Kinematic Analysis of a Serial - Parallel Machine Tool: the VERNE machine
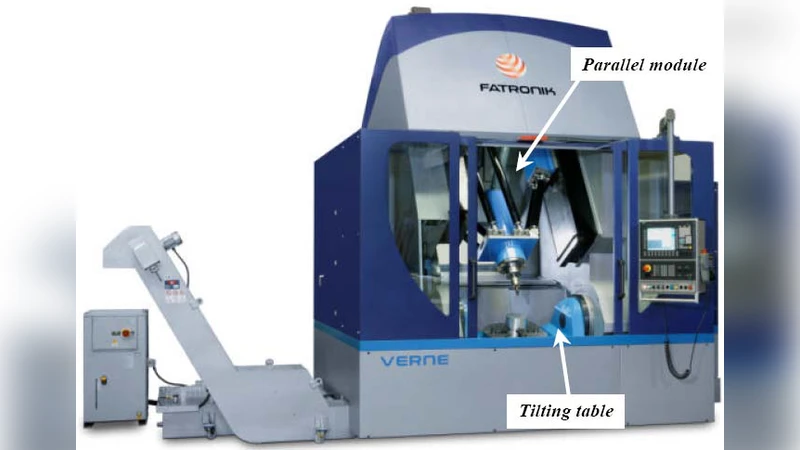
The paper derives the inverse and the forward kinematic equations of a serial - parallel 5-axis machine tool: the VERNE machine. This machine is composed of a three-degree-of-freedom (DOF) parallel module and a two-DOF serial tilting table. The parallel module consists of a moving platform that is connected to a fixed base by three non-identical legs. These legs are connected in a way that the combined effects of the three legs lead to an over-constrained mechanism with complex motion. This motion is defined as a simultaneous combination of rotation and translation. In this paper we propose symbolical methods that able to calculate all kinematic solutions and identify the acceptable one by adding analytical constraint on the disposition of legs of the parallel module.
💡 Research Summary
The paper presents a comprehensive kinematic study of the VERNE machine, a five‑axis hybrid tool that combines a three‑degree‑of‑freedom (3‑DOF) parallel module with a two‑DOF serial tilting table. The parallel module consists of a moving platform linked to a fixed base by three non‑identical legs. Because the legs differ in length, attachment points, and joint configurations, the mechanism is over‑constrained: the three legs interact in such a way that the platform undergoes a coupled rotation‑translation motion rather than pure translational or pure rotational motion typical of conventional Stewart platforms.
The authors first formalize the geometry of each leg using symbolic parameters. For leg i (i = 1, 2, 3) the length constraint is expressed as ‖P − Bᵢ‖² = Lᵢ², where P denotes the platform reference point, Bᵢ the base attachment point, and Lᵢ the leg length. Because the legs are non‑identical, the rotation matrices that map the platform frame to each leg’s local frame appear with different elements, leading to three coupled nonlinear equations.
In the inverse‑kinematic analysis the desired platform pose (position and orientation) is prescribed, and the required leg lengths and joint angles are solved. The solution procedure incorporates additional geometric constraints that guarantee physical feasibility: limits on actuator stroke, joint rotation ranges, and, crucially, avoidance of leg‑leg interference. The latter is handled by deriving inequalities that bound the projected angles and distances between legs in the plane of each leg, effectively eliminating configurations where the legs would intersect or collide. By applying these constraints, the method filters out the many mathematically possible solutions, retaining only those that can be realized on the actual machine.
The forward‑kinematic problem is tackled next. Starting from known leg lengths and joint angles, the platform pose is recovered by solving the same set of nonlinear equations. In general, an over‑constrained parallel mechanism can admit eight to twelve algebraic solutions. Using the same analytical constraints as in the inverse case, the authors systematically discard spurious solutions, leaving a unique physically admissible pose for each feasible set of actuator inputs. Symbolic computation tools (Maple/Mathematica) are employed to obtain explicit existence conditions for each solution branch, and a numerical example illustrates how the workspace is partitioned into regions with different numbers of admissible solutions. Sensitivity analysis shows how variations in leg lengths affect the reachable pose and highlights zones where the mechanism becomes singular or loses stiffness.
Beyond the specific VERNE machine, the paper contributes a general framework for handling over‑constrained hybrid mechanisms with non‑identical legs. By combining symbolic derivation of the kinematic equations with analytically derived feasibility constraints, the authors demonstrate that all possible kinematic solutions can be enumerated and the physically viable one selected without resorting to iterative numerical guesses. This approach is valuable for the design, optimization, and control of complex serial‑parallel machines where traditional Stewart‑type analysis is insufficient.
The authors conclude by outlining future work: extending the symbolic model to dynamics (including inertia and actuator forces), performing vibration and modal analysis, and integrating the kinematic solver into real‑time control loops. The presented kinematic foundation thus paves the way for accurate trajectory planning, high‑speed machining, and robust error compensation in the VERNE machine and similar hybrid tool structures.