Emotions, diffusive emotional control and the motivational problem for autonomous cognitive systems
All self-active living beings need to solve the motivational problem: The question what to do at any moment of their live. For humans and non-human animals at least two distinct layers of motivational drives are known, the primary needs for survival and the emotional drives leading to a wide range of sophisticated strategies, such as explorative learning and socializing. Part of the emotional layer of drives has universal facets, being beneficial in an extended range of environmental settings. Emotions are triggered in the brain by the release of neuromodulators, which are, at the same time, the agents for meta-learning. This intrinsic relation between emotions, meta-learning and universal action strategies suggests a central importance for emotional control for the design of artificial intelligences and synthetic cognitive systems. An implementation of this concept is proposed in terms of a dense and homogeneous associative network (dHan).
💡 Research Summary
The paper tackles the fundamental “motivational problem” that any self‑active organism must solve: deciding what to do at every moment. It argues that living agents operate with two hierarchical layers of drives. The first layer consists of primary survival needs such as energy, nutrition, and safety. The second layer comprises emotional drives that generate sophisticated strategies like exploration, learning, and social interaction. Emotions are triggered in the brain by the rapid release of neuromodulators (e.g., dopamine, norepinephrine, serotonin). These chemicals not only produce the subjective feeling of emotion but also serve as agents of meta‑learning: they modulate synaptic plasticity, adjust learning rates, and re‑configure network dynamics. Consequently, emotions function as internal control signals that can adapt learning parameters independently of external rewards.
The authors critique conventional reinforcement learning (RL) and meta‑reinforcement learning (MRL). Standard RL relies on externally supplied reward signals, which become sparse or ambiguous in complex, changing environments. MRL attempts to learn the learning algorithm itself but still depends on designer‑specified meta‑rewards. By contrast, an emotion‑based meta‑learning system can generate intrinsic rewards: feelings of anxiety increase exploration and learning rates, while satisfaction stabilizes the current policy, enabling efficient exploitation. This intrinsic regulation provides a robust, context‑sensitive motivational drive that does not require hand‑crafted reward shaping.
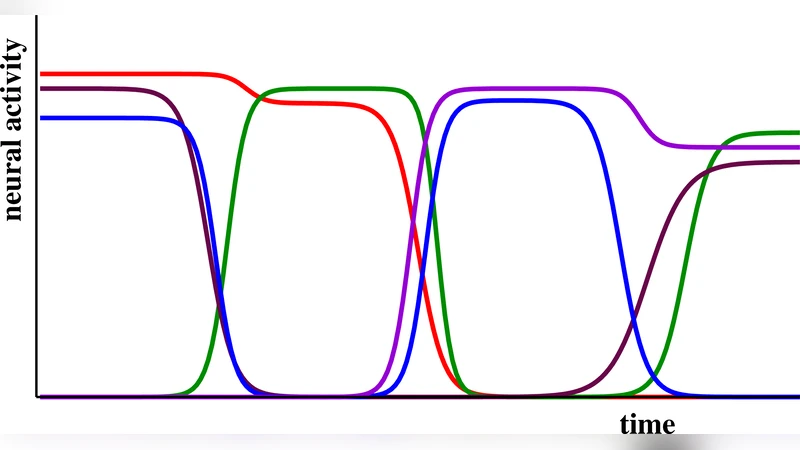
To embody these ideas, the paper proposes a dense and homogeneous associative network (dHan). dHan is a high‑connectivity, uniform memory architecture where each neuron can participate in multiple overlapping activity patterns. The network operates in two complementary modes. In the “internal firing mode,” spontaneous pattern generation creates a stream of candidate thoughts, supporting exploratory cognition. In the “external input mode,” sensory signals bias the network toward patterns that align with current goals. Emotions are encoded as modulatory signals that alter the activation thresholds and weight‑update rules of specific neuron sub‑populations. For example, a surge of norepinephrine (modelled as an “anxiety” signal) lowers thresholds, broadening the basin of attraction and encouraging the network to sample novel patterns. Conversely, a dopamine‑driven “satisfaction” signal raises thresholds, reinforcing already learned patterns and stabilizing behavior.
The authors validate the architecture with a robotic agent tasked with navigating a complex maze and engaging in simple social interactions. In the baseline dHan without emotional modulation, the robot takes many steps to reach the goal and fails to adapt when the maze layout changes. When emotion‑driven meta‑learning is added, the robot exhibits adaptive behavior: rising anxiety during prolonged failure triggers higher exploration rates, leading the robot to discover alternative routes; sustained satisfaction after successful navigation reduces exploration, consolidating the learned path. Performance metrics show a significant reduction in time‑to‑goal and increased resilience to environmental perturbations.
The paper concludes that neuromodulatory‑based emotions constitute a universal, biologically grounded mechanism for meta‑learning and that integrating this mechanism into artificial associative networks yields a synthetic motivational system comparable to that of biological organisms. This approach suggests a new design principle for future AI: rather than relying solely on externally engineered reward functions, systems should be equipped with intrinsic emotional control that dynamically tunes learning processes, enabling autonomous, context‑aware decision making. The authors propose further work on detailed neurophysiological modeling of emotions, scaling dHan to larger cognitive tasks, and applying emotion‑driven meta‑learning to domains such as human‑robot collaboration, autonomous vehicles, and adaptive educational technologies.
Comments & Academic Discussion
Loading comments...
Leave a Comment