Flavour tag studies with the LCFIVertex package
In this contribution the status of the flavour tagging performance for the LDCPrime detector model and studies of the track selection parameters and effects from beam backgrounds in flavour tagging using the LCFIVertex package are presented. This work is part of an effort towards a default configuration for the ILD detector optimisation.
💡 Research Summary
This paper presents a comprehensive study of flavour‑tagging performance using the LCFIVertex software package for two detector concepts proposed for the International Linear Collider (ILC): the LDCPrime 02Sc model and the ILD 00 model. The authors generate a large sample of e⁺e⁻ → Z → q q̄ events (q = u, d, s, c, b) at √s = 91.2 GeV with Pythia, simulate the detector response with ilcs soft v01‑03‑06‑p02, and reconstruct events using the Marlin framework. LCFIVertex provides three essential components: the ZVTOP P vertex finder, neural‑network based flavour tagging (separate networks for b‑tag, c‑tag, and bc‑tag), and vertex‑charge reconstruction.
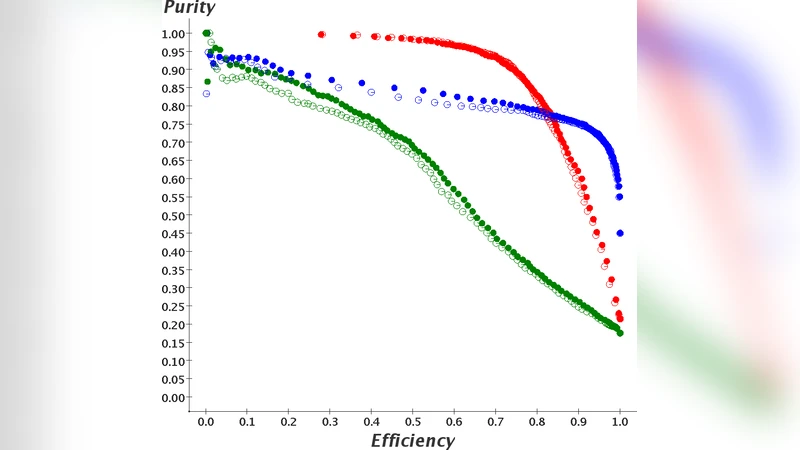
A central focus of the work is the optimisation of the “joint probability” parameters, which quantify the likelihood that a given track originates from the primary vertex. These probabilities are fed directly into the neural networks as input variables. Table 1 lists the tuned parameters (p₁–p₅) for the r‑φ and z dimensions specific to the LDCPrime 02Sc geometry. Using the SignificanceFit processor, the authors recompute the joint probabilities with the new parameters and then retrain the neural networks via the NeuralNetTrainer processor. Figure 1 demonstrates that the retrained networks, tailored to the LDCPrime 02Sc geometry, achieve a noticeable improvement in efficiency versus purity for all three tag categories compared with networks trained on the TESLA geometry.
The study then examines the impact of track‑selection cuts on both primary‑vertex (ipfit) and secondary‑vertex (zvres) reconstruction. Independent variations of impact‑parameter values (d₀, z₀) and their uncertainties, χ²/ndf of the track fit, and transverse momentum p_T are performed. Table 2 presents a set of “preliminary” cuts (e.g., |d₀| < 2 mm, |z₀| < 2 mm, χ²/ndf < 5, p_T > 0.1 GeV). Applying these selections yields modest gains in tagging performance, particularly a slight reduction of b‑jet background in the c‑tag.
To assess the robustness of the flavour tag against realistic ILC beam‑induced backgrounds, the authors overlay simulated noise hits in the vertex detector (VXD). Using the VTXNoiseHits processor, they inject per‑layer noise hit densities of 100, 10, 4, 1, 1 hits /cm² per bunch crossing (inner to outer layer). Figure 2 compares the efficiency‑purity curves with and without these noise hits. The results show that the existing track‑selection criteria already provide a degree of resilience: the degradation in efficiency is limited to a few percent, and no significant change in purity is observed.
Finally, the performance of the ILD 00 model—derived from the GLD concept and featuring three double‑layer VXD structures—is compared with that of LDCPrime 02Sc, which uses five single‑layer VXD sensors. Since no dedicated neural‑network training has yet been performed for ILD 00, the authors reuse the LDCPrime 02Sc networks. Figure 3 illustrates that ILD 00 yields slightly lower efficiencies but comparable purities across all tag categories, indicating that the change in VXD geometry does not dramatically affect the overall tagging capability.
In summary, the paper demonstrates that (1) careful tuning of joint‑probability parameters and subsequent neural‑network retraining can substantially improve flavour‑tagging performance; (2) the current track‑selection cuts are already fairly robust against the simulated beam‑background conditions; and (3) the ILD 00 detector concept, despite its different VXD layout, attains flavour‑tagging results comparable to those of LDCPrime 02Sc when using the same neural‑network models. The authors conclude that further optimisation—such as dedicated neural‑network training for ILD 00 and the exploration of additional background‑mitigation variables (e.g., timing information)—will be essential for achieving the highest possible tagging performance in the final ILC detector configuration.
Comments & Academic Discussion
Loading comments...
Leave a Comment