Robust Stochastic Chemical Reaction Networks and Bounded Tau-Leaping
The behavior of some stochastic chemical reaction networks is largely unaffected by slight inaccuracies in reaction rates. We formalize the robustness of state probabilities to reaction rate deviations, and describe a formal connection between robust…
Authors: David Soloveichik
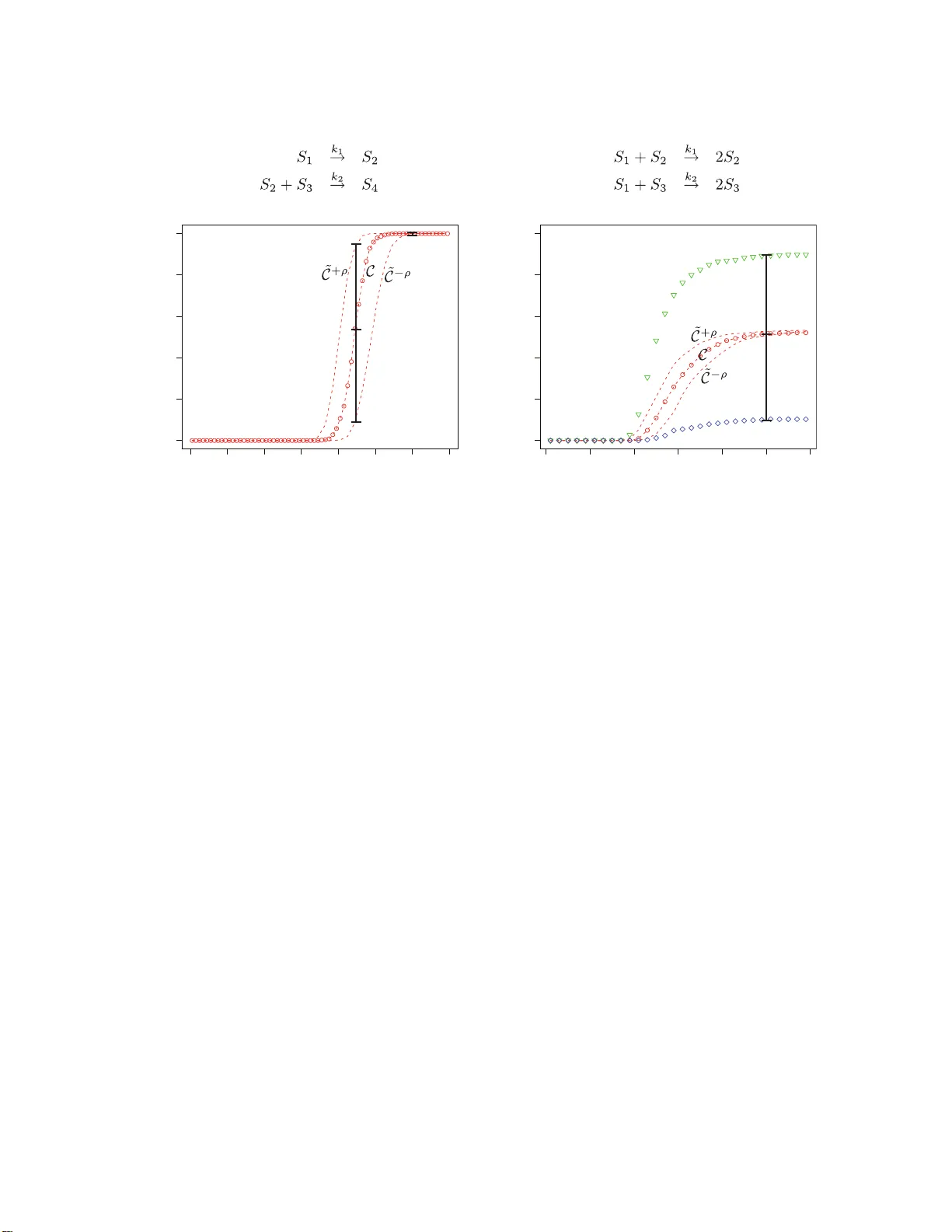
Robust Sto c hastic Chemical Reaction Net w orks and Bounded T au-Leaping Da vid Solo veic hik ∗ dsolov@calt ech.edu Abstract The behavior o f so m e sto c hastic chemical reaction netw or ks is largely unaffected by slight inaccur acies in reactio n r ates. W e formalize the robustness o f state probabilities to reaction rate deviations, and describe a formal connection b etw een robustness and efficiency of simulation. Without robustness guar antees, sto chastic simulation seems to require computational time pro po rtional to t he total num b er of reaction event s. Even if the co ncentration (molecular count per v olume) stays b ounded, the n umber of reac- tion events can b e linea r in the duration o f simulated time and total molecula r count. W e show that the b ehavior o f robust s ystems can b e predicted s uch that the compu- tational work scales linearly with the duratio n of simulated time and concentration, and o nly po lylogar ithmically in the total molecular count. Th us our asymptotic anal- ysis captur e s the dramatic sp eedup when molecula r c ounts a re large , and shows that for b ounded c oncentrations the computation time is essentially in v aria n t with molecu- lar count. Finally , by noticing that e ven r obust sto chastic chemical reaction netw orks are ca pable of embedding complex computationa l problems, we ar gue that the linear depe ndence o n sim ulated time a nd co ncent r ation is likely optimal. 1 In tro d uction The sto chastic c hemical reaction net work (SCRN) m o del of c hemical kinetics is used in c hemistry , physic s , a n d computational biology . It describ es inte r actions inv olving inte - ger n u m b er of molecules as Mark o v ju mp pro cesses (McQuarrie, 1967; van Kamp en, 1997; ´ Erdi & T´ oth, 1989; Gillespie, 1992), and is used in domains wh ere the traditional mo del of deterministic con tinuous mass a ction kinetics is in v alid due to small mol ecular counts. Small molecular coun ts are pr ev alen t in biology: for example, o ve r 80% of the genes in the E. c oli c hromosome are expressed at f ew er than a hundred copies p er cell, with some k ey con trol factors present in quan tities under a d ozen (Guptasarma, 1995; Levin, 1999). Indeed, exp er- imen tal observ ations and computer sim ulations ha ve confirmed that stoc hastic effects can b e physio logically significan t (McAdams & Arkin , 1997; Elo w itz et al., 2002; Suel et al., 2006). Consequent ly , the sto chastic mo del is w idely emp lo y ed for m o deling cellular pro cesses (e.g., Arkin et al. (1998)) and is included in numerous soft ware pac k ages (V asudev a & Bhalla , ∗ Department of CNS , California Institute of T echnology , Mail Co de 136-93, Pasa d ena, CA 91125-9300, USA. V oice: (626) 395-5707, F ax: (626) 584-0630 1 2004; K ierzek, 2002 ; Adalsteinsson et al., 2004). ∗ The stochastic mo del b ecomes equ iv alen t to the classica l la w of mass actio n when the molecular counts of all participati n g sp ecies are large (Ku rtz, 1972; Ethier & Kurtz, 1986). Gillespie’s sto chastic simulat ion algorithm (SSA) can b e used to mo del the b ehavio r of S C RNs (Gillespie, 1977). Ho we ver, simulati on of systems of inte r est often requ ires an unfeasible amount of computatio nal time. Some work has fo cused on optimizing sim ulation of large S CRNs — many different sp ecies and reaction c h annels. F or example, certain tr icks can impro ve the s p eed of deciding whic h reaction occurs next if there are m an y p ossible c hoices (e.g., Gibs on & Bruc k (2000)). Ho wev er, for the p urp oses of this pap er we supp ose that the num b er of sp ecies and reactions is relativ ely small, and that it is fundamenta lly the num b er of reactio n o ccurrences in a giv en in terv al of time that presen ts the difficulty . Because SS A simula tes ev ery single r eaction ev ent, sim u lation is slo w when the num b er of reaction ev ents is large. On the face of it, sim u lation sh ould b e p ossib le without explicitly mo deling ev ery reac- tion o ccurr ence. In th e mass action limit, fast s im ulation is ac hiev ed using numerical ODE solv ers. The complexit y of the simulatio n d o es not scale at all with the actual num b er of reaction o ccur r ences b u t with ov erall sim ulation time and the concen tr ation of the sp ecies. If the v olume gets larger w ithout a significan t increase in concen tration, mass action O DE solv ers achiev e a p rofound difference in compu tation time compared to SSA. † Moreo v er maxim um concen tration is essen tially alwa y s b ound ed, b ecause th e mo d el is only v alid f or solutions dilute en ough to b e well mixed, and ultimately b ecause of the finite densit y of matter. Ho wev er, mass action sim u lation can only b e applied if molecular counts of al l the sp ecies are large. Eve n one sp ecies th at main tains a lo w m olecular count and in teracts with other sp ecies preve n ts the use of mass action ODE solv ers. Another reason why it seems that it should b e p ossible to simula te sto c h astic c h emical systems quickly , is that for man y systems the b eha vior of inte r est d o es not d ep end cru cially up on details of ev ents. F or example bio c hemical net works tend to b e r obust to v ariations in concen tr ations and kin etic p arameters (Morohashi et al., 2002; Alon, 2007). If these systems are robust to many kinds of p erturbations, includ ing slopp iness in s imulation, can w e tak e adv an tage of this to sp eed up sim u lation? F or example, can w e approac h the sp eed of ODEs b ut allo w molecular counts of some sp ecies to b e small? Indeed, tau-leaping algorithms (e.g ., Gillespie (2001 ); Rathin am et al. (20 03 ); Cao et al. (2006), see Gillespie (2007) for a review) are b ased on the idea that if we allo w r eaction pr op ensities to r emain constan t for some amoun t of time τ , b ut therefore deviate slightly from their correct v alues, w e d on’t hav e to explicitly sim ulate ev ery reaction that o ccurs in this p erio d of time (and can th u s “leap” by amount of time τ ). In this pap er w e formally define r obustness of the probabilit y that the sy s tem is in a certain s tate at a certain time to p ertur bations in r eaction pr op ensities. W e also pro v id e a metho d f or pro vin g that certain simple systems are robu s t. W e then d escrib e a n ew appro x- ∗ Some stochastic simulation implemen tations on the web: Systems Biology W ork- b ench: http://sbw .sourceforge.net ; BioSpice: http://biospice.l bl.gov ; Sto cha- stirator: http://opn srcbio.molsci.org ; STOCKS: http://www .sysbio.pl/stocks ; BioNetS: http://x.a math.unc.edu:16080 /BioNetS ; SimBiology pack age for MA TLAB: http://www .mathworks.com/pro ducts/simbiology/index.html † As an illustrativ e example, a proka ryotic cell and a euk aryotic cell may h a ve similar concentrations of proteins but va stly different volumes. 2 imate sto chastic simulatio n alg orithm called b oun ded tau-leaping (BTL), wh ic h naturally follo ws from our definition of robustness, and pr o v ably provides correct an s w ers for robust systems. In con trast to Gillespie’s and others’ v ersions of tau-leaping, in eac h step of our algorithm the leap time, rather than b eing a fu nction of the curr en t state, is a rand om v ariable. Th is algorithm n aturally av oids some pitfalls of tau-leaping: the concent r ations cannot b ecome negativ e, and th e alg orithm scales to SSA when necessary , in a wa y that there is alw ays at least one reaction p er leap. Ho wev er, in the cases when th ere are “opp os- ing reactions” (canceling or partially cancelling eac h other) other f orms of tau-leaping may b e significan tly faster (e.g., Rathinam & El Samad (2007)). BTL seems more amenable to theoretical analysis than Gillespie’s v ersions (Gill esp ie, 2001, 2003; Cao et al., 200 6 ), and ma y thus act as a stand -in for app ro ximate sim ulation algorithms in analytic in ve s tigations. In this pap er we use the language and to ols of com- putational complexit y theory to formally stud y ho w the num b er of leaps that BTL tak es v aries with th e maxim u m molecular count m , time span of the sim u lation t , and volume V . In lin e with the basic computational complexit y paradigm, our analysis is asymptotic and worst-ca se. “Asymptotic” means that we do not ev aluate the exact n u m b er of leaps but rather lo ok at the fun ctional form of the dep endence of their num b er on m , t , and V . This is easier to deriv e and allo ws for m aking fund amen tal distinctions (e.g ., an exp onen tial function is fundament ally larger than a p olynomial function) without getting lost in the details. “W orst-case” means that we will not stud y the b ehavio r of our algorithm on any particular c hemical system but rather upp er-b ound the num b er of leaps our algorithm tak es indep end en t of the chemical system. This will allo w us to kn o w that n o matter what the system we are tryin g to sim u late, it will n ot b e w ors e than our b ound. In this computational complexit y paradigm, w e show that in d eed robus tn ess helps. W e pro ve an up p er b ound on the num b er of steps our algorithm tak es that is loga rithmic in m , and linear in t and total concen tration C = m/V . This can b e contrasted with th e exact SSA algorithm w h ic h, in the worst case, tak es a num b er of steps that is linear in m , t , and C . S ince a logarithmic dep endence is m u ch smaller than a linear one, BTL is prov ably “closer” to the sp eed of ODE solv ers for mass act ion systems whic h hav e no dep endence on m . ∗ Finally we ask whether it is p ossible to impro ve up on BTL for robu st systems, or did w e exhaust the sp eed gains that can b e obtained due to robu stness? In the last secti on of the p ap er w e connect th is qu estion to a conjecture in computer science that is b eliev ed to b e true. With this conjecture we pro ve that th ere are r obust systems whose b eha vior cannot b e predicted in few er computational steps than the n umb er of leaps that BTL make s , ignoring m u ltiplicativ e constan t factors and p o wers of log m . W e b eliev e other v ersions of tau-leaping ha v e similar w orst-case complexities as our alg orithm , b u t pro ving equiv alen t results for them remains op en. ∗ Indeed, th e total molecular count m can b e ex tremely large compared t o its logarithm — e.g., Avo- gadro’s num b er = 6 × 10 23 while its log 2 is only 79. 3 2 Mo d el and Definitions A Sto chastic Chemic al R e action N e twork (SCRN) S sp ecifies a s et of N sp e cies S i ( i ∈ { 1 , . . . , N } ) and M r e actions R j ( j ∈ { 1 , . . . , M } ). The state of S is a ve ctor ~ x ∈ N N indicating the in tegral molecular coun ts of the sp ecies. ∗ A r eaction R j sp ecifies a reactan ts’ stoic hiometry vecto r ~ r j ∈ N N , a p ro ducts’ stoic h iometry v ector ~ p j ∈ N N , and a r eal-v alued rate constan t k j > 0. W e describ e reaction stoic hiometry using a standard c hemical “arro w” notation; for example, if there are three sp ecies, the reaction R j : S 1 + S 2 → S 1 + 2 S 3 has reactan ts v ector ~ r j = ( − 1 , − 1 , 0) and pro d ucts ve ctor ~ p j = (1 , 0 , 2). A reaction R j is p ossible in state ~ x if there are enough react ant molecules: ( ∀ i ) x i − r ij ≥ 0. Then if react ion R j o ccurs (or “fires”) in state ~ x , the state c h anges to ~ x + ~ ν j , where ~ ν j ∈ Z N is th e state c hange v ector for reaction R j defined as ~ ν j = ~ p j − ~ r j . W e follo w Gillespie and others and allo w unary ( S i → . . . ) and bimolecular (2 S i → . . . or S i + S i ′ → . . . , i 6 = i ′ ) r eactions only . Sometimes the m o del is extended to higher-order reactions (van Kamp en, 1997), but the merit of th is is a matter of some contro v ersy . Let us fix an S CRN S . Give n a starting state ~ x 0 and a fixed vo lu me V , w e can defin e a con tinuous-time Marko v p ro cess w e call an SSA pr o c ess † C of S according to the f ollo wing sto c hastic kinetics. Giv en a current state ~ x , the prop ensit y function a j of r eaction R j is defin ed so that a j ( ~ x ) dt is the probability that one R j reaction will o ccur in th e next infinitesimal time in terv al [ t, t + dt ). If R j is a unimolecular r eaction S i → . . . then the prop ens it y is p rop ortional to th e num b er of molecules of S i currentl y present s ince eac h is equally likely to react in the next time instant ; sp ecifically , a j ( ~ x ) = k j x i for reaction rate constan t k j . If R j is a bimolecular reaction S i + S i ′ → . . . , where i 6 = i ′ , then the r eactio n prop ens it y is p rop ortional to x i x i ′ , whic h is the num b er of wa ys of choosing a m olecule of S i and a molecule of S i ′ , since eac h p air is equally like ly to react in the next time instant . F urther, the probability that a particular pair reacts in the next time ins tant is inv ersely prop ortional to the v olum e, resulting in the prop en sit y function a j ( ~ x ) = k j x i x i ′ V . If R j is a bimolecular reaction 2 S i → . . . then the num b er of wa ys of choosing t wo molecules of S i to react is x i ( x i − 1) 2 , and the prop en s it y function is a j ( ~ x ) = k j x i ( x i − 1) 2 V . Since the pr op ensit y function a j of reaction R j is d efi ned so that a j ( ~ x ) dt is the pr ob a- bilit y that one R j reaction will o ccur in the n ext infinitesimal time interv al [ t, t + dt ), state transitions in the SSA pro cess are equiv alen tly d escrib ed as follo ws: If the sys tem is in state ~ x , no further reactio n s are p ossible if P a j ( ~ x ) = 0. Otherwise, the time un til the next reaction o ccurs is an exp onenti al rand om v ariable with r ate P j α j ( ~ x ). The probabilit y that next reaction will b e a particular R j ∗ is α j ∗ ( ~ x ) / P j α j ( ~ x ). W e are in terested in p redicting the b ehavi or of SSA pr o cesses. While there are p oten- tially man y differen t questions that we could b e tr y in g to answer, for sim p licit y we define the pr e diction pr oblem as follo ws. Giv en an SS A p ro cess C , a time t , a state ~ x , and δ ≥ 0, predict ‡ whether C is in ~ x at time t , suc h that the probabilit y that th e prediction is incor- ∗ N = { 0 , 1 , 2 , . . . } and Z = { . . . , − 1 , 0 , 1 , . . . } . † It is exactly the sto c hastic pro cess simula ted by Gilles p ie’s St ochastic Sim u lation Algorithm (SSA) (Gillespie, 1977). ‡ W e phrase th e prediction problem in terms appropriate for a sim ulation algori thm. An alternative form ulation would b e the problem of estimating the probability that the SSA process is in ~ x at time t . T o b e able to solve this problem using a simulation algorithm w e can at most require that with probabilit y at least δ 1 the estimate is within δ 2 of the tru e p robabilit y for some constants δ 1 , δ 2 > 0. This can b e attained 4 rect is at most δ . In other w ord s w e are in terested in algorithmically generating v alues of a Bernoulli rand om v ariable I ( ~ x, t ) suc h that the p robabilit y that I ( ~ x, t ) = 1 w hen C is not in ~ x at time t plu s the probabilit y that I ( ~ x, t ) = 0 when C is in ~ x at time t is at most δ . W e assume δ is some small p ositiv e constan t. W e can easily extend th e pr ediction problem to a set of states Γ rather than a s ingle target state ~ x by asking to p redict whether the pro cess is in any of the states in Γ at time t . Since Γ is mean t to captur e some qualitativ e feature of the S SA pro cess that is of interest to us, it is called an outc ome . By decreasing the v olume V (wh ic h sp eeds u p all bim olecular r eactions), increasing t , or allo wing for more molecules (up to some b oun d m ) we are increasing the num b er of reaction o ccurrences that w e ma y n eed to consider. Thus for a fixed SC RN, one can try to u pp er b ound the computational complexit y of the pred iction prob lem as a fun ction of V , t , and m . Giv en a molecular count b ound m , w e define the b ounde d-c ount pr e diction pr oblem as b efore, but allo wing an arbitrary answ er if the molecular count exceeds m within time t . Su pp ose P is a b ound ed-coun t prediction pr ob lem with molecular count b ound m , error b ound δ , ab out time t and an SSA pro cess in which the v olume is V . W e then say P is a ( m, t, C , δ ) - pr e diction pr oblem where C = m/V is a b ound on the maxim um concentrat ion. ∗ Fixing some small δ , w e stud y ho w the compu tational complexity of solving ( m, t, C , δ )-prediction problems ma y scale w ith in creasing m , t , and C . If th e ( m, t, C, δ )-prediction problem is regarding an outcome Γ consisting of multi ple states, w e require the problem of deciding whether a particular state is in Γ to b e easily solv able. Sp ecifically w e requir e it to b e solv able in time at most p olylogarithmic in m , w h ic h is true for an y natural pr oblem. It has b een observ ed that p erm itting p rop ensities to deviate sligh tly from their correct v alues, allo ws for muc h faster s im ulation, esp ecially if the molecular counts of some sp ecies are large. Th is idea forms the basis of app ro ximate sto c hastic sim ulation algorithms suc h as tau-leaping (Gillespie, 2001). As opp osed to th e exact SSA p ro cess d escrib ed ab o v e, consider letting th e pr op ensity function v ary sto c h astically . Sp ecifically , w e define new prop ens it y fu nctions a ′ j ( ~ x, t ) = ξ j ( t ) a j ( ~ x ) where { ξ j ( t ) } are random v ariables indexed by reaction and time. The v alue of ξ j ( t ) describ es the d eviation from the correct pr op ensit y of reaction R j at time t , and shou ld b e close to 1. F or any SS A pro cess P we can defin e a new sto c hastic pr o cess called a p e rturb ation of P thr ou gh the c h oice of the distributions of { ξ j ( t ) } . Note th at the n ew pro cess may not b e Mark o v, and ma y n ot p ossess Po iss on transition probabilities. If there is a 0 < ρ < 1 such that ∀ j, t , (1 − ρ ) ≤ ξ j ( t ) ≤ (1 + ρ ), then we call th e new pr o cess a ρ -p erturb ation . There may b e systems exhibiting b eha vior suc h that any sligh t inexactness in the calculation of p rop ensities quickly gets amplified and results in qualitativ ely differen t b eha vior. Ho w eve r , for some pro cesses, if ρ is a small constan t, th e ρ -p erturbation may b e a go o d approximat ion of the SSA p ro cess. Th at a ρ - p ertur b ation is b ound ed multiplic ative ly (i.e., that ξ j ( t ) acts multiplicativ ely) corresp onds to our intuiti ve notion that prop ortionally larger d eviations are required to h a v e an effect if the affected prop ensit y is large. W e no w define our notion of robustness. Intuitiv ely , we wan t the prediction problem to not b e affected ev en if r eaction pr op ensities v ary sligh tly . F ormally , w e sa y an SS A pro cess C i s ( ρ, δ ) -r obust w ith resp ect to state ~ x at time t if for any ρ -deviating pro cess ˜ C based by runn ing th e simulation algorithm a constan t number of times. ∗ Maxim u m concentrati on C is a more natural measure of complexity compared to V b ecause similar to m and t , comput ational complexit y increases as C increases. 5 on C , th e probabilit y of b eing in ~ x at time t is w ithin plus or minus δ of the corresp ond ing probabilit y for C . This definition can b e extended to an outcome Γ similar to the defin ition on th e pred iction problem. Finally w e sa y an SSA pro cess C is ( ρ, δ ) - r obust with r e sp e ct to a pr e diction pr oblem (or b oun ded-count prediction problem) P if C is ( ρ, δ )-robust with resp ect to the same state (or outcome) as sp ecified in P , at the same time t as sp ecified in P . F or simplicit y , we often use asymptotic notation. Th e notation O (1) is us ed to denote an unsp ecified p ositiv e constan t. This constant is p oten tially different ev ery time the expression O (1) app ears. 3 Robustness Examples In this section w e elucidate our notion of robustness by considering some examples. In gen- eral, th e question of whether a give n SSA p ro cess is ( ρ, δ )-robust for a p articular outcome seems a diffi cu lt one. The problem is esp ecially hard b ecause w e ha ve to consider eve r y p ossible ρ -p erturbation — th us we may not ev en b e able to giv e an appro x im ate charact er- ization of r obustness by sim ulation w ith SSA. Ho wev er, we can c haracterize the robu stness of certain (simple) systems. F or an SSA pro cess or ρ -p ertur b ation C , and outcome Γ, let F Γ ( C , t ) b e the probabilit y of b eing in Γ at time t . Consider the SCRN sh o wn in Figure 1(a). W e start with 300 molecules of S 1 and S 3 eac h, and are inte r ested in the outcome Γ of having at lea st 150 molecules of S 4 . The dashed line with circles sho ws F for the correct SSA pro cess C . (All plots of F are estimated fr om 10 3 SSA runs.) T he tw o dashed lines without circles sho w F for tw o “extremal” ρ -p ertur bations: ˜ C + ρ with constan t ξ j ( t ) = 1 + ρ , and ˜ C − ρ with constan t ξ j ( t ) = 1 − ρ . What can w e sa y ab out other ρ -p erturb ations, particularly where the ξ j ( t ) hav e muc h more complicat ed d istributions? I t turns out that for this SCRN and Γ, w e can p ro ve that any ρ -p erturbation f alls within the b ounds set b y the t wo extremal ρ -p erturbations ˜ C − ρ and ˜ C + ρ . Thus F for an y ρ -p ertu rbation falls within the dashed lines. F o r mally , C is monotonic with resp ect to Γ u sing th e d efinition of m onotonicit y in Ap p endix A.3. This is easily prov en b y Lemma A.5 b ecause ev ery sp ecies is a reactan t in at most one reaction. Then by Lemma A.4, F Γ ( ˜ C − ρ , t ) ≤ F Γ ( ˜ C , t ) ≤ F Γ ( ˜ C + ρ , t ) for any ρ -p erturb ation ˜ C . T o s ee how the robustness of this system can b e quan tified using our definition of ( ρ, δ )- robustness, first consid er t wo time p oin ts t = 4 . 5 and t = 6. A t t = 4 . 5, the pr obabilit y that the correct SSA pro cess C has pr o duced at least 150 m olecules of S 4 is sligh tly more than 0 . 5. The corresp ond ing probability for ρ -p ertu rbations of C can b e no larger than about 0 . 95 and no s maller than ab out 0 . 1. Thus C is ( ρ, δ )-robust with resp ect to outcome Γ at time t = 4 . 5 for ρ = 0 . 1 and δ app ro ximately 0 . 45, bu t not for smaller δ . On th e other hand at t = 6, the dashed lines are essentiall y on top of eac h other, resulting in a tiny δ . In f act δ is sm all for all times less than ap p ro ximately 3 . 5 or greater th an app ro ximately 5 . 5. What in formation did we need to b e able to measure ( ρ, δ )-robustness? Pro cesses ˜ C − ρ and ˜ C + ρ are simp ly C scaled in time. Thus kno win g ho w F Γ ( C , t ) v aries with t allo ws one to quan tify ( ρ, δ )-robu stness at the v arious times; F Γ ( C , t ) can b e estimated from m u ltiple S SA runs of C as in Figure 1. Intuiti v ely , C is ( ρ, δ )-robus t for small δ at all times t when F Γ ( C , t ) do es not c h an ge quickly with t (see App endix A.3). F or systems that are not monotonic, 6 0.0 0.5 1.0 1.5 2.0 2.5 3.0 0.0 0.2 0.4 0.6 0.8 1.0 Time Probability of at least 160 molecules of S 2 0 1 2 3 4 5 6 7 0.0 0.2 0.4 0.6 0.8 1.0 Time Probability of at least 150 molecules of S 4 b) a) Figure 1 : Examples of SCRNs exhibiting co ntrasting degrees of robustness. The SSA pro ce ss C and o utcome Γ a re defined for the tw o sys tems by: (a) Rate constants: k 1 = 1, k 2 = 0 . 001; sta r t state: ~ x 0 = (300 , 0 , 300 , 0 ); outcome Γ: x 4 ≥ 1 50. (b) Rate co ns tants: k 1 = 0 . 01, k 2 = 0 . 01; start state: ~ x 0 = (3 00 , 10 , 10); outcome Γ: x 2 ≥ 1 60. Plots show F Γ ( · , t ) for a n SSA pro ces s or ρ -p erturbation estimated from 10 3 SSA runs. (Dashed line with circles) O riginal SSA pro cess C . (Dashed lines witho ut circ le s) The tw o extremal ρ -p erturbatio ns: ˜ C + ρ with cons tant ξ j ( t ) = 1 + ρ , and ˜ C − ρ with constant ξ j ( t ) = 1 − ρ . F or SCRN (b) w e als o plot F Γ ( · , t ) for a ρ -p erturbation with constant ξ 1 ( t ) = 1 + ρ , ξ 2 ( t ) = 1 − ρ (triangles), o r constant ξ 1 ( t ) = 1 − ρ , ξ 2 ( t ) = 1 + ρ (diamonds). Perturbation para meter ρ = 0 . 1 thr o ughout. kno win g ho w F Γ ( C , t ) v aries with time ma y not h elp with ev aluating ( ρ, δ )-robustness. Indeed, for a con trasting example, consider the SCRN in Figure 1(b ). W e start with 300 molecules of S 1 , 10 molecules of S 2 , and 10 molecules of S 3 , and we are in terested in the outcome of ha ving at least 160 molecules of S 2 . Since S 1 is a reacta nt in b oth reactions, Lemma A.5 cannot b e used. In fact , the figure sho w s t wo ρ -p ertur bations (triangles and diamonds) that clearly escap e fr om the b oundaries set by the dashed lines. T he triangles sho w F for the ρ -p erturbation where the fi rst reaction is maximally s p ed up and the second reaction is maximally slo wed d o wn. (Vice versa for the d iamonds.) F or charact er ization of the r ob u stness of this sys tem via ( ρ, δ )-robustness, consider th e time p oin t t = 2 . 5. T h e probabilit y of having at least 160 molecules of S 2 in the correct SS A pro cess C is around 0 . 5. Ho we ver, this probabilit y for ρ -p erturb ations of C can deviate by at least appr o ximately 0 . 4 up ward and do wnw ard as seen b y the tw o ρ -p erturbations (triangle s and diamonds). Th us at this time the system is not ( ρ, δ )-robust for δ appr o ximately 0 . 4. What ab out other ρ -deviations? It turns out that for this particular system, the t wo ρ -per tu rbations corresp ondin g to the triangles an d diamonds b ound F in the same wa y that ˜ C − ρ and ˜ C + ρ b ound ed F in th e fi rst example (exercise left to the reader). Nonetheless, for general systems that are not monotonic it is not clear ho w one can find s uc h b oun ding ρ -p erturb ation and in f act they lik ely w ould n ot exist. 7 Of course, there are other typ es of S SA p ro cess that are not lik e either of the ab o ve examples: e.g., systems that are robust at man y times bu t not monotonic. General wa ys of ev aluating robustn ess of such systems remains an imp ortant op en pr oblem. Finally , it is imp ortant to note that qu an tifying th e robu stness of SS A p r o cesses, ev en monotonic on es, seems to requir e computing many S SA ru ns. This is self-defeating when in practice one w an ts to show that the giv en SSA pro cess is ( ρ, δ )-robust in ord er to justify th e use of an appr oximate simulatio n algorithm to quic kly sim u late it. In these cases, we ha ve to consider ( ρ, δ )-robu stness a theoretical notion only . Note, ho wev er, that it ma y b e m u c h easier to s ho w that a system is not r obust by comparing the sim ulation ru ns of different ρ -p erturb ations, since the r uns can b e qu ickly obtained using fast app ro ximate simulati on algorithms suc h as that present ed in th e next section. 4 Bounded T au-L eaping 4.1 The Algorithm W e argued in th e Introd uction that sloppiness can allo w for faster simulat ion. In th is section w e giv e a new appro xim ate sto chastic sim ulation algorithm called b ounde d tau- le aping (BTL) th at simulate s exactly a certain ρ -p erturbation rather than the original SSA pro cess. Consequently , the algorithm solve s the prediction pr oblem with allo wed error δ for ( ρ, δ )-robust SSA pro cesses. The algorithm is a v arian t of existing tau-leaping algorithms (Gillespie, 2007). How ev er, while other tau-lea ping algorithms hav e an implicit notion of robustness, BTL is formally compatible with our explicit definition. As we’l l see b elo w, our algorithm also has certain other adv anta ges o v er many p revious tau-leaping implemen tations: it naturally disallo ws negativ e concen trations and scales to SS A in a manner that there is alwa ys at least one reaction p er leap. It also seems easier to analyze formally; obtaining a result similar to Theorem 4.1 is an op en question for other tau-leaping v arian ts. BTL h as o ve r all form t ypical of tau-leaping algorithms. Rather than sim u lating every reaction o ccur r ence explicitly as p er the S SA, BTL d ivides th e sim u lation into leaps wh ic h group m u ltiple reaction eve nts. T he p rop ensities of all of the reactio n s are assumed to b e fixed throughout the leap. This is ob viously an approxi mation since eac h reaction ev ent af- fects molecular count s and therefore the prop en s ities. How ev er, this app ro ximation is useful b ecause sim u lating the system with the assump tion that prop ensities are fixed turns out to b e m u c h easier. Ins tead of ha vin g to draw rand om v ariables for eac h reactio n o ccurrence, the num b er of r andom v ariables dra wn to determine h o w m an y reaction firings o ccurr ed in a leap is in dep end en t of the num b er of reaction fi rings. Thus we effectiv ely “leap” o ver all of th e reactions within a leap in few computational steps. If molecular counts do not c hange b y m u c h within a leap then the fixed pr op ensities are close to th eir correct SS A v alues and the approxima tion is go o d . Our defi n ition of a ρ -p erturbation allo ws us to formally define “go o d”. W e w ant to guar- an tee th at th e appro x im ate pr o cess that tau-leaping actually simulates is a ρ -p erturb ation of the exac t SSA p r o cess. W e can ac hiev e this as follo ws. If ~ x is the state on whic h the leap started, th roughout the leap the sim u lated reaction p rop ensities are fixed at their SSA p rop ensities on ~ x : a j ( ~ x ). Then for an y state ~ y within the leap we wan t the cor- 8 rect SSA pr op ensities a j ( ~ y ) to s atisfy the follo w in g ρ -p erturb ation c onstr aint (0 < ρ < 1): (1 − ρ ) a j ( ~ y ) ≤ a j ( ~ x ) ≤ (1 + ρ ) a j ( ~ y ). As so on as w e reac h a state ~ y for which this constrain t is violated, we start a n ew leap at ~ y which will use simulate d reaction p rop ensities fix ed at a j ( ~ y ). This ensures that at an y time in the simulat ion, there is some (1 − ρ ) ≤ ξ j ( t ) ≤ (1 + ρ ) suc h that multiplying the correct SSA prop ensit y of reaction R j b y ξ j ( t ) yields the p rop en- sit y of R j that the sim ulation algorithm is actually us in g. Therefore, we actually simulate a ρ -p erturb ation, and for ( ρ, δ )-robu st SSA pro cesses, the algorithm can b e used to pro v ably solv e the p r ediction problem with error δ . Can w e implement this sim ulation quickly , and, as promised, do little computation p er leap? Note that in order to limit the maxim um prop ensit y deviation in a leap, w e n eed to mak e the leap dur ation b e a rand om v ariable dep endent up on the sto c h astic ev ents in th e leap. If we ev aluate a j ( ~ y ) after eac h reaction o ccurrence in a leap to verify the satisfaction of the ρ -p erturbation constraint, w e do n ot sa v e time o ver S SA. How ev er, w e can a v oid this b y u sing a stricter constraint we call the { ε ij } -p erturb ation c onstr aint (0 < ε ij < 1), defin ed as follo ws. If the leap starts in state ~ x , reaction R j is allo wed to change the molecular count of sp ecies S i b y at most plus or m in u s ε ij x i within a leap. Again, as so on as we r eac h a state ~ y where this constraint is v iolated, we start a new leap at ~ y . ∗ F or an y ρ , we can fin d a set of { ε ij } b oun d s suc h that satisfying the { ε ij } -p erturbation constrain t satisfies the ρ -p erturbation constrain t. I n App en d ix A.1 we sho w that for an y SCRN, the ρ -p ertur bation constrain t is satisfied if ε ij ≤ 3 4 M (1 − q 1+ ρ/ 9 1+ ρ ), wher e M is the n u m b er of r eactions in the S CRN. Sim u lating a leap such that it satisfies the { ε ij } -p erturbation constrain t is easy an d only requires dra wing M gamma and M − 1 bin omial r andom v ariables. Supp ose the leap starts in state ~ x . F or eac h reaction R j , let b j b e the n um b er of times R j needs to fir e to cause a violation of the { ε ij } b ounds for some sp ecies. Th us b j is the smallest p ositiv e in teger suc h that | b j ν ij | > ε ij x i for some S i . T o determine τ , the du ration of the leap, we do the follo wing. First w e determine wh en eac h reaction R j w ould o ccur b j times, by drawing from a gamma distribu tion with shap e parameter b j and rate parameter a j . This generates a time τ j for eac h r eaction. The leap ends as so on as some reaction R j o ccurs b j times; thus to determine the duration of the leap τ w e take the minim u m of the τ j ’s. A t this p oin t we kno w that the fir st-violating reaction R j ∗ — the one with the minimum τ j ∗ — o ccurred b j ∗ times. But w e also need to kn o w h o w many times the other reactions o ccur. Consider any other reaction R j ( j 6 = j ∗ ). Give n th at th e b j th o ccurrence of reaction R j w ould h av e happ en ed at time τ j had the leap not end ed, we need to d istr ibute the other b j − 1 o ccur rences to determine how m an y h app en b efore time τ . The num b er of o ccurrences at time τ is given b y the binomial distr ibution with num b er of trials b j ( ~ x ) − 1 and success prob ab ility τ / τ j . This enables us to define BTL as s h o wn in Figure 2 . The algorithm is called “b ounded” tau-leaping b ecause the deviations of reaction p rop en- sities within a leap are alw a ys b ound ed according to ρ . Th is is in con trast with other tau-leaping algorithms, s uc h as Gillespie’s (Cao et al., 2006), in whic h th e d eviations in reaction prop ensities are sm all with high probabilit y , but not alw ays, and in fact can get ∗ An added b en efit of providing { ε ij } b ounds rather than ρ as a parameter to the BTL algorithm is that it allo ws flex ibilit y on the part of the user to assign less resp onsibilit y for a violation to a reaction that is exp ected to be fast compared t o a reaction that is exp ected to b e slo w. This may p otentia lly speed up the sim u lation, while still preserving th e ρ -p ertu rbation constraint. 9 0. Initialize with time t = t 0 and the sy s tem’s state ~ x = ~ x 0 . 1. With the system in state ~ x at time t , ev aluate all the prop ensities a j , and determine firing b oun ds b j for all p ossib le reactions, wh ere b j is the smallest p ositiv e intege r suc h that | b j ν ij | > ε ij x i for s ome S i . 2. Generate violating times τ j ∼ Gamma( b j , a j ) for all p ossible reactions. 3. Find the firs t-violati n g reaction an d set the step size to the time of the fir s t viola- tion: let j ∗ = argmin j { τ j } and τ = τ j ∗ . 4. Determine the num b er of times eac h p ossible reaction o ccurred in interv al τ : for j 6 = j ∗ , n j ∼ Binomial( b j − 1 , τ /τ j ); for j ∗ , n j ∗ = b j ∗ . 5. Effect the leap by replacing t ← t + τ and ~ x ← ~ x + P j ~ ν j n j . 6. Record ( ~ x, t ) as desired . Return to Step 1, or else en d the simulation. Figure 2 : The b ounded tau-leaping (BTL) algor ithm. The algorithm is given the SCRN, the initial state ~ x 0 , the volume V , and a set of pe r turbation b ounds { ε ij } > 0 . If the state a t a sp ecific time t f is des ired, the alg orithm chec k s if t + τ > t f in step (3), and if so uses τ = t f − τ , and treats all reactions as not first- violating in step (4). Gamma( n, λ ) is a gamma distribution with shape parameter n and rate pa rameter λ . Binomial( n, p ) is a binomia l distribution with num b e r of tr ials n and success pr obability p . arbitrarily h igh if the simulation is long enough. This allo ws BTL to s atisfy our defin ition of a ρ -p ertur bation, and p ermits easier analysis of the b eha vior of the algorithm (see next section). As any algorithm exactly sim ulating a ρ -p ertur bation w ould, BTL n aturally av oids negativ e concen trations. Negativ e counts can o ccur only if an imp ossible reaction happ ens — in some state ~ x reaction R j fires for whic h a j ( ~ x ) = 0. But since in a ρ -p erturbation prop ens it y deviations are m u ltiplicativ e, in state ~ x , a ′ j ( ~ x, t ) = ξ j ( t ) a j ( ~ x ) = 0 and so R j cannot o ccur. F urther, no matter how small the { ε ij } b ound s are, there is alw a ys at least one reaction p er leap and th u s BTL cannot tak e more s teps than S SA. On the negativ e side, in certain cases the BTL algorithm can tak e many more leaps than Gillespie’s tau-lea p ing (Gillespie, 2001, 2003; Cao et al., 2006 ) and other ve r sions. Consider the case w here there are tw o fast r eactions that partially und o eac h others’ effect (for example the reactions ma y b e reverses of eac h other). While b oth reactio n s ma y b e o ccurring very rapidly , their prop ensities ma y b e ve ry similar (e.g., Rathin am & El S amad (2007)). Gillespie’s tau-leaping will attempt to leap to a p oin t w here the molecular coun ts ha ve c h an ged enough according to the aver age d b eha vior of these reactions. How ev er, our algorithm considers eac h reaction separately and leaps to the p oint where the fi rst reaction violates the b ound on the change in a sp ecies in the absence of the other reactions. T h u s in this situation our algorithm w ould p erform un necessarily many leaps for the desired lev el of accuracy . 10 4.2 Upp er Bound on the Num b er of Leaps Supp ose w e fi x some SCRN of in terest, and run BTL on differen t initial s tates, v olumes, and lengths of sim ulated time. Ho w do es v arying th ese parameters c han ge th e n u m b er of leaps tak en by BTL? In this section, we pro v e that n o matter what the SCRN is, we can upp er b ound th e num b er of leaps as a fun ction of the total sim u lated time t , the vo lu me V , and the maximum total molecular coun t m encountered d u ring the sim ulation. F or simplicit y w e assume that all the ε ij are equal to some global ε . (Alt ernativ ely , the theorem and pro of can b e easily c hanged to use min/max { ε ij } v alues where appr opriate.) Theorem 4.1. F or any SCRN S with M sp e cies, any ε such that 0 < ε < 1 / (12 M ) , and any δ > 0 , ther e ar e c onstants c 1 , c 2 , c 3 > 0 such that for any b ounds on time t and total mole cular c ount m , for any volume V and any starting state, after c 1 log m + c 2 t ( C + c 3 ) le aps wher e C = m/V , either the b ound on time or the b ound on total mole cular c ount wil l b e exc e e de d with pr ob ability at le ast 1 − δ . Pr o of. The pro of is pr esen ted in App endix A.2. Note that the u pp er b ound on ε implies that the algorithm is exactly simulating some ρ -p erturb ation (see previous section). In tu itiv ely , a k ey idea in the pro of of the theorem is that th e prop ensity of a reaction decreasing a particular sp ecies is linear to the amoun t of that sp ecies (since the sp ecies must app ear as a r eactan t). This allo w s u s to b ound the decrease of an y sp ecies if a leap is sh ort. Actually this imp lies that a short leap probably increases the amount of some sp ecies by a lot (some sp ecies m ust cause a violation — if not by a decrease it m u st b e by an increase). This allo ws u s to argue th at if we hav e a lot of long leaps we exceed our time b ound t and if we ha ve a lot of short leaps w e exceed our b ound on total molec u lar count m . I n fact b ecause the effect of leaps is m ultiplicativ e, logarithmically many sh ort leaps are enough to exceed m . It is in formativ e to compare this result with exact S S A, wh ic h in the worst case tak es O (1) m t ( C + O (1)) steps, since eac h reaction o ccurr ence corresp onds to an S SA step and the maxim u m reaction p rop ensity is k j m 2 /V or k j m . Sin ce m can b e v ery large, the sp eed impro vemen t can b e pr ofound. W e b eliev e, although it remains to b e p ro ven, that other v ersions of tau-leaping (see e.g., Gillespie (2007) for a review) achiev e the same asymptotic w orst case num b er of leaps as our algorithm. Ho w muc h computation is required p er eac h leap? Eac h leap inv olv es arithmetic op er- ations on the m olecular count s of the sp ecies, as we ll as drawing from a gamma and bino- mial distrib utions. S ince there are fast algorithms for obtaining instances of gamma and binomial random v ariables (e.g., Ahren s & Dieter (1978); Kachitvic h ya nukul & Schmeiser (1988)), we do n ot exp ect a leap of BTL to require muc h more computation than other forms of tau-leaping, and should not b e a ma j or con tributor to the total r unning time. Precise b ounds are dep en d en t on the mo del of computation. (In the next section w e s tate reasonable asymptotic b ounds on the compu tation time p er leap for a r andomized T uring mac hine imp lemen tation of BTL.) 11 5 On the Computational Complexit y of the Prediction Prob- lem for Robust SSA Pro cesses What is the computational complexit y inherent in the p rediction problem for robus t SSA pro cesses? Is sim ulation with BTL a go o d pr o cedure for solving the problem, or are there faster metho ds not inv olving sim ulation that someho w directly compute d esired end-time probabilities withou t ev aluating the en tire tra jectory? W e ha ve sho w n that the num b er of leaps that BTL tak es scales at most linearly with t and C . Ho wev er, for some s ystems there are analytic sh ortcuts to determining the probability of b eing in Γ at time t . F or instance the “exp onenti al deca y” S CRN consisting of the single reaction S 1 → S 2 is easily solv able analyticall y (Malek-Mansour & Nicolis, 1975). The calculation of the probability of b eing in any giv en state at any giv en time t (among other questions) can b e solv ed in time that gro ws minimally with t and C . In deed, it ma y seem p ossible that robust SSA pro cesses are someho w b eha viorally weak and that their b ehavio r can b e easily predicted. In order to b e able to consider these questions formally , we sp ecify our mo del of com- putation as b eing r andomized T u r ing m ac hines (see b elow). W e say that compu tation time p olylogarithmic in the maxim um tot al molecular co unt m is efficient in m (in fact log m computation time is requ ir ed to simply r ead in th e initial s tate of the SSA pro cess and target state of the prediction problem). In this s ection we p ro ve that for an y algorithm efficien t in m solving prediction pr oblems for robust S SA pro cesses, there are p r ediction problems ab out suc h p ro cesses that cannot b e solved faster than lin ear in t and C . W e pro ve this result assuming a r easonable conjecture in computational complexit y theory . Then, with certain ca veats r egardin g implemen ting BTL on a T uring mac h ine, sim ulation with BTL is optimal in t and C for solving prediction pr ob lems for robu st SSA pro cesses among algorithms efficien t in m . W e use th e standard mo del of compu tation whic h captures sto c h astic b eha vior: ran- domized T ur ing machines (TM). A r andomized TM is a n on-deterministic TM ∗ allo wing m ultiple p ossible transitions at a p oint in a computation. The actual transition tak en is uniform o v er the c hoices. (See for example Sip s er (1997) for equiv alen t f ormalizatio n s.) W e sa y a giv en TM on a giv en input run s in computational time t tm if there is no set of random c hoices th at m akes the machine ru n longer. W e wan t to sho w that for some S CRNs, there is no method of solving the prediction problem fast, no m atter ho w cleve r we are. W e also w ant these s to c hastic p ro cesses to b e robust despite h a ving d ifficult p rediction problems. W e use the follo wing tw o ideas. First, a metho d b ased on Angluin et al. (2006) shows that predicting the output of give n r andom- ized TMs can b e done b y solving a pr ediction pr oblem for certain robust SS A pro cesses. Second, an op en conjecture, but one that is strongly compatible with th e basic b eliefs of computational complexit y theory , b oun d s how quic kly th e output of r andomized TMs can b e determined. Computational complexit y theory concerns measurin g ho w the computational r esources required to solv e a giv en problem s cale with input size n (in b its). T he t wo most p rev alen t efficiency measures are time and space — the num b er of TM steps and the length of the TM tap e required to p erform the computation. W e say a Bo olean function f ( x ) is pr ob a- ∗ Arbitrary fin ite num b er of states and tap es. Without loss of generalit y , w e can ass u me a b in ary alphab et. 12 bilistic al ly c omputable by a T M M in time t ( n ) (wh ere n = | x | ) and space s ( n ) if M ( x ) ru ns in time t ( n ) using space at most s ( n ), an d with pr obabilit y at least 2 / 3 outpu ts f ( x ). ∗ A basic tenet of compu tational complexit y is that allo w ing asymptotically more computation time t ( n ) alw a ys expand s the set of problems that can b e solv ed. Thus it is widely b eliev ed that for an y (reasonable) t ( n ), there are “ t ( n )-hard” functions that can b e p robabilistically computed in t ( n ) time, but n ot in asymptotically s m aller time. † F or our argument we will need suc h a t ( n )-hard fun ction, b ut one that do es not requir e to o m uch sp ace. F ormally we assume th e follo wing hier ar chy c onje ctur e : Conjecture 5.1 ((Probabilistic, Space-Limited) Time Hierarc hy) . F or any α < 1 , and p olynomials t ( n ) and s ( n ) such that t ( n ) α and s ( n ) ar e at le ast line ar, ther e ar e Bo ole an functions that c an b e pr ob abilistic al ly c ompute d within time and sp ac e b ounds b ounds t ( n ) and s ( n ) , but not in time O (1) t ( n ) α (with unr estricte d sp ac e usage). In tu itiv ely , w e tak e a Bo olean function that requires t ( n ) time and em b ed it in a chemical system in such a w ay that solving the prediction problem is equiv alen t to p robabilistically computing the fun ction. The conjecture implies that w e cannot solv e th e pr ediction prob- lem fast enough to allo w us to solve the compu tational problem faster than t ( n ). F urther, since the resulting SSA pro cess is robu s t, the resu lt lo wer-b ounds the compu tational com- plexit y of the prediction problem f or r ob u st pro cesses. Note th at we need a time hierarch y conjecture that restricts the space usage and talks ab out p robabilistic computation b ecause it is imp ossible to em b ed a TM computation in an SCR N suc h that its computation is error free (Solo v eic h ik et al., 2008), and fur ther such embed d ing seems to require more time as the space u sage increases. The follo wing theorem lo wer-boun ds th e compu tational complexit y of the pred iction problem. The b oun d holds ev en if we restrict ourselve s to r obust pr o cesses. It shows that this computatio nal complexit y is at least linear in t and C , as long as the dep endence on m is at most p olylogarithmic. It lea ve s the p ossib ilit y that ther e are algorithms for solving th e prediction problem that require computation time more than p olylogarithmic in m but less than linear in t or C . Let the prediction problem b e sp ecified by giving the SS A pro cess (via the initial state and v olume), the target time t , and th e target outcome Γ in some standard enco ding suc h th at w hether a state b elongs to Γ can b e computed in time p olylogarithmic in m . Theorem 5.1. Fix any p erturb ation b ound ρ > 0 and δ > 0 . Assuming the hier ar chy c onje ctur e (Conje ctur e 5.1), ther e is an SCRN S such that for any pr e diction algorithm A and c onstants c 1 , c 2 , β , η , γ > 0 , ther e is an SSA pr o c ess C of S and a ( m, t, C, 1 / 3) -pr e diction pr oblem P of C such that A c annot solve P i n c omputational time c 1 (log m ) β t η ( C + c 2 ) γ if η < 1 or γ < 1 . F u rther, C is ( ρ, δ ) -r obust with r esp e c t to P . Pr o of. The pro of is pr esen ted in App endix A.5. ∗ Any other constant probability b ounded a wa y from 1 / 2 will do just as wel l: t o achiev e a larger constant probabilit y of being correct, we can repeat the computation a constant num b er of times and take ma jority vote. † If we do not allo w any chance of error, th e corresp onding statement is prove n as the (deterministic) time hierarch y theorem (Sip ser, 1997). Also see Barak (2002); F ortno w & Santhanam ( 2006) for progress in proving the p rob ab ilistic v ersion. 13 In App endix A.6 , we argue that BTL on a randomized TM r u ns in total computation time O (1)((log( m )) O (1) + l ) t ( C + O (1)) where, in eac h leap, p olylogarithmic time in m is required for arithmetic manipu lation of molecular counts, and l captures the extra compu tation time requ ired for th e real n u m b er op erations and drawing from the gamma and binomial distribu tions. Here l is p oten tially a fu n ction of m , V , t , and the bits of precision u sed, but assuming efficien t metho ds for dra w in g the r andom v ariables l is likel y very sm all compared to the total num b er of leaps. Then, assuming w e can ignore errors in tro d uced due to fin ite precision arithmetic and appro ximate random num b er generation, sim ulation with BTL is an asymp toticall y optimal w ay in t and C of solving th e pr ediction pr oblem for robust p ro cesses among metho ds efficien t in m . 6 Discussion The b ehavio r of m an y sto c h astic c h emical reaction net works d o es n ot dep end crucially on getting the reaction pr op ensities exactly righ t, p rompting our definition of ρ -p erturb ations and ( ρ, δ )-robustness. A ρ -p erturbation of an S SA pr o cess is a sto chasti c pro cess with sto c hastic deviations of the reaction p rop ensities f rom their correct SSA v alues. These deviations are multiplicat iv e and b ounded b et we en 1 − ρ and 1 + ρ . If w e are concerned with h o w lik ely it is that the SS A pr o cess is in a giv en state at a given time, then ( ρ, δ )- robustness captures how far these probabilities ma y deviate for a ρ -p erturb ation. W e f ormally sho we d that predicting the b ehavio r of robus t pro cesses do es not require sim ulation of eve r y reaction ev ent. Sp ecifically , we describ ed a n ew appr oximate sim ulation algorithm calle d b ound ed tau-leaping (BTL) th at simulate s a certain ρ -p ertur bation as opp osed to the exact S SA pro cess. The accuracy of the algorithm in making pr edictions ab out the state of the s y s tem at given times is guarant eed for ( ρ, δ )-robust pro cesses. W e pro ved an upp er b ound on the n umb er of leaps of BTL that helps explain the sa vings o v er SSA. The b oun d is a f u nction of the desired length of s im ulated time t , volume V , and maxim um molecular coun t encoun tered m . This b ound scales linearly with t and C = m/V , but only logarithmically with m , while the total num b er of reactions (and th erefore SS A steps) ma y scale linearly w ith t , C , and m . When total concent ration is limited, but the total molecular count is large, th is represents a profound improv emen t o v er SSA. Because the num b er of BTL leaps scales only logarithmically with m , BTL asymptotically nears the sp eed of mass action ODE solv ers — w h ic h hav e n o dep endence on m . W e also argue that asymptotically as a function of t and C our algorithm is optimal in as far as no algorithm can ac h iev e sub linear dep en d ence of the n u m b er of leaps on t or C . Th is result is pr ov en based on a reasonable assumption in compu tational complexit y theory . Unlike Gillespie’s tau-leaping (Cao et al., 2006), our algorithm seems b etter su ited to theoretical analysis. Th us wh ile we b eliev e other versions of tau-leaping ha ve similar wo r st-case ru nning times, the results analogous to those w e ob tain for BTL r emain to b e prov ed. Our r esults can also b e seen to addr ess the follo win g question. If concerned solely with a particular outcome r ather than with the entire p ro cess tra jectory , can one alw a ys fi nd certain sh ortcuts to d etermine the probabilit y of the outcome withou t p erf orming a full 14 sim ulation? Since our lo wer b ound on computation time scales lin early with t , it could b e interpreted to mean that, except in prob lem-sp ecific cases, there is no shorter route to predicting the outcomes of sto chastic c h emical pro cesses than via sim ulation. Th is negativ e result h olds ev en r estricting to the class of robust SS A pro cesses. While the notion of r obustness is a u seful theoretical construct, ho w p ractical is our definition in deciding whether a giv en system is suitable to approximate simula tion via BTL or n ot? W e pr o ve that for the class of mon otonic SS A pro cesses, robustn ess is guaran teed at all times wh en in the SSA pro cess the outcome probabilit y is stable ov er an interv al of time determined by ρ . How ev er, it is n ot clear how this stability can b e determined w ithout SSA sim ulation. Even worse, few systems of int erest are monotonic. Consequen tly , it is comp elling to dev elop tec hn iques to establish r ob u stness for more general classes of systems. A r elated q u estion is w h ether it is p ossib le to connect our notion of robustness to previously studied notions in mass action stabilit y analysis (Horn & Jac k s on, 1972; Sontag, 2007). A App endix A.1 Enforcing the ρ -P erturbation Constr ain t by the { ε ij } -P ert urbation Constrain t Recall that in Section 4.1 we in tro duced t wo constraint s b ounding the n u m b er of r eaction ev ent s within a leap. If ~ x is the state at the b eginnin g of the leap, the ρ -p erturbation constrain t is satisfied if for every reaction R j , (1 − ρ ) a j ( ~ y ) ≤ a j ( ~ x ) ≤ (1 + ρ ) a j ( ~ y ) for any state ~ y within the leap. T he { ε ij } -p erturbation constrain t is satisfied if n o reaction R j c hanges the molecular coun t of sp ecies S i b y more than plu s or minus ε ij x i within the leap. F or a giv en ρ , w e wo u ld lik e to fin d an app ropriate { ε ij } -p erturbation constrain t to us e in the BTL algorithm suc h that w e satisfy the ρ -p erturbation constraint, thereb y ensuring that w e are exactly simulat in g s ome ρ -p erturb ation. T o a v oid making the { ε ij } -p erturbation constrain t tighte r than n ecessary requir es kno wledge of the exact reactions in the giv en SCRN. Nev ertheless, w orst-case analysis b elo w shows that setting ε ij ≤ 3 4 M (1 − q 1+ ρ/ 9 1+ ρ ) w orks for any SC R N of M reactions. If ε ij = ε then, for any SCRN with M reactio n s, th e maxim u m c hange of an y sp ecies S i within a leap allo we d b y the { ε ij } -p erturbation constrain t is p lus or min us M εx i . W e w ant to find an ε > 0 suc h that if the changes to all sp ecies s tay w ithin th e M ε b ound s, then no r eaction violates the ρ -p ertur bation constrain t. C onsider a bim olecular reaction R j : 2 S i → . . . first. The algorithm sim u lates its prop ensit y as a j ( ~ x ) = k j x i ( x i − 1) /V throughout the leap. If x i = 0 or 1, then a j ( ~ x ) = 0, and as long as M ε < 1, then still a j ( ~ y ) = 0, satisfying the ρ -p erturbation constrain t for R j . Oth er w ise, if x i ≥ 2, then the SSA prop en sit y at state ~ y within th e leap is a j ( ~ y ) = k j y i ( y i − 1) / V ≤ k j (1 + M ε ) x i ((1 + M ε ) x i − 1) / V , and so the left half of the ρ -p erturb ation constrain t (1 − ρ ) a j ( ~ y ) ≤ a j ( ~ x ) is satisfied if (1 − ρ )(1 + M ε ) x i ((1 + M ε ) x i − 1) ≤ x i ( x i − 1). Similarly , the right half of the ρ -p ertur b ation constrain t a j ( ~ x ) ≤ (1 + ρ ) a j ( ~ y ) is satisfied if (1 + ρ )(1 − M ε ) x i ((1 − M ε ) x i − 1) ≥ x i ( x i − 1). These in equalities are satisfied for x i ≥ 2 wh en ε ≤ 3 4 M (1 − q 1+ ρ/ 9 1+ ρ ) (whic h also ensur es that M ε < 1). In a likewise manner, for a u nimolecular reaction R j : S i → . . . , th e ρ -p erturbation 15 constrain t is satisfied if (1 − ρ )(1 + M ε ) x i ≤ x i and (1 + ρ )(1 − M ε ) x i ≥ x i , and for a bimolecular reaction R j : S i + S i ′ → . . . , the constrain t is satisfied if (1 − ρ )(1 + M ε ) 2 x i x i ′ ≤ x i x i ′ and (1 + ρ )(1 − M ε ) 2 x i x i ′ ≥ x i x i ′ . It is easy to see that setting ε as ab o ve also satisfies the inequalities for these reaction t yp es. Throughout the pap er w e assum e that ρ , ε or { ε ij } are fixed and most of our asymptotic results do n ot show dep endence on these parameters. Nonetheless, we can show that for a fixed S CRN and for small enough ρ , ε can b e within the ran ge O (1) ρ ≤ ε ≤ O (1) ρ and thus scales linearly with ρ . Therefore, in asymptotic results, the dep endence on ε and ρ can b e in terchange d. Sp ecifically , the ε dep end ence explored in Ap p endix A.2 can b e equally w ell expressed as a d ep enden ce on ρ . A.2 Pro of of Theorem 4.1: Upp er Bound on the Num b er of Leaps In this section w e prov e Theorem 4.1 fr om the text, w h ic h upp er-b ounds the num b er of leaps BTL tak es as a fu nction of m , t , and C : Theorem. F or any SCRN S with M sp e cies, any ε such that 0 < ε < 1 / (12 M ) , and any δ > 0 , ther e ar e c onstants c 1 , c 2 , c 3 > 0 such that for any b ounds on time t and total mole cular c ount m , for any volume V and any starting state, after c 1 log m + c 2 t ( C + c 3 ) le aps wher e C = m/V , either the b ound on time or the b ound on total mole cular c ount wil l b e exc e e de d with pr ob ability at le ast 1 − δ . W e pro ve a more detailed b ound than stated in the theorem ab o ve which explicitly shows the dep endence on ε hid den in the constant s . Also since we in tro duce the asymp totic results only the end of the argument, the intereste d reader may easily inv estigate the dep endence of the constan ts on other p arameters of the S CRN such as N , M , ν ij , and k j . W e also sho w an approac h to p robabilit y 1 that o ccurs exp onen tially fast as the b ound increases: if the b ound ab ov e ev aluates to n , then the probability that the algorithm do es not exceed m or t in n leaps is at most 2 e − O (1) n . Our argument s tarts with a co uple of lemmas. L o oking within a single leap, the firs t lemma b oun d s the d ecrease in the molecular coun t of a sp ecies due to a giv en reaction as a function of time. T he argum ent is essen tially that for a r eaction to decrease the molecular coun t of a sp ecies, th at sp ecies must b e a reactan t, and therefore the pr op ensity of the reaction is prop ortional to its molecular count. Thus we see a similarit y to an exp onen tial deca y pro cess and us e this to b ound the decrease. Note that a similar result do es not hold for the incr e ase in the molecular coun t of a sp ecies, since the molecular count of the increasing sp ecies need not b e in the prop ensit y f unction. ∗ Then the second lemma uses the u pp er b ound on how fast a sp ecies can d ecrease (the first lemma), together with the fact that in a leap some reaction must c hange s ome sp ecies by a r elativ ely large amount, to classify leaps in to those that either (1) tak e a long time or (2) increase some sp ecies significantly w ithout decreasing any other sp ecies by m u c h. Finally we s h o w that this implies th at if there are to o man y leaps we either violate the time b ound or the total molecular count b ound. ∗ If a reaction is con verting a popu lous sp ecies to a rare one, the rate of the increase of th e rare species can b e prop ortional to m times its molecular count. The rate of decrease, how ever, is alwa ys prop ortional to the molecular count of the decreasing sp ecies, or proportional to C times the molecular count of the decreasing sp ecies ( as w e’ll see below). 16 F or th e follo wing, v alues f and g will b e free parameters to b e d etermin ed late r . It helps to th ink of them as 0 < f ≪ g ≪ 1. Ho w long do es it tak e for a reaction to decrease x i b y g th fraction of the violation b ound εx i ? The n umb er of o ccurrences of R j to decrease x i b y g εx i or more is at least g εx i / | ν ij | . The follo win g lemma b oun ds the time requ ir ed for th ese man y o ccurr ences to happ en . Lemma A.1. T ake any f and g (0 < f , g < 1) , any r e action R j and sp e cies S i such that ν ij < 0 , any state ~ x , and any ε . Assuming that the pr op ensity of R j is fixe d at a j ( ~ x ) , with pr ob ability at le ast 1 − f /g , fewer than g εx i / | ν ij | o c curr enc es of R j happ en in time f ε/ ( | ν ij | k j ) if R j is unimole cular, or time f ε/ ( | ν ij | k j C ) if R j is bimole cular. Pr o of. F or reaction R j to decrease the amoun t of S i , it m u st b e that S i is a reactan t, an d th us x i is a factor in the prop en s it y fu nction. Sup p ose R j is u nimolecular. Then a j = k j x i and the exp ected num b er of o ccur rences of R j in time f ε | ν ij | k j is a j f ε | ν ij | k j ≤ f εx i | ν ij | . The desired result then follo ws fr om Marko v’s inequalit y . I f R j is bimolecular with S i 6 = S i ′ b eing the other reactan t then a j = k j x i x i ′ V ; alternativ ely , a j = k j x i ( x i − 1) V if R j is bimolecular with iden tical reactan ts. In general for bimolecular reactio n s a j ≤ k j x i C . S o the exp ected n u m b er of o ccurr ences of R j in time f ε | ν ij | k j C is a j f ε | ν ij | k j C ≤ f εx i | ν ij | . The desired result follo ws as b efore. Let time ˜ τ b e the min im um o ver all reactions R j and S i suc h th at ν ij < 0 of 1 / ( | ν ij | k j ) if R j is unimolecular, or 1 / ( | ν ij | k j C ) if R j is bimolecular. W e can think of ˜ τ setting the units of time for our argumen t. The abov e lemma implies that with p r obabilit y at lea s t 1 − f /g no reactio n decreases x i b y g εx i or more within time f ε ˜ τ . The follo wing lemma defines t yp ical leaps; they are of tw o types: long or S i -increasing. Recall M is the n u m b er of reaction channels and N is the num b er of sp ecies. Lemma A.2. (T ypic al le aps). F or any f and g (0 < f , g < 1) , and for any ε , with pr ob ability at le ast 1 − N M f /g one of the fol lowing is true of a le ap: 1. (long le ap) τ > f ε ˜ τ 2. ( S i -incr e asing le ap) τ ≤ f ε ˜ τ , and the le ap incr e ases some sp e cies S i at le ast as x i 7→ x i + ⌈ εx i ⌉ − g M εx i , while no sp e cie s S i ′ de c r e ases as much as x i ′ 7→ x i ′ − g M εx i ′ . Pr o of. By th e un ion b oun d o ve r the M reaction c hannels and th e N sp ecies, Lemma A.1 implies th at the pr obabilit y that some reaction decreases the amount of som e sp ecies S i b y g εx i or more in time f ε ˜ τ is at most N M f /g . No w sup p ose this un luc ky ev ent do es n ot happ en . Then if the leap time is τ ≤ f ε ˜ τ , no d ecrease is enough to cause a violation of the deviation b ound s, and thus it must b e that some r eactio n R j increases some sp ecies S i b y more than εx i . (Since R j m us t o ccur an integ er num b er of times, it actually m u st increase S i b y ⌈ εx i ⌉ or more.) Since no reaction decreases S i b y g εx i or more, we can b e sur e that S i increases at least by ⌈ εx i ⌉ − g M εx i . Lemma A.3. F or any sp e cies S i , a le ap de cr e ases S i at most as x i 7→ x i − M ⌊ εx i ⌋ − 2 . Pr o of. A t most M reactions ma y b e decreasing S i . A reaction can decrease S i b y as muc h as ⌊ εx i ⌋ without causing a violation of th e deviation b ound s. T he last r eactio n fir in g that causes the viola tion of the deviation b ounds ending the leap uses up at most 2 m olecules of S i (since reactions are at most bimolecular). 17 Note that a similar lemma do es not hold for Gillespie’s tau-leaping algorithms (Gillespie, 2001, 2003; C ao et al., 2006) b ecause th e num b er of reaction fi r ings in a leap can b e only b ound ed probabilistically . With some small pr ob ab ility a leap can result in “catastrophic” c hanges to some molecular coun ts. Since with en ou gh time suc h ev en ts are certain to o ccur, the asymptotic analysis must consider them. Consequent ly , asymp totic results analogous to those w e der ive in this section remain to b e pr o ve d for tau-leaping algorithms other th an BTL. Our goal no w is to use the ab ov e t wo lemmas to argue that if we h a ve a lot of leaps, w e w ould either violate the molecular coun t b ound (du e to man y S i -increasing leaps for the same S i ), or violate the time b ound (due to long leaps). Let n b e th e total n umb er of leaps. By Ho effding’s inequalit y , with probabilit y at least 1 − 2 e − 2 n ( N M f /g ) 2 (i.e., exp onen tially approac hing 1 with n ), th e total n u m b er of at ypical steps is b ound ed as: [# of at yp ical leaps] < 2 nN M f /g . (1) F urther, in order not to violate the time b ound t , the num b er of long steps can b e b ound ed as: [# of long leaps] ≤ t / ( f ε ˜ τ ) . (2) Ho w can we b oun d the num b er of the other leaps ( S i -increasing, for some sp ecies S i )? Our argum en t will b e th at having to o man y of suc h leaps results in an excessiv e increase of a certain sp ecies, thus violating the b ound on the total molecular coun t. W e start by c ho osing an S i for which there is the largest num b er of S i -increasing steps. Sin ce there are N sp ecies, th ere m u st b e a sp ecies S i for w hic h [# of S i -increasing leaps] > 1 N X S i ′ 6 = S i [# of S i ′ -increasing leaps] . (3) A t this p oint, it helps to develo p an alternativ e bit of notatio n lab eling the d ifferen t kinds of leaps w ith r esp ect to the ab o ve- chosen sp ecies S i to indicate ho w m u ch x i ma y c hange in the leap. S ince our goal will b e to argue that the molecular coun t of S i m us t b e large, w e would lik e to lo wer-b ou n d the increase in S i and up p er-b ound the decrease. An at ypical leap or a long leap w e lab el “ ↓↓ ”. By Lemma A.3 these leaps d ecrease S i at most as x i 7→ x i − M ⌊ εx i ⌋ − 2. An S i -increasing leap we lab el “ ↑ ”. Finally , an S i ′ -increasing leap for S i ′ 6 = S i w e lab el “ ↓ ”. By L emm a A.2, ↑ leaps incr ease S i at le ast as x i 7→ x i + ⌈ εx i ⌉ − g M εx i , while ↓ leaps decrease S i by less than x i 7→ x i − g M εx i . W e would lik e to express these op erations pu r ely in a multi plicativ e w a y so that they b ecome commutativ e, allo wing for b ound ing their total effect on x i indep end en t of the order in whic h these leaps o ccurred b ut solel y as a function of the n umb er of eac h t yp e. F urther, the m u ltiplicativ e representat ion of th e leap effects is imp ortan t b ecause we wan t to b ound the num b er of leaps logarithmically in the maxim um molecular coun t. Note that ↓↓ leaps cause a p roblem b ecause of the s u btractiv e constant term, and ↑ leaps cause a problem b ecause if x i drops to 0 multiplicat ive increases are futile. Nonetheless, for the sak e of argument supp ose w e k n ew that throughou t the simulat ion x i ≥ 3. T hen assum in g ε ≤ 1 / (12 M ), we can b ound the largest decrease d ue to a ↓↓ leap m ultiplicativ ely as x i 7→ (1 / 4) x i . F urther, w e lo wer-b ound th e increase du e to a ↑ leap as x i 7→ (1 + (1 − g M ) ε ) x i . 18 Then the lo wer b ound on the final molecular count of S i and therefore the total molecular coun t is 3(1 + (1 − g M ) ε ) n ↑ (1 − g M ε ) n ↓ (1 / 4) n ↓↓ ≤ m. (4) This imp lies an upp er b ound on the num b er of ↑ leaps, that tog ether with (eqns. 1)–(3) pro vid es an upp er b ound on the total num b er of leaps, as we ’ll see b elo w. Ho we ver, x i migh t dip b elo w 3 (including at the start of the sim u lation). W e can adju st the effectiv e num b er of ↑ leaps to comp ensate for these d ips. W e sa y a leap is in a dip if it starts at x i < 3. Observ e that the first leap in a dip starts at x i < 3 wh ile th e leap after a dip starts at x i ≥ 3. Thus, unless we en d in a dip, cutting out the leaps in the dips can only decrease our lo wer b ound on the fin al x i . W e’l l mak e an ev en lo oser b ound and mo dify (4 ) simply by r emoving the con trib ution of the ↑ leaps that are in dips. ∗ Ho w man y ↑ leaps can b e in dips? First let us ens ure g < 1 / (3 M ). Then sin ce a ↓ leap decreases x i b y less than g M εx i < x i / 3, and the decrease amount must b e an intege r, a ↓ lea p cannot br in g x i b elo w 3 starting at x i ≥ 3. Thus if w e start at x i ≥ 3 a ↓↓ leap m ust o ccur b efore we dip b elo w 3. Thus the largest num b er of dips is n ↓↓ + 1 (adding 1 since we may start th e sim ulation b elo w 3). Let n ↑ d and n ↓↓ d b e the n umb er of ↑ and ↓↓ leaps in the d th dip (w e don’t care ab out ↓ leaps in a dip since th ey m u st lea ve x i unc h anged). Then n ↑ d < 2 n ↓↓ d + 3 and P d n ↑ d < P d 2 n ↓↓ d + P d 3 ≤ 2 n ↓↓ + 3( n ↓↓ + 1) = 5 n ↓↓ + 3. Ther efore, the adj usted b ound (4 ) b ecomes: 3(1 + (1 − g M ) ε ) n ↑ − 5 n ↓↓ − 3 (1 − g M ε ) n ↓ (1 / 4) n ↓↓ ≤ m . F or simplicit y , w e u se the wea ker b ou n d 3(1 + (1 − g M ) ε ) n ↑ (1 − g M ε ) n ↓ (1 / 4) 6 n ↓↓ +3 ≤ m. (5) In order to argue that this b ounds the n um b er of ↑ leaps, we n eed to mak e sur e the ↓ leaps and the ↓↓ leaps d on’t cancel out the effect of the ↑ leaps. By inequalit y 3 w e kno w that n ↓ < N n ↑ . If w e can c ho ose g to b e a small enough constan t suc h that more than N ↓ leaps are r equ ired to cancel the effect of a ↑ leap we would b e certain the b ound increases exp onentia lly with n ↑ without caring ab out ↓ leaps. Sp ecifically , we choose a g small enough suc h that (1 + (1 − g M ) ε )(1 − g M ε ) N ≥ 1 + ε/ 2. F or example we can let g = 1 M (1 − (9 / 10) 1 / N ). † Note that g dep ends only on constan ts N an d M and is ind ep endent of ε . The b ound th en b ecomes 3(1 + ε/ 2) n ↑ (1 / 4) 6 n ↓↓ +3 . Th us fin ally we ha ve the follo w ing system of inequalities that are satisfied with p roba- bilit y exp onen tially approac hin g 1 as n → ∞ : n = n ↑ + n ↓ + n ↓↓ (6) n ↓↓ ≤ t/ ( f ε ˜ τ ) + 2 nN M f /g (7) n ↓ < N n ↑ (8) 3(1 + ε/ 2) n ↑ (1 / 4) 6 n ↓↓ +3 ≤ m. (9) ∗ W e k now we cannot end in a d ip if t h e resulting b ound eva luates to 3 or more. Th us technically we assume m ≥ 3 for th e b ou n d to b e alwa ys v alid. † Since g ≤ 1 / (3 M ), make the simplification (1 + (1 − g M ) ε ) ≥ (1 + 2 ε/ 3) and solve for g . The solution is minimized when ε = 1. 19 Solving for n w e obtain ∗ n ≤ h log( m/ 3) + (12 h + 1) t/ ( f ε ˜ τ ) + 6 h (1 − 24 hN M f /g ) if (1 − 24 hf /g ) > 0 where h = ( N + 1) / log (1 + ε/ 2) (also recall g = 1 M (1 − (9 / 10) 1 / N )). T o ensure this we let f ≤ g / (48 hN M ). Then with p robabilit y exp onent ially approac h in g 1 as n increases, n ≤ 2 log ( m/ 3) + 96(12 h + 1) th/ ( g ε ˜ τ ) + 12 h. Asymptotically as ε → 0 , m → ∞ , t → ∞ w ith the system of c h emical equations b eing fixed, w e ha ve g = O (1), h ≤ O (1) /ε , and write th e ab o ve as n ≤ O (1)(1 /ε ) log m + O (1)(1 /ε ) 3 t/ ˜ τ . Recall our unit of time ˜ τ wa s defined to b e the minimum o ver all reactions R j and sp ecies S i suc h th at ν ij < 0 of 1 / ( | ν ij | k j ) if R j is unimolecular, or 1 / ( | ν ij | k j C ) if R j is b im olecular. No matter what C is, we can sa y ˜ τ ≥ 1 / ( O (1) C + O (1)). Th u s we can write the ab o ve as n ≤ O (1)(1 /ε ) log m + O (1)(1 /ε ) 3 t ( C + O (1)) . F or an y δ , w e can find appr opriate constants suc h that the ab o ve b ound is satisfied with probabilit y at least 1 − δ . This b ound on the num b er of leaps has b een optimized for simplicit y of pro of rather than tight n ess. A more sophisticated analysis can lik ely signifi can tly d ecrease the numerica l constan ts. F urther, we b eliev e the cubic dep endence on 1 /ε in the time term is excessive. † A.3 Provin g Robustness b y Monotonicit y In this section we dev elop a tec h nique th at can b e used to pro ve the robustn ess of certain SSA pro cesses. W e use these results to p r o ve the robustn ess of the example in S ection 3 as we ll as of the constr u ction of Angluin et al. (2006) simulat in g a T uring mac hin e in App endix A.4. Since ρ -p erturb ations are not Marko vian, it is difficult to think ab out them. Can we use a prop erty of the original SSA pro cess that w ould allo w u s to pro v e robustness without referring to ρ -p ertur b ations at all? Some systems h a v e the p rop erty that eve ry reaction can only b ring the system “closer” to the outcome of in terest (or at least “no fu ther”). F ormally , w e sa y an SS A pro cess is monotonic f or outcome Γ if for all reac hable states ~ x, ~ y suc h that there is a reaction taking ~ x to ~ y , and f or all t , the p robabilit y of reac h ing Γ within time t starting at ~ y is at least the probabilit y of r eac hing Γ within time t starting at ~ x . Note that by this definition Γ m ust b e absorbing. Intuitiv ely , p ertur bation of prop en sities in monotonic systems only c hange ho w fast the system approac hes the ou tcome. Indeed, we can b ound the deviations in the outcome pr obabilit y of an y ρ -p ertu r bation at an y time by tw o sp ecific ρ -p erturbations, ∗ Logarithms are base-2. † The cubic dep endence on 1 /ε in t he time term is due to h a v ing to decrease th e probability of an at ypical step as ε decreases. It ma y b e p ossible to redu ce the cu bic d ep endence to a linear one by moving up the bou n dary betw een a dip and the multiplica t ive regime as a function of ε rather t h an fixing it at 3. The goal is to replace the constant base (1 / 4) O (1) n ↓↓ + O (1) term with a (1 − O (1) ε ) O (1) n ↓↓ + O (1) term. Then the effect of a ↓↓ leap wo u ld scale with ε , as does the effect of an ↑ leap. 20 whic h are the maximally slo wed down and sp ed up v ersions of the original p ro cess. This implies that monotonic S SA p r o cesses are r ob u st at all times t wh en the outcome probabilit y do es not c hange qu ic kly with t , and thus slo w ing d o wn or sp eeding up the SS A p ro cess do es not significan tly affect the probability of the outcome. F or an SSA pr o cess or ρ -p erturbation C and set of states Γ, define F Γ ( C , t ) to b e the probabilit y of b eing in Γ at time t . F or SS A pr o cess C , let ˜ C − ρ b e th e ρ -p ertur bation defin ed b y the constant deviations ξ j ( t ) = 1 − ρ . Similarly , let ˜ C + ρ b e the ρ -p erturb ation d efined b y the constant deviations ξ j ( t ) = 1 + ρ . Lemma A.4. If an SSA pr o c ess C i s monotonic for outc ome Γ , then for any ρ -p erturb ation ˜ C of C , F Γ ( ˜ C − ρ , t ) ≤ F Γ ( ˜ C , t ) ≤ F Γ ( ˜ C + ρ , t ) . Pr o of. If an SSA p r o cess is monotonic, allo w ing extra “sp on taneous” transitions (as long as they are legal according to the SSA pro cess) cannot indu ce a dela y in en tering Γ. W e can d ecomp ose a p ertur b ation w ith ξ j ( t ) ≥ 1 as the SS A pro cess combined with some extra probabilit y of reaction o ccurrence in the next in terv al dt . Thus, for a p erturbation ˜ C of a monotonic SSA pro cess C in which ξ j ( t ) ≥ 1, we hav e F Γ ( C , t ) ≤ F Γ ( ˜ C , t ). By a similar argumen t, if ˜ C h as ξ j ( t ) ≤ 1, then F Γ ( ˜ C , t ) ≤ F Γ ( C , t ). No w ˜ C − ρ and ˜ C + ρ are themselv es monotonic SSA pro cesses ( C scaled in time). Th en by the ab o ve b ound s , for an y ρ -p erturb ation ˜ C of C we hav e F Γ ( ˜ C − ρ , t ) ≤ F Γ ( ˜ C , t ) ≤ F Γ ( ˜ C + ρ , t ). Since ˜ C − ρ and ˜ C + ρ are simply th e original SSA pro cess C scaled in time b y a factor of 1 / (1 + ρ ) and 1 / (1 − ρ ), resp ectiv ely , w e can write the b ound of th e ab ov e lemma as F Γ ( C , t/ (1 + ρ )) ≤ F Γ ( ˜ C , t ) ≤ F Γ ( C , t/ (1 − ρ )). Rephrasing Lemma A.4: Corollary A.1. If an SSA pr o c ess C is monotonic for outc ome Γ then it is ( ρ, δ ) -r obust with r e sp e ct to Γ at time t wher e δ = F Γ ( ˜ C + ρ , t ) − F Γ ( ˜ C − ρ , t ) = F Γ ( C , t/ (1 − ρ )) − F Γ ( C , t/ (1 + ρ )) . F or m any SSA p ro cesses, it may not b e obvious wh ether they are monotonic. W e w ould lik e a simple “syntac tic” prop ert y of th e SC R N that guarantee s m onotonicit y and can b e easily chec k ed. The follo win g lemma mak es it easy to p ro ve monotonicit y in some simple cases. Lemma A.5. L et C b e an SSA pr o c ess and Γ an outc ome of SCRN S . If eve ry sp e cies is a r e actant i n at most one r e action in S , and ther e is a se t { n j } such that outc ome Γ o c curs as so on as ev ery r e action R j has fir e d at le ast n j times, then C is monotonic with r esp e ct to Γ . Pr o of. The restriction on Γ allo ws us phr ase ev erything in terms of counting reaction o c- currences. F or every reaction R j , defi n e F j ( n, t ) to b e the probabilit y that R j has fired at least n times w ithin time t . No w s u pp ose w e indu ce some reaction to fire b y fiat. T h e only w ay this can decrease some F j ( n, t ) is if it decreases the count of a r eactan t of R j or mak es it m ore like ly that some reaction R j ′ ( j ′ 6 = j ) will d ecrease the count of a reactan t of R j . Either p ossibilit y is a vo id ed if the SCRN h as the p rop erty that an y sp ecies is a reactan t in at m ost one reaction. Since F Γ ( C , t ) = Q j F j ( n j , t ), this quantit y cannot d ecrease as well, and monotonicit y f ollo w s. 21 A.4 Robust Em b edding of a TM in an SCRN Since we are tryin g to b ound how the complexit y of the p r ediction problem s cales with increasing b ound s on t and C but not with different SCRNs, we need a metho d of embedd ing a TM in an SCRN in w hic h the SCRN is indep endent of th e inp ut length. Among suc h metho ds av ailable (Angluin et al., 2006; S olo v eic hik et al., 2008), asymptotically the most efficien t and th erefore b est for our pur p oses is the construction of Angluin et al. This result is stated in the language of distributed m ulti-agen t systems rather than molecular systems; the system is a well-mixe d set of “agen ts” that rand omly colli d e and exc hange information. Eac h agen t has a finite state . Agen ts corresp ond to molecules (the sys tem preserve s a constant molecular count m ); states of agen ts corresp ond to the sp ecies, and in teractions b et wee n agen ts corresp ond to reactions in whic h b oth molecules are p oten tially transformed. No w for th e details of the S CRN im p lemen tation of An gluin ’s proto col. Supp ose w e construct an SCRN corresp onding to th e Angluin et al system as f ollo ws: Agen t states corresp ond to sp ecies (i.e., for ev ery agen t state i there is a u n ique sp ecies S i ). F or ev ery pair of sp ecies S i 1 , S i 2 , ( i 1 ≤ i 2 ) we add reaction S i 1 + S i 2 → S i 3 + S i 4 if the p opulation proto col transition function sp ecifies ( i 1 , i 2 ) 7→ ( i 3 , i 4 ). Note that w e allo w n ull react ions of the form S i 1 + S i 2 → S i 1 + S i 2 including for i 1 = i 2 . F or ev ery r eactio n R j , we ’ll use r ate constan t k j = 1. The sum of all r eaction p rop ensities is λ = m ( m − 1) 2 V since ev ery molecule can react with an y other molecule. ∗ The time u n til next reaction is an exp onent ial random v ariable with rate λ . Note th at the transition probabilities b et wee n S CRN states are the same as the transition probabilities b etw een the corresp onding configur ations in the p opulation proto col s ince in the SCRN every tw o molecules are equally lik ely to react next. Th us the SSA pr o cess is just a cont in u ous time v ersion of the p opu lation proto col p ro cess (where u nit “time” expires b et ween trans itions). Therefore th e SCRN can simulate a T M in th e same wa y as the p opulation p roto col. But firs t we need to see ho w do es time measur ed in the n umb er of interac tions corresp ond to th e real-v alued time in the language of SCRNs? Lemma A.6. If the time b etwe en p opulation pr oto c ol inter actions is an exp onential r andom variable with r ate λ , then for any p ositive c onstants c, c 1 , c 2 such that c 1 < 1 < c 2 , ther e is N 0 such that for al l N > N 0 , N inter actions o c cur b etwe en time c 1 N/λ and c 2 N/λ with pr ob ability at le ast 1 − N − c . Pr o of. The Ch er n off b ound for the left tail of a gamma r andom v ariable T w ith shap e parameter N and rate λ is Pr[ T ≤ t ] ≤ ( λt N ) N e N − λt for t < N /λ . T h u s Pr [ T ≤ c 1 N/λ ] ≤ ( c 1 e 1 − c 1 ) N . Sin ce c 1 e 1 − c 1 < 1 when c 1 6 = 1, Pr[ T ≤ c 1 N/λ ] < N − c for large enough N . An identic al argum en t applies to the right tail Chernoff b ound Pr[ T ≥ t ] ≤ ( λt N ) N e N − λt for t > N /λ . The follo wing lemma reiterates that an arbitrary computational problem can b e em- b edded in a c hemical s y s tem, and also shows that the c hemical computation is r obust with ∗ Just to confirm, splitting the reactions b etw een the same sp ecies and b etw een different sp ecies, the sum of the prop ensities is P i x i ( x i − 1) 2 V + P i 0 , δ > 0 , and a r andom i ze d TM M with a Bo ole an output. Ther e is an SCRN implementing Angluin et al’s p opulation pr oto- c ol, such that if M ( x ) halts in no mor e than t tm steps using no mor e than s tm time, then starting with the enc o ding of x and using m = O (1)2 s tm mole cules, at any time t ≥ t ssa = O (1) V t tm log 4 ( m ) /m the SSA pr o c ess is in ~ x f b with pr ob ability that is within δ of the pr ob ability that M ( x ) = b . F urther, this SSA pr o c ess is ( ρ, δ ) -r obust with r esp e ct to states ~ x f 0 and ~ x f 1 at al l times t ≥ t ssa . The fir st part of th e lemma states that w e can em b ed an arbitrary TM computation in an SCRN, such that the TM computation is p erformed fast and correctly with arbitrarily high probab ility . The s econd part states that th is metho d can b e m ade arbitrarily r obust to p erturb ations of reaction pr op ensities. Th e fi rst part follo ws directly from th e resu lts of Angluin et al. (2006), while the second p art requ ires some add itional arguments on our part. If we only wa nted to pro ve the fi r st part, fix an y randomized TM M w ith a Bo olean output and an y constant δ > 0. Th ere is a p opulation pr otocol of Angluin et al that can sim ulate the TM’s compu tation on arbitrary inp uts as follo w s: If on some input x , M us es t tm computational time and s tm space, then the pr otocol u s es m = O (1)2 s tm agen ts, and the pr obabilit y that the simulati on is incorrect or takes longer th an N = O (1) t tm m log 4 m in teractions is at most δ / 2. This is pro ved b y using Theorem 11 of Angluin et al. (2006), com bined with the standard wa y of simulat in g a TM by a register mac hine using m u ltipli- cation b y a constant and division b y a constan t with remainder. The total probabilit y of the computation b eing incorrect or lasting more than N interac tions obtained is at most O (1) t tm m − c . Since for an y algorithm terminating in t tm steps, 2 s tm ≥ O (1) t tm , w e can m ak e sure this pr obabilit y is at most δ / 2 by using a large enough constan t in m = O (1)2 s tm . By Lemma A.6, the pr obabilit y that O (1) N interacti ons tak e longer than O (1) N /λ time to o ccur is at most δ/ 2. T hus the total probability of incorr ectly simulating M on x or taking longer than O (1) N/λ = O (1) V t tm log 4 ( m ) /m time is at most δ . The Bo olean outp ut of M is indicated by wh ether w e en d up in state ~ x f 0 or ~ x f 0 . (If th e computation w as incorrect or to ok to o long w e can b e in neither.) This pro v es the first p art of th e lemma. W e no w sketc h out the pr o of of ho w the r obustness of the Angluin et al system can b e established, completing the pro of of Lemma A.7. T he whole pro of requires retracing the argumen t in the original pap er; here, we ju st outline h o w this retracing can b e done. First, w e con ve r t the ke y lemmas of their pap er to use real-v alued SCR N time rather than the n umb er of inte r actions. The consequences of the lemmas (e.g., that something happ en s b efore something else) are p reserv ed and th u s the lemmas can b e still b e u sed as in the original pap er to pr o ve the corresp ond in g result f or SCRNs. The monotonicit y of th e pro cesses analyzed in the ke y lemmas can b e used to argue that the o ve r all construction is robust. W e need the follo w ing consequence of Lemma A.4: Corollary A.2. If an SSA pr o c ess C is monotonic for outc ome Γ , and with pr ob ability p it enters Γ after time t 1 but b efor e time t 2 , then for any ρ -p erturb ation ˜ C of C , the pr ob ability of entering Γ after time t 1 / (1 + ρ ) but b efor e time t 2 / (1 − ρ ) is at le ast p . 23 Pr o of. Let p 1 = F Γ ( C , t 1 ) and p 2 = F Γ ( C , t 2 ). Using Lemma A.4 we kno w that ∀ t , F Γ ( C , t/ (1 − ρ )) ≥ F Γ ( ˜ C , t ). Thus, p 1 = F Γ ( C , t 1 ) ≥ F Γ ( ˜ C , (1 − ρ ) t 1 ). Similarly we obtain p 2 = F Γ ( C , t 2 ) ≤ F Γ ( ˜ C , (1 + ρ ) t 2 ). Th u s F Γ ( ˜ C , (1 + ρ ) t 2 ) − F Γ ( ˜ C , (1 − ρ ) t 1 ) ≥ p 2 − p 1 = p . As an example let u s illustrate the conv ersion of Lemma 2 of An gluin et al. (2006). The Lemma b ou n ds the n u m b er of interac tions to infect k agen ts in a “one-w a y epid emic” starting with a single infected agen t. In the one-wa y ep id emic, a non-infected agen t b ecomes infected wh en it inte racts with a pr eviously inf ected agen t. With our notation, this lemma states: Let N ( k ) b e the n u m b er of in teractions b efore a one-wa y epidemic starting with a single infected agen t infects k agen ts. Then for any fixed ε > 0 and c > 0, there exist p ositiv e constan ts c 1 and c 2 suc h that for s u fficien tly large total agen t coun t m and any k > m ε , c 1 m ln k ≤ N ( k ) ≤ c 2 m ln k with probability at least 1 − m − c . F or any m and k w e consider the corresp ond ing SSA pro cess C and outcome Γ in which at least k agen ts are infected. Since the b ounds on N ( k ) scale at least linearly with m , we can use L emma A.6 to ob tain: Let t ( k ) b e the time b efore a one-w a y epidemic starting with a single infected agen t infects k agen ts. Then f or an y fi x ed ε > 0 and c > 0, there exist p ositiv e constan ts c 1 and c 2 suc h that f or sufficientl y large total agen t coun t m and any k > m ε , c 1 m ln( k ) /λ ≤ t ( k ) ≤ c 2 m ln( k ) /λ with p robabilit y at least 1 − m − c . Finally consider the SSA pro cess of the one-w a y ep id emic spreading. Th e p ossible reactions either do nothing (r eactan ts are either b oth in f ected or b oth non-inf ected), or a new agen t b ecomes infected. It is clear that for any m and k , C is monotonic with resp ect to outcome Γ in w hic h at least k agen ts are infected. This allo ws us to use Corollary A.2 to obtain: Fix an y ρ > 0, and let t ( k ) b e the time b efore a one-w a y epidemic starting with a single infected agen t infects k agent s in some corresp ond ing ρ -p erturb ation. Then for an y fi xed ε > 0, c > 0, there exist p ositiv e constants c 1 and c 2 suc h that for suffi cien tly large total agen t count m and any k > m ε , c 1 m ln( k ) / ( λ (1 + ρ )) ≤ t ( k ) ≤ c 2 m ln( k ) / ( λ (1 − ρ )) with p robabilit y at least 1 − m − c . Since ρ is a constan t, w hat we hav e effectiv ely d one is conv ert the result in terms of inter- actions to a result in terms of r eal-v alued time that is robust to ρ -p ertu rbations simply b y dividing b y λ and u s ing d ifferent multiplicat ive constant s . The same pr o cess can b e follo w ed for the k ey lemmas of Angluin et al (Lemma 3 th r ough Lemma 8). This allo ws u s to p r o ve a robu st version of T heorem 11 of Angluin et al by retracing the argument of their pap er using th e con verted lemmas and the real-v alued n otion of time throughout. Sin ce the only wa y that time is used is to argue that something o ccurs b efore something else, the new notion of time, obtained by dividing by λ with different constan ts, can alwa ys b e us ed in p lace of th e num b er of interac tions. 24 A.5 Pro of of Theorem 5.1: Lo w er Bound on the Computational Com- plexit y of t he Prediction Pr oblem In this section we pro ve Theorem 5.1 from the text which lo wer-boun ds the computational complexit y of the pr ed iction problem as a fu nction of m , t , and C . The b oun d h olds ev en for arbitrarily r obust SS A pro cesses. Th e theorem sho ws that this computational complexity is at least linear in t and C , as long as the dep end ence on m is at most p olylogarithmic. The result is a consequ en ce of the robust em b edding of a TM in an SCRN (Lemma A.7). Let the prediction problem b e sp ecified by giving the SSA p ro cess (via the initial state and v olume), the target time t , and th e target outcome Γ in some standard enco d ing suc h that whether a state b elongs to Γ can b e computed in time p olylogarithmic in m . Theorem. Fix any p erturb ation b ound ρ > 0 and δ > 0 . Assuming the hier ar chy c onje ctur e (Conje c tu r e 5.1), ther e is an SCRN S such that for any pr e diction algorithm A and c onstants c 1 , c 2 , β , η , γ > 0 , ther e is an SSA pr o c ess C of S and a ( m, t, C , 1 / 3) -pr e diction pr oblem P of C such that A c annot solve P i n c omputationa l time c 1 (log m ) β t η ( C + c 2 ) γ if η < 1 or γ < 1 . F urther, C is ( ρ, δ ) -r obust with r esp e c t to P . Supp ose someone claims that for an y fixed SCRN, they can pro d uce an algorithm for solving ( m, t, C, 1 / 3)- p rediction p roblems for SS A pro cesses of this SCRN assuming the SSA pro cess is ( ρ, δ )-robu st with r esp ect to the p rediction p r oblem for some fi xed ρ and δ , and further they claim the algorithm run s in computation time at most O (1) (log ( m )) β t η ( C + O (1)) γ (10) for some η < 1 ( β , γ > 0). W e argue that assuming the hierarch y conjecture is true, such a v alue of η is imp ossible. T o ac hieve a con tradiction of th e h ierarch y conjecture, consider an y function probabilis- tically compu table in t tm ( n ) = O (1) n ζ time and s tm ( n ) = O (1) n space f or ζ = β +4 η 1 − η + 1. Construct a randomized TM ha ving error at most 1 / 24 b y running the original rand om- ized T M O (1) times and taking the ma jority v ote. Use Lemma A.7 to enco de the TM probabilistically compu ting this function in a ( ρ, δ )-robust SSA p ro cess su c h that the er- ror of the TM simulat ion is at most 1 / 24. Then predicting wh ether the pro cess ends up in state ~ x f 0 or ~ x f 1 pro vid es a probabilistic algorithm for compu ting this function. The resulting er r or is at most 1 / 24 + 1 / 24 + 1 / 3 = 5 / 12 < 1 / 2, where the firs t term 1 / 24 is the err or of the TM, the second term 1 / 24 is for th e additional error of the TM embed - ding in the SS A pro cess, and the last term 1 / 3 is f or th e allo w ed error of the prediction problem. By rep eating O (1) times and taking the ma jority vo te, this error can b e redu ced b elo w 1 / 3, thereb y satisfying the definition of pr obabilistic compu tation. Ho w long d o es this metho d tak e to ev aluate the f u nction? W e use V = m so th at C is a constant, result- ing in t ssa = O (1) t tm ( n ) log 4 m = O (1) n ζ +4 since m = O (1)2 n . Setting up the pr ediction problem by sp ecifying the SSA pr o cess (via the initial s tate and v olume), target fin al s tate and time t ssa requires O (1) log m = O (1) n time. ∗ Then the prediction pr oblem is solv ed in ∗ By th e construction of A ngluin et al. (2006), setting up the initial state requires letting t h e binary expansion of the molecular coun t of a certain sp ecies b e equal the inp ut. S ince the inpu t is given in binary and all molecular counts are represented in b inary , this is a linear time op eration. Setting up the fi n al state ~ x f 0 or ~ x f 1 is also linear t ime. Comput ing th e target time for the p rediction problem t ssa is asymptotically negligible. 25 computation time O (1)(log ( m )) β t η ssa = O (1) n β +( ζ +4) η . Th u s the total compu tation time is O (1)( n β +( ζ +4) η + n ) w hic h, by our c h oice of ζ , is less than O (1) n ζ , leading to a con tr ad iction of the h ierarc hy conjecture. Is γ < 1 p ossible? Observe that if γ < η then the claimed running time of the algorithm solving the prediction problem (expression 10) w ith time t ssa = O (1) V t tm ( n ) log 4 ( m ) /m can b e made arbitrarily small b y decreasing V . This leads to cont r adiction of the hierarch y conjecture. T h erefore γ ≥ η ≥ 1. A.6 On Implemen ting BTL on a Random ized TM The idealized BTL algorithm pr esen ted in Section 4.1 relies on infinite precision real-v alue arithmetic, w hile only fin ite precision floating-p oin t arithmetic is p ossible on a TM. F urther, the basic randomness generating op eration a v ailable to a r andomized TM is c h o osing one of a fixed num b er of alternativ es uniform ly , which forces gamma and binomial dr aws to b e appro ximated. Th is complicates estimates of the compu tation time requ ired p er leap, and also requires us to ensu re th at w e can ignore round -off errors in floating-p oin t op erations and tolerate ap p ro ximate sampling in r andom n um b er d ra ws . Can w e implement gamma and bin omial rand om num b er generators on a rand omized TM and ho w m uch computational time do they require? It is easy to see th at arbitrary precision u niform [0 , 1] random v ariates can b e d ra wn on a randomized TM in time linear in pr ecision. It is likely that appr o ximate gamma and binomial random v ariables can b e dra w n us in g metho d s a v ailable in the numerical algorithms literature w h ic h us es u n iform v ariate draws as the essenti al primitiv e. Since m an y existing metho ds for efficien tly dra w- ing (app r o ximate) gamma and binomial random v ariables in v olve th e rejection metho d, the computation time for th ese op erations is lik ely to b e an exp ectatio n . S p ecifically , it seems reasonable that d ra win g gamma and binomial random v ariables can b e approximat ely imple- men ted on a rand omized TM suc h that the exp ected time of these op erations is p olynomial in the length of the fl oating-p oint representati on of the distrib ution parameters and the resultan t r andom quant ity . ∗ The compu tational complexit y of manipulating inte ger molecular coun ts on a TM is p olylogarithmic in m . Let l b e an u pp er b ound on the exp ected computational time required for d ra win g the random v ariables and real num b er arithmetic; l is p oten tially a fu nction of m , V , t , and th e bits of precision used. Using Mark o v’s inequalit y and Theorem 4.1 we can then obtain a b ound on the total computation time that is true with arbitrarily high probabilit y . W e mak e the TM keep trac k of the total num b er of computational steps it h as tak en † and cut off computation when it exceeds the exp ectation by some fi xed factor. Th en w e obtain the follo wing b oun d on the total computation time: O (1)((log ( m )) O (1) + l ) t ( C + O (1)). ∗ The n u merical algorithms literature, which assumes that basic floating p oint op erations take unit time, describes a number of algorithms for d ra wing from an (approximate) standard gamma distribu- tion (A hrens & Dieter, 1978 ), and from a binomial distribution (Kac hitv ic hyan uku l & Schmeiser, 1988), such that the exp ected num b er of floating-point op erations does n ot grow as a function of distribution parameters (how ever, some restrictions on the parameters ma y b e requ ired). On a TM basic arithmetic operations take p olynomial time in the length of the starting numerica l v alues and the calculated result. † Compute the b ound and write this many 1’s on a work tap e, and after each computational step, count off one of th e 1’s until no more are left. 26 W e hav e three s ources of error. First, since BTL simulat es a ρ -p ertu rbation rather than the original SSA pro cess, the probabilit y of the outcome ma y b e off by δ 1 , assuming the SSA pr o cess was ( ρ, δ 1 )-robust. F urther, since w e are usin g finite p recision arithmetic and only appro ximate random n umb er generati on, the deviation from th e correct p robabilit y of the outcome ma y increase by another δ 2 . Final ly , th ere is a δ 3 probabilit y that th e algorithm cuts off compu tation b efore it completes. W e wa n t to guarante e that the total error δ 1 + δ 2 + δ 3 ≤ δ , fu lfilling th e requirements of solving the ( m, t, C , δ )-pred iction pr ob lem. While δ 1 < δ as a p recondition, and we can mak e δ 3 arbitrarily s m all, a rigorous b oun d on δ 2 is b eyond the scop e of this pap er. ∗ Ac kno w ledgmen ts: I thank Er ik Winfree and Matthew Cook for pro viding inv aluable supp ort, tec hnical insigh t, corrections and suggestions. This work wa s su pp orted by NSF Gran t No. 0523761 to Winfree and NIMH T raining Grant MH19138-1 5 to CNS. References Adalsteinsson, D., McMillen, D., & Elston, T. C. (2004). Bioc h emical net work sto chastic sim ulator (BioNetS): s oftw are for sto chastic mo d eling of bio c h emical n et wo rks. BMC Bioinformatics , 5 , 24–45 . Ahrens, J., & Dieter, U. (1978). Generating Gamma V ariates by a Mod ified Rejection T ec hnique. L anguage , 54 , 853–882. Alon, U. (2007). An Intr o duction to Systems B i olo gy: Design Principles of Biolo gi c al Cir- cuits . Chapman & Hall/CR C. Angluin, D., Aspnes, J ., & Eisenstat, D. (2006). F ast computation b y p opulation p r oto- cols w ith a lea d er. T ec h. Rep. Y ALE U/DCS/TR-1358 , Y ale Univ ersity Department of Computer S cience. E xtended abstract to app ear, DISC 2006. Arkin, A. P ., Ross, J., & McAdams, H. H. (1998). S to c hastic kinetic analysis of a deve lop- men tal pathw a y bifur cation in phage-l Escheric hia coli. Genetics , 149 , 1633– 1648. Barak, B. (2002). A probabilistic-time h ierarch y theorem for ‘sligh tly non-uniform’ algo- rithms. In Pr o c e e dings of RANDOM , 194–208. Cao, Y., Gillespie, D., & P etzold, L. (2006). Efficien t step s ize selectio n for th e tau-leaping sim ulation metho d. The J ournal of Chemic al Physics , 124 , 044109. Elo witz, M. B., Levine, A. J., Siggia, E. D., & Sw ain, P . S. (2002). S to c hastic gene expression in a single cell. Scienc e , 297 , 1183– 1185. ∗ W e conjecture that for any fix ed δ 2 , we can find some fixed amount of numerical precision to not exceed δ 2 for ( ρ , δ 1 )-robust p ro cesses. W e would like to show th at robustn ess according to our defin ition implies robustness to round-off errors and approximate random n u mb er generation. Wh ile this conjecture has strong intuitiv e app eal, it seems d ifficu lt to prove formally , and rep resen t s an area for furth er study . 27 ´ Erdi, P ., & T´ oth, J. (1989). Mathematic al M o dels of Chemic al R e actions : The ory and Applic ations of D eterministic and Sto chastic Mo dels . Manc hester Univ ersity Press. Ethier, S. N., & Ku r tz, T. G. (1986). Markov P r o c esses: Char acterization and Conver genc e . John Wiley & Sons. F ortno w, L., & Sant h anam, R. (2006). Rec ent w ork on hierarchies for seman tic classes. SIGACT N ews , 37 , 36–54. Gibson, M., & Bruc k, J. (2000). Efficient exact s to c hastic sim u lation of c hemical s ystems with many sp ecies and many c hann els. Journal of Physic al Chemistry A , 104 , 1876–18 89. Gillespie, D. T. (1977). Exact sto c h astic simulation of coup led c h emical reactions. Journal of Physic al Chemistry , 81 , 2340– 2361. Gillespie, D. T. (1992). A rigorous d eriv atio n of the c h emical master equ ation. Physic a A , 188 , 404–42 5. Gillespie, D. T. (2001). Approxima te accelerat ed sto chastic sim u lation of chemica lly react- ing systems. Journal of Chemic al Physics , 115 , 1716–17 33. Gillespie, D. T. (2003). Impr o ve d leap-size selection for accelerated sto chastic simulatio n . The Journal of Chemic al Physics , 119 (16), 8229–823 4. Gillespie, D. T. (2007). Sto chasti c simulatio n of chemical kinetics. Annual R eview of Physic al Chemistry , 58 , 35–55. Guptasarma, P . (1995 ). Do es replication-induced transcription regulate synthesis of the m yriad low cop y num b er pr oteins of Esc h eric hia coli? Bio essays , 17 , 987?–99 7. Horn, F., & Jackson, R. (1972). General mass action kinetics. Ar chive for R ational Me- chanics and Ana lysis , 47 (2), 81–116. Kac hitvic hy an u kul, V., & Sc h meiser, B. (19 88). Binomial random v ariate generation. Com- munic ations of the ACM , 31 (2), 216–222. Kierzek, A. M. (2002). STOCKS: S TOChastic kinetic sim u lations of b io c hemical systems with Gillespie algorithm. B i oinformatics , 18 , 470–48 1. Kurtz, T. G. (1972 ). The relationship b et wee n sto c hastic and deterministic mo dels for c hemical r eactio ns. The Journal of Chemic al Physics , 57 , 2976–29 78. Levin, B. (1999). Genes VII . Oxford Unive r sit y Press. Malek-Ma n sour, M., & Nicolis, G. (1975). A master equation description of lo cal flu ctua- tions. J ournal of Statistic al P hysics , 13 , 197–217. McAdams, H. H., & Arkin, A. P . (1997). Sto c h astic mec han ism s in gene expression. Pr o- c e e dings of the N ational A c ademy of Scie nc es , 94 , 814–819. McQuarrie, D. A. (1967) . Sto c hastic approac h to c h emical kinetics. Journal of Applie d Pr ob ability , 4 , 413–478. 28 Morohashi, M., Winn, A. E., Borisuk, M. T., Bolouri, H., Doyl e, J., & Kitano, H. (2002). Robustness as a Measure of Plausib ilit y in Mo d els of Bio chemica l Net wo rks. Journal of The or etic al Bi olo gy , 216 (1), 19–30. Rathinam, M., & El S amad, H. (2007). Rev ersible-equiv alen t-monomolecular tau: A leaping metho d for “small num b er and stiff” sto c hastic c hemical systems. Journal of Computa- tional Physics , 224 (2), 897–92 3. Rathinam, M., Petz old, L., Cao, Y., & Gillespie, D. (2003). Stiffness in sto chastic chemicall y reacting sys tems: The im p licit tau-leaping method . The Journal of Chemic al Physics , 119 , 12784. Sipser, M. (1997). Intr o duction to the The ory of Computation . PWS Pu blishing, Boston. Solo v eichik, D., C o ok, M., Winfree, E ., & Br u c k, J. (2008). Computation with fin ite sto chas- tic chemical reaction n et wo r ks. Natur al Computing , 7 , 615–63 3. Son tag, E. (2007). Monotone and Near-Monotone Systems. L e ctur e Notes in Contr ol and Information Scienc es , 357 , 79–122. Suel, G. M., Garcia-Ojalv o, J., Lib erman, L. M., & Elo witz, M. B. (2006). An excitable gene r egulatory circuit in duces transien t cellular differentia tion. Natur e , 440 , 545–550 . van K amp en, N. (1997). Sto chastic Pr o c esses in Physics and Chemistry . Elsevier, revised edition ed. V asudev a, K., & Bhalla, U. S. (2004). Adaptiv e stochastic- d eterministic c hemical kin etic sim ulations. Bioinformatics , 20 , 78–84. 29
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment