,t = ( m + 3)( N T ) 3 /m C 1 4 ( h ∗ ) 2 and ∂ C ( t ) S ( R ∗ ) ∂ R 2 ,t = ( m + 3)( N T ) 3 /m C 2 4 (1 − h ∗ ) 2 . Also, C (1 ,t ) ( f ∗ ) = ( h ∗ ) 2 and C (2 ,t ) ( f ∗ ) = (1 − h ∗ ) 2 . Note that N T = 2 in this exa mple. No w , with C 1 = 4 , C 2 = 8 , we ha ve h ∗ = 0 . 5635 and therefo re C (1 ,t ) ( f ∗ ) + ∂ C ( t ) S ( R ∗ ) ∂ R 1 ,t C (2 ,t ) ( f ∗ ) + ∂ C ( t ) S ( R ∗ ) ∂ R 2 ,t = ( h ∗ ) 2 + ( m + 3)( N T ) 3 /m C 1 4 ( h ∗ ) 2 (1 − h ∗ ) 2 + ( m + 3)( N T ) 3 /m C 2 4 (1 − h ∗ ) 2 = ( m + 3)( N T ) 3 /m + 1 2( m + 3)( N T ) 3 /m + 1 0 . 5635 2 (1 − 0 . 5635) 2 = 1 2 0 . 5635 2 (1 − 0 . 5635) 2 = 0 . 8333 6 = 1 as m → ∞ . Theor em 22 Let z e ( x e ) = P t ∈ T x n e,t 1 n , y s ( ρ s ) = P t ∈ T ( R s,t ) m 1 m , Ψ e,t ( x e ) = x n e,t ( P j ∈ T x n e,j ) , an d Φ i,t ( ρ i ) = ( R i,t ) m P j ∈ T ( R i,j ) m for lar ge values of m and n , then we have ρ ( G dsw , C mon , D conv ex , Ψ , Φ , M c ) > 1 . 28 7 Futur e Direction s In this work, we hav e initi ated a study of the inefficie ncy brough t forth by the lack of regulatio n in the multicas t of multiple corr elated sour ces . W e hav e est ablishe d the foundation s of the frame work by providing the first set of technica l resu lts that character ize the equilibrium among terminals, when they act selfishly trying to mini mize their indi vidual costs without any r egard to so cial welfare , and its relation to the socia lly optimal solution. Our work leav es out se vera l impo rtant o pen problems that deserve theoreti cal in vest igation and analys is. W e discuss some of these interesti ng problems in the follo wing. Network Informa tion Flow Games: F r om Slepian-W olf to Poly matr oids: It is interesting to note that all the results presente d in this chapter naturally exten ds to a lar ge class of network information flow prob- lems where the entro py is replaced by any rank function (ref. Chapter 10 in [10]) and equi vale ntly con- dition al entropy is replaced by an y supermodu lar funct ion. This is becaus e the only special property of condit ional entropy used in our analysis is its supermodular ity . Polytopes described by such rank functions are called contra- polymatr oids and the SW polytope is an exampl e. Therefore, by abstracti ng the network coding sce nario to this more gen eral setting, we can ob tain a nice clas s of multi-pla yer games wit h compact repres entation s, whic h we call Network Information Flow Games . It would be interesting to study these games furt her and in vestigate the emer gence of practical and meaningfu l scenario s beyon d network coding. Furthermor e, the network codi ng scenario where the termina ls do not neces sarily want to rec onstruct all the source s shoul d also be interes ting to analyze . Dynamics of W ardr op F low-Rate : Can we design a noncoo perati ve decentra lized algori thm that steers flows a nd rates in way that con ver ges to a W ardrop fl o w-rate? What about such an algorith m which runs in polyn omial time? A first approach could be to consider an algor ithm where each termin al greedi ly allocates rates and flows by calculating mar ginal costs at each step. The follo wing theorem, which follo w s from an approa ch similar to that in the pro of of Theorem 11, provide s some intuiti on on w hy such a greedy app roach might work, as per the rel ationsh ip between W ardrop and OPT accord ing to Theorem 18. Theor em 23 Let ( f , R ) be an O PT flow-rate for instance ( G, c, d, R S W ) and define h s,t := d ′ s ( y s ) y ′ s,t ( ρ s )+ λ s,t for s ∈ S, t ∈ T , wher e λ s,t ’ s ar e dual variable s satisfy ing KKT condi tions 3, 4. Further , let σ : T × S − → S be define d suc h that 0 < h σ ( t, 1) ,t < h σ ( t, 2) ,t < · · · < h σ ( t,N s ) ,t . Then, k X i =1 R σ ( t,i ) ,t = H ( X σ ( t, 1) , X σ ( t, 2) , . . . , X σ ( t,k ) ) for k = 1 , . . . , N s . Better bounds on POA: Alth ough we hav e pro vided exp licit example s where correlation brings more anarch y , as well as, an upper bound on POA which is nearly achie vable, we belie ve that more detailed analys is is necessary . An import ant approach in this direction would be to charac terize exactly ho w the PO A depen ds on structu re of SW region i.e. to analyze the finer details on ho w correlation among sources chang es POA, ev en in the case of two sources. Furt her , other interes ting splitting mechanisms should also be studied . Capacity Constraints and Appr oximate W ardr op F low-Rates : O ne immediate direction of in vestiga- tion could be to consider the scenar io where there is a capaci ty constr aint on each edge i.e. the maximum amount of flow that can be se nt thro ugh that e dge. Another inter esting problem is to in ves tigate the s ensiti v- ity o f the impli cit assumption in ou r anal ysis that termin als can e v aluate v arious qua ntities, and in p articular the margina l costs, w ith arbitrary precision. T his can be achiev ed by formulating a notion of approximate W ardrop flow-rat e, where terminals can distingu ish quantities only when they dif fer signi ficantly . 29 Refer ences [1] R. Ahlswede, N. Cai, S.-Y . R. Li, an d R. W . Y eung. Network Info rmation F lo w. IEEE T rans. on I nfo. Th. , 46, no. 4:1204–1 216, 2000. [2] J. Barros and S. D. Servetto . Network Info rmation F lo w with Correlated Sources. IEEE T rans. on I nfo. Th. , 52:155–17 0, Jan. 2006. [3] M. Beckman, C. B. McGuire, and C. B. W insten. Studie s in the Economics of T ranspo rtation . Y ale Univ ersity P ress, Ne w Hav en,CT , 1956. [4] S. Betz and H. V . Poor . Ener gy efficien cy in multi-hop cdma network s: A game theore tic analysi s. In ICP ADS ’06: P r oceeding s of the 12th Internat ional Confe r ence on P aralle l and Distribu ted Systems , pages 83–90, 2006. [5] S. Bhadra, S. Shakkot tai, and P . Gupta. Min-Cost Selfish Multica st W ith N etwork Cod ing. IEEE T rans. on I nfo. Th. , 52, no. 11:5077– 5087, 2006. [6] S. Boyd and L. V andenb er ghe. Con ve x Optimizatio n . Cambridge Uni versi ty Press, 2004 . [7] T . M. Cover and J. A. Thomas. Elements of Infor mation Theory . W iley Series, 1991 . [8] R. Cristescu, B. Beferull-Loza no, and M. V etterli. Network ed Slepian-W olf: theory , algorithms, and scaling laws. IEEE T rans. on I nfo. Th. , 51, no. 12:4057– 4073, 2005. [9] S. C. Dafermos and F . T . Sparrow . The traf fi c assignment problem for a general network . J . Res. Nat. Bur eau of Standar ds, Series B , 73B(2):91–1 18, 1969. [10] M. Grotsche l, L. Lov asz, and A. Schrijv er . Geometric Algorit hms and Combinato rial Optimizatio n . Springer , 1993. [11] P . Gupta and P . R. Kumar . A syste m and traf fic depende nt adapti ve routing algori thm for ad hoc netwo rks. In In Pr oceedings of the 36th IEEE Confer ence on Decision and Contr ol , pages 2375–23 80, 1997. [12] T . S. Han. Slepian-W olf-Cov er Theorem for a Network of Chann els. Inform. Contr . , 47, no. 1:67– 83, 1980. [13] Z. Han and H. V . Poor . Coalition games with cooperati ve transmission : A cure for the curse of bound ary nodes in selfish pack et-forw arding w ireless net works. In W iOpt 2007 , 2007. 30 [14] T . Ho, M. M ´ edard, M. Ef fros, and R. K oetter . Network Codin g for Correlated Sources. In Conf . Information Science and Systems , 2004. [15] E. K outsoup ias and C. Papad imitriou. W orst-cas e equili bria. In Pr oceedings of the 16th Annual Symposium on Theor etical Aspects of Computer Science , pag es 404–4 13, 1999. [16] Z. Li. Min-Cost Multica st of Selfish Informati on Flows. In Pr oc. of IEEE INFO COM , 20 07. [17] Z. Li. Cross-Mon otonic Multicast . In Pr oc. of IEEE INFO COM , 20 08. [18] Z. Li and B. Li. Efficie nt and Distrib uted Computation of Maximum Multicast Rates. In Pr oc. of IEEE INFO COM , 20 05. [19] D. S. Lun, N. Ratnakar , M. M ´ edard, R. Ko etter , D. R. Karger , T . Ho, E. Ahmed, and F . Zhao. Minimum-Cost Multica st ov er Coded Pack et Networks. IEEE T rans. on I nfo. Th. , 52:2608–2 623, June 2006. [20] N. Nisan, T . Roughgarde n, E. T ardos, and V . V . V azirani. Algorith mic Game Theory . Cambridge Uni versi ty Press, Ne w Y ork, NY , US A, 2007. [21] M. J. Osborne and A. Rubinstei n. A Cour se in Game T heory . The MIT Press, Cambridge, MA, USA, 1994 . [22] C. Papadi mitriou. Algorith ms, games, and the interne t. In STOC ’01: Pr oceedin gs of the thirty-thir d annua l ACM symposium on Theory of computing , pages 749–7 53, New Y o rk, NY , USA, 200 1. ACM. [23] V . Pra bhakara n, D. Tse, and K. Ramchandran. Rate Regi on of the quadratic Gaussian CE O pro blem. In IEEE Intl. Symposiu m on Info. Th. , pages 119–1 19, 2004. [24] A. Ramamoorthy . Minimum cost distrib uted source coding ove r a network . In IEEE Intl. Symposiu m on Info. Th. , pages 1761– 1765, 2007. [25] T . Roughgard en. Selfish Routing and the Price of Anar chy . The MIT Press, 2005. [26] T . Roughgard en and ´ Eva T ardos. Ho w bad is selfish routing? J . A CM , 49(2):2 36–259 , 2002. [27] D. Slepian and J. K. W olf. Noiseles s coding of correlat ed informatio n sources. IEEE T rans. on I nfo. Th. , 19:471–48 0, Jul. 1973. 31 [28] R. Zamir and T . Berge r . Multitermin al source coding with high resoluti on. IEEE T rans. on I nfo. Th. , 45, no. 1:106–11 7, 1999. 32
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment