Infinite Bar-Joint Frameworks
Some aspects of a mathematical theory of rigidity and flexibility are developed for general infinite frameworks and two main results are obtained. In the first sufficient conditions, of a uniform local nature, are obtained for the existence of a prop…
Authors: J.C. Owen, S.C. Power
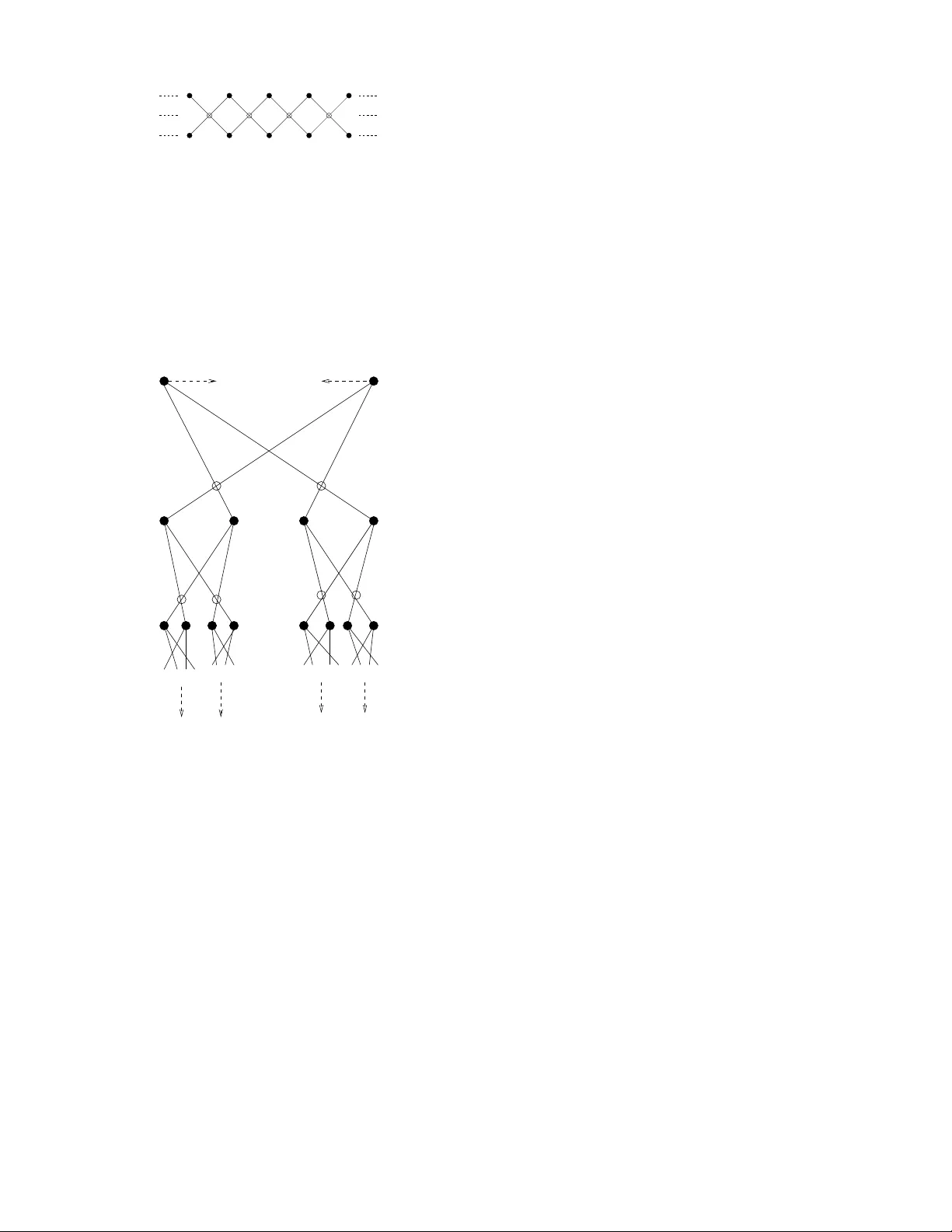
Infinite Bar -Joint Framew orks J .C. Owen D-Cubed, Siemens PLM Software Ltd., P ark House, Castle P ark , Cambridge, U .K. ow en.john.e xt@siemens.com S .C. P ow er Depar tment of Mathematics and Statistics Lancaster University Lancaster , U .K. s.po wer@lancaster .ac.uk ABSTRA CT Some aspects of a mathematical theory of rigidity and flexi- bilit y are d evelo p ed for general infinite frameworks and t wo main results are obtained. In the first sufficient conditions, of a uniform lo cal nature, are obtained fo r the existence of a prop er flex of an infin ite framew ork. In th e second it is sho wn how con tinuous paths in the plane may be sim ulated by infinite Kemp e link ages. Categories and Subject Descriptors J.2 [ Ph ysical Sciences and Engi neering ]: Mathemat- ics and St atistics; J.6 [ Computer Aided Engineering ]: Computer-aided design (CAD ) General T erms Infinite Eq uation S ets, Materials Analysis, Geometric Con- strain ts Keyw ords bar-join t framew ork, rigidit y matrix, rigidit y operator, com- pactness, Kemp e link age 1. INTR ODUCTION W e describe some results and w ork in progress in the anal- ysis of infinite bar-join t framew orks, their constrain t systems and their solution spaces. In particular we are interes ted in forms of flex ib ilit y and rigidity . The behaviour of some physica l systems, suc h as flexible materials (e.g. foam [4]) or th e p ositioning of large arrays of compon ents in an engineering design, may b e app roximated by a large number of p olynomial eq uations and effectively mod eled by an infinite equation set. Recently Deshpand e et al [4], Guest and Hutchinson [9 ], Donev and T orquato [5] and others have considered rigidity issues for infinite p eri- odic lattice structures t h at are of significance for material analysis. There is a w ell-established connection betw een the Permission to make digital or hard copies of all or part of this work for personal or cl assroom use is granted without fee prov ided that copie s are not made or distrib uted for profit or commercial adv antage and that copie s bear this notic e and the full cit ation on the first page. T o cop y otherwise , to republi sh, to post on serv ers or to redistrib ute to lists, req uires prior specific permission and/or a fee. SAC ’09 March 8-12, 2009 , Honolulu, Haw aii, U. S.A. Copyri ght 2009 A CM 978-1-60558-166-8 /09/03 ... $ 5.00. rigidit y theory of p in-joined structures and geometric con- strain t equations f or finite systems and we ex p ect that a more general study of infin ite framewo rks will hav e relev ance for infinite systems of geometric constraints. In this article we take a fundamentally mathematical per- sp ective and la y dow n a v ariet y of examples, definitions and concepts to identify some of the dive rsity of infinite frame- w orks per se, whether p eriodic or not. There are sev eral mo- tiv ations for this. The sub ject in itself, as a mathematical topic, is no vel, in triguing and hybrid, and is able to draw on established rigidity theory for inspiration and conjectures. Secondly , there are diverse areas of mathematics that can b e brought to b ear or whic h are ap p ropriate for restricted classes of framewo rks. F or example rigidity matrices, be- ing now infinite, can b e viewe d as op erators on app ropriate restricted spaces of flex vectors , and so are amenable t o op- erator theory meth od s and functional analysis p erspectives. Thirdly w e exp ect that the analysis of p erio dic and ap eri- odic stru ctures can b en efi t by being set in a more general area of analysis whic h in turn will lead naturally to the con- sideration of robust forms of rigidity . Examples are imp ortant. W e gi ve several contrasting ex- amples together with a range of concepts and terminology aimed at differentiating some of the rich va riety of frame- w ork types. W e foll ow this wi th tw o main results. T he first, with full pro of, illustrates one wa y in which topolog- ical compactn ess in function sp aces can b e useful. Here it assists in establishing sufficient conditions for the contin uous (real) flex ibilit y of an infi n ite framew ork. T he second result is inspired b y th e ce lebrated 1876 link age constru ction of Kemp e who show ed that a finite link age (a tw o-dimensional bar-join t framewo rk with one d egree o f fl exibilit y) can b e designed to sim ulate a giv en algebraic curve. See also Gao et al [7]. Here w e sh ow how infin ite framew orks can sim u- late contin uous functions, once again, with zero error, and w e provide outline pro ofs. F or div erse discussions of fin ite framework rigidit y and constrain t systems see, for example, [1], [8], [13], [14], [15], [16], [17], [20]. 2. EXAMPLE S W e define a (coun table) infinite (bar-joint) fr amework in R d to be a pair G = ( G, p ) where G = ( V , E ), the abstract graph of G , h as countable v ertex set V and edge set E , and where p = ( p 1 , p 2 , . . . ) with p i ∈ R d for all i , is the fr amework ve ctor of G associated wi th an enumeration V = { v 1 , v 2 , . . . } . The fr amework e dges of G are the unordered straigh t line seg ments [ p i , p j ] for ea ch i, j with ( v i , v j ) an edge of G . The follo wing example in one dimension is revealing. Let ( G, p ) b e t he infin ite framework in R with framew ork vector p = ( p 1 , p 2 , . . . ) and framew ork ed ges [ p n , p n +1 ] for all n . The abstract graph G here is a tree with a single branch and a single v ertex of degree 1. Tw o such linear fra meworks ( G, p ) and ( G, q ) are eq uiv alent if | q n − q n +1 | = | p n − p n +1 | , for n = 1 , 2 , . . . , and are congruent if for some isometry of T o f R , we hav e q n = T p n for all n . Recal l th e fact that for every real num b er α ∈ R there is a sequen ce a 1 , a 2 , . . . with a n = 1 or − 1 for all n , such that α = P ∞ n =1 a n n − 1 . Thus the framew ork with vector p = (0 , 1 , 1 − 1 / 2 , 1 − 1 / 2+1 / 3 , ... ), has uncountably man y pairwis e noncongruent equiv alent frame- w orks (ob t ained by fl ipping edge directions). F rom this, and analogous infinitely folding framew orks in higher dimen- sions, we also easily see that a con tinuously rigid framew ork (formally defin ed b elow) ma y p ossess uncountably many pairwise noncongruent equiv alent framew orks th at are ǫ - close (in the sense of Definition 3.2). 2.1 Diminishing Rectangles Let G 1 = ( G, p ) be the infinite p lanar framew ork in Figure 1. W e ma y label it with p 0 = (1 , − 1 / 4), p 1 = (1 , 0) , p 2 = (1 , 1) , p 3 = ( 1 2 , 0) , p 4 = ( 1 2 , 1 2 ) , p 5 = ( 1 3 , 0) , p 6 = ( 1 3 , 1 3 ), and so on, with edges [ p i , p i +1 ], for i o dd, with edges [ p i , p i +2 ] for all i ≥ 1, and with the indicated edges to p 0 whic h hav e the effect of ”rigidifying” the x - axis edges. p6 p5 p4 p3 p2 p1 p0 Figure 1: A n inflexibl e framework. Supp ose for th e momen t that p i ( t ) , i = 0 , 1 , 2 , . . . are con- tinuous fun ctions from [0 , 1] to R 2 , with | p i ( t ) − p j ( t ) | = | p i − p j | for all t and all framew ork edges [ p i , p j ]. W e may supp ose moreo ver that p i ( t ) = p i for all t ∈ [0 , 1] and i od d. Then i t can b e prove n th at p i ( t ) = p i for all t and all i even. That is, the c ontinuous flex p ( t ) = ( p 1 ( t ) , p 2 ( t ) , . . . ) must b e constan t. The reason fo r this, rou gh ly speaking, is that the flexible rectangular subframew ork determined by p i , p i +1 , p i +2 , p i +3 , for i = 1 , 3 , 5 , . . . , has a limited flexibil- it y , tending to zero as i tends to infinity , and since flexes prop ogate linearly no contin uous flex of p 2 (and hen ce of any p i ) is admissible. 2.2 Cobweb Graph Framework s Let G 1 b e the square frame frame work with framework p oints { p 1 , . . . , p 4 } = { (1 , 1) , (1 , − 1) , ( − 1 , − 1) , ( − 1 , 1) } . Let G ∞ b e the framew ork which, roughly speaking, con- sists of the union G 1 ∪ 1 2 G 1 ∪ 1 4 G 1 ∪ . . . together with con- nected edges b etw een the corresp onding corners of consecu- tive squares. Then w e call G ∞ the dyadic c obweb fr amework and w e hav e G ∞ = ( G ∞ , p ) where the abstract graph G ∞ is a cobw eb graph. I t can b e shown that while every fi nite subframew ork of G ∞ is continuously flexible, G ∞ itself is not, aga in for reasons of va nishing flexibilit y , although in this (less intuitiv e) case some geometric analysis is needed. Figure 2: T he dyadic cob web framework. The similar framework G ∞ whic h is constructed on the framew ork p oints of G 1 ∪ 2 G 1 ∪ 4 G 1 ∪ . . . is con tinuously flexible, while the tw o-wa y infinite framewo rk G ∞ ∞ = G ∞ ∪ G ∞ is rigid. F rom a mathematical p ersp ective (and p erhaps also from other persp ectives) the cob web framewo rk G ∞ is in teresting in th at it admits a proper flex which is increasingly negligible to wards infinit y . W e see an opp osite amplifying effect in th e next example. 2.3 Lattice Flexing It is straigh tforwa rd to construct a finite framew ork with one degree of flexibility which ’sim ulates’ tw o rigid bars join ted at their midp oints. F or example tak e four equal length framework edges joined at a common centra l frame- w ork p oint and add t w o ”extraneous” vertices an d six edges to force them to b e colinear in t wo pairs. Similarly we can simulate tw o rigid bars jointed at any interi or p oints. Co catenating infinitely many such ’t weezer’ compon ents leads to framew orks with one degree of flexibil- it y . Co catenating identical comp onents leads to the infinite wine rack in the diagram. (The op en circles in Figure 3 indicate interior jointing of rigid bars.) Note that an y prop er flex p ( t ) = ( p 1 ( t ) , p 2 ( t ) , . . . ) of the infinite winerac k is unb ounde d in the sense that for each t > 0 the sequ en ce p ( t ) − p (0) is not a b oun ded sequ ence. Figure 3: The infinite winerack framewor k. One can assemble infin itely many tw eezer comp onents in all manner of interesti ng wa y s. I n particular one may ar- range the total edge length sum to be fin ite while main tining flexibility (despite the presence of arbitrarily small rectan- gles). On e can also arrange tree structu red assem blages G with Cantor set top ological b oundaries which ex h ibit inter- esting dynamics under framew ork flexing. An example of this is the Cantor tree framew ork in Figure 4. Figure 4: C a ntor tree t weezer framew ork. 2.4 P eriodic Frameworks Spatially p erio dic framew orks are, of course, ubiquitous, app earing, for example, in the mathematical mo dels under- lying crystallograph y and p olymer framew orks, in th e real finite wo rld of space structures, and in the pure math emati- cal realm of planar tilings [10]. Simply en umerating p erio dic tetrahedral framew orks (of interest for hypoth etical tetra- hedral S iO 2 ) is a ma jor pro ject (for which see T reacy et al [19]). H ow ever, as Donev and T orquato and others hav e ob- serve d there has b een little developmen t of rigidity theory for truly p erio dic (and hence infin ite) frameworks. W e do not comment further on this here except to refer th e reader to Deshpand e et al [4], Guest and H u tchinson [9], and Donev and T orquato [5], for examples of in terest in materials analysis, and to remark th at some actual space structures are, in a manner of sp eaking, almost infinite. (The dome of the S p orts P alace Sant Jordi in Barcelona w as assem bled from 9070 bars and 2343 join ts [16].) 3. RIGIDITY AND RIGIDITY OPERA TORS Definition 3.1. F r ameworks G = ( G, p ) and G ′ = ( G ′ , p ′ ) ar e equiv alent if ther e is a gr aph i somorphism π : G → G ′ such | p i − p j | = | p ′ π ( i ) − p ′ π ( j ) | for al l e dges ( v i , v j ) of G (wher e v ′ π ( i ) = π ( v i ) ). The fr ameworks ar e congruent if T p i = p ′ π ( i ) for al l i for some p ermutation π and isometry T of R d . F or a useful discussions of equiv alence in the finite case, including the problem of unique rigidit y (or global rigidit y), in whic h equiv alent framew orks are necessarily congru ent, see Connelly [2]. Definition 3.2. A fr amework ( G, p ) is ǫ -rigid whenever ( G ′ , p ′ ) is an e quivalent fr am ework (with e quivalenc e map π = identity) and | p i − p ′ i | ≤ ǫ for al l i , then ( G, p ) and ( G ′ , p ′ ) ar e c ongruent. A fr amework ( G, p ) is p ertu rbation- ally rigid if it is ǫ -r igid for some ǫ > 0 . The concept of ǫ -rigidit y w as in tro duced in th e pioneering pap er of Gluck [6] for finite framew orks. F or fi nite frame- w orks it was sho wn by Gluck to b e equiv alent to contin uous rigidit y , as expressed in the next definition, and also, in the case of generic framew orks, to infinitesimal rigidity , as ex- pressed in the sub sequent one. (A generic finite framework is on e whose framew ork point co ordinates are alg ebraically indep endent ov er the rational numbers.) It is con venien t t o restrict to tw o-dimensional framew orks. Definition 3.3. L et ( G, p ) b e a (p ossibly infinite) fr ame- work in R 2 with c onne cte d abstr act gr aph G = ( V , E ) . Le t V = { v 1 , v 2 , . . . } and p = ( p 1 , p 2 , . . . ) . Then (a) ( G, p ) is said to b e flexible, or mor e pr e ci sely, c ontinu- ously flexible, wi th a (pr op er) c ontinuous flex p ( t ) if ther e ex- ists a function p ( t ) = ( p 1 ( t ) , p 2 ( t ) , . . . ) fr om [0 , 1] to Q V R 2 with the fol lowing five pr op erties. (i) p (0) = p , (ii) e ach c o or dinate function p i ( t ) is c ontinuous, (iii) for some b ase e dge ( a, b ) with | p a − p b | 6 = 0 , p a ( t ) = p a (0) and p b ( t ) = p b (0) f or al l t , (iv) e ach e dge distanc e is c onserv e d; | p i ( t ) − p j ( t ) | = | p i (0) − p j (0) | for al l e dges ( v i , v j ) , and al l t , (v) p ( t ) is not a c onstant function. (b) The f r amework ( G, p ) is ri gid (or c ontinuously ri gid) if it is not flexible, that is, i f it has no (pr op er) c ontinuous flex. W e h a ve already seen from our elemen tary linear examples that p erturb ational rigidity may fail rather sp ectacularly for a con tinuously rigid framew ork. This can also b e seen in a similar wa y for the simple infi nite framew ork suggested by Figure 5 (and this framew ork is ”regular” in th e terminology b elo w). If (instantaneous velocity) vectors u 1 , u 2 , . . . in R 2 hav e the property ( p i − p j ) . ( u i − u j ) = 0 f or all i, j then the vector u = ( u 1 , u 2 , . . . ) in the infin ite dimensional v ector space H v = R 2 ⊕ R 2 ⊕ . . . is called an infinitesimal flex . W e maintain this traditional terminology for infinite frame- w orks even though u may b e an unbounded sequence. Ev- ery framew ork in R 2 has a three-dimensional subspace of infinitesimal flexes coming from isometric motions ( spatial isometries). Any nonzero infinitesimal flex not in th is space is a pr op er i nfinitesimal flex . Figure 5: Ri gid but not ǫ -rigid for all ǫ . Definition 3.4. An i nfinite fr amework ( G, p ) is infinites- imally rigid if it has no pr op er infinitesimal flexes and is infinitesimally flex ib le otherwise. The dyadic cob web framew ork has infinitely many in- finitesimal motions b ecause of its symmetries (which allow evident ”local infinitesimal rotations”), but even a generic cobw eb framew ork retains a prop er infinitesimal flex. (By generic here we mean m erely th at eac h fin ite subgraph is generic.) So, in contrast with th e finite case, generic infi- nite framew orks ma y be continuously rigid without b eing infinitesimally rigid. A lso infinitesimal rigi dity and pert u r- bational rigidity differ, so the three d efinitions are pairwise inequiv alent in general. W e no w indicate briefly b elow how the t h ree d efinitions also ha ve conditional forms that are appropriate to infinite framew orks. The follow ing terminology is useful. Let G = ( G, p ) b e an infinite framework with countably many edges and vertices, and let e 1 , e 2 , . . . b e an enumeratio n of the edges. Let d e = d ij b e the separation | p i − p j | for the edge e = ( v i , v j ). Say that G is e dge vanishing (respectively e dge unb ounde d ) if the sequence ( d e i ) ∞ i =1 has no low er b ound δ > 0 (respectively no upp er b ound ), and say th at G is r e gular if a low er b oun d δ > 0 and an upp er b ound M > 0 exist. W e also sa y that G is b ounde d or unb ounde d if the sequence p has this prop erty . Also G is lo c al ly finite if each vertex of V has finite degree. In particular, p eriod ic framew orks, with a rep eating finite cell ([4],[5],[9]), are regula r and locally fi nite. In the case of edge v anishing framewo rks in many respects it is appropriate to take into account lo cal scales when con- sidering a p erturb ed or nearby framew ork. T o quantify this let m i = inf j d ij , M i = su p j d ij . W e say that a locally fin ite framew ork G = ( G, p ) is r elatively ǫ -rigid if every equiv alen t framew ork G = ( G, p ′ ) (with π =id) such | p ′ i − p i | ≤ ǫm i for all i is congruent to G . It is natural then (particularly in the ligh t of the simple on e- dimensional example ab o ve) to determine conditions for rela tively ǫ -rigidity . Similarly , one can consider cond itional forms of infinitesi- mal rigidit y (resp. contin uous rigidity) by restricting atten- tion to sp ecific subspaces of infinitesimal (resp. contin uous) flexes whic h, for example, may decay at an appropriate lo- cal rate. Or, if one is concerned with decaying flexes in a regular framew ork, one ma y imp ose square summable de- ca y . These and similar p ersp ectives amoun t to considering the rigidit y matrix (and related matrices of the framew ork equation sy stem) as a b oun ded linear operator, the rigidity op er ator b et wee n appropriate sequ ence spaces. Recall that th e ri gidity matrix R ( G, p ) of a framework ( G, p ) is the Jacobian of th e sy stem of framew ork edge- length equations multiplied b y 1 / 2 and ev aluated at the framew ork p oints. W e take the same defi n ition for countable framew orks. Th us rows are indexed by edges and columns by th e co ordinates x i , y i of p i , i = 1 , 2 , . . . . (The entry for the edge ( v i , v j ) and the co ordinate x i is ( x i − x j ) etc.) One may consider ”conditioning” infinitesimal flexes u = ( u 1 , u 2 , . . . ) by requiring that they lie in the vector space ℓ ∞ v of b oun ded sequen ces. (This rules out infi nitesimal rotations of unb ounded framewo rks for example.) F or a regular frame- w ork the rigidit y matrix actually determines a b oun ded lin- ear transformation R ( G, p ) ∞ , ∞ from ℓ ∞ v to ℓ ∞ e . Moreo ver w e may require boun ded displac ements of framew ork p oin ts whic h amounts to a further restriction on the domain of R ( G, p ). This applies in particular to the infi n ite winerac k framew ork; the natural ”squeeze” infinitesimal flex, while b eing a b ound ed sequence do es not giv e boun ded displace- ments of framew ork p oints. In this sense t he winerac k is a b ounde d ly isostatic fr amework . Finally , note that the framew ork of Figure 5 while b eing infinitesimally rigi d and continuously rigid has the ”flav our” of an infinitesimally flexible structure. The follo wing defi- nition gives a natural n otion of approximate flexibility to capture this and which we exp ect to lead to a useful form of str ong rigidity . Definition 3.5. A fr amework ( G, p ) is appr oximately flex- ible i f for every ǫ > 0 ther e is a pr op er flex u with | ( u i − u j ) . ( p i − p j ) | ≤ ǫ ( | u i | + | u j | )( | p i − p j | ) for al l e dges v i , v j ) . A f r amework ( G, p ) is str ongly rigid if it is not appr oximately flexible. 4. COMP A CTNESS AND PROPER FLEXES If an infin ite framewo rk has flexible finite subframewor ks then u nder what conditions might one conclude the exis- tence of a prop er (contin uous) flex ? The dyadic cobw eb framew ork G ∞ whic h is inflexible, with all its finite sub- framew orks flexible, s hows t hat some care is n eeded here. In this section we giv e a sample theorem whic h resolves this question. It is stated and d iscussed for planar framew orks but holds for h igher dimensions with the same pro of. The proof mak es use of the Ascoli-Arzela compactness theorem in the fo llow ing form. A b ounded equicon tinuous sequence of functions f k : [0 , 1] → R n , k = 1 , 2 , . . . has a conv ergent subsequence. (See [18] or [3] for example.) Definition 4.1. A c ontinuous flex p ( t ) of a normali se d fr amework is a smo oth flex if e ach c o or dinate p i ( t ) is di f- fer entiable on [0 , 1] with c ontinuous derivative p ′ i ( t ) , wher e p ′ i (0) and p ′ i (1) ar e right and lef t derivatives r esp e ctively. F urthermor e a smo oth flex i s a b ounde d ly smo oth flex, or M -smo oth flex, if for some M > 0 and for every p air p i , p j the distanc e function d ij ( t ) = | p i ( t ) − p j ( t ) | has b ounde d derivative, with | d ′ i,j ( t ) | ≤ M for al l t in [0 , 1] . Let ( G, p ) be an infinite lo cally finite framew ork in R 2 with connected graph and with n ormalised framew ork vector p , in the sense that p 1 = ( 0 , 0) , p 2 = ( d e 1 , 0). Let u s say that a standar d chain for ( G, p ) is any sequence of vertex indu ced connected subframew orks ( G 1 , p ) ⊆ ( G 2 , p ) ⊆ . . . whose union is ( G, p ). Denote the separation distance | p i − p j | by d i,j . The follo wing th eorem, in paraphrase, sa ys that th ere will b e a proper con tinuous flex of the infinite framew ork if there are t wo framew ork points suc h that every finite framewo rk conta ining them has at least one smooth flex which c hanges the separation of these points, and these separation c hanges are boun ded a wa y from zero. In general these smooth flexes need not b e related and indeed the en tire framew ork could hav e, loosely sp eaking, many ( and eve n infinitely many) de- grees of freedom. Theorem 4.2. L et ( G, p ) b e an infinite lo c al ly fini te pla- nar f r amework with c onne cte d gr aph, let ( G 1 , p ) ⊆ ( G 2 , p ) ⊆ . . . , b e a standar d chain and let v i , v j b e vertic es of G 1 . Sup- p ose that ther e exist M > 0 and c > 0 and a se quenc e of M -smo oth (normalise d) flexes p ( r ) ( t ) of ( G r , p ) , for r = 1 , 2 , . . . , such that for al l r | d ( r ) i,j (1) − d ( r ) i,j (0) | ≥ c. Then ( G, p ) is c ontinuously flexible. The p roof is constru cted as an iterated application of the Ascoli-Arzela th eorem and a stand ard diagonal selection to create a sequen ce of co ordinate functions ( q k (1 , 1) 1 ( t ) , q k (2 , 2) 2 ( t ) , . . . ) whic h (although not infinite flexes) conv erge (u niformly in coordinates) to a p rop er flex q ∗ ( t ) as k ( n, n ) tends to infinity (with n ). The inequality ensures th at the resulting limit flex is not trivial. Pr oof. Let F l b e t he set of all M - smooth flexes q : [0 , 1] → R 2 | V l | for ( G l , p ). This is a nonempty family of con- tinuous v ector-v alued functions which are, moreo ver, equ icon- tinuous. Let q ( r ) ( t ) , r = 1 , 2 , . . . , b e th e given sequence of M -smo oth flexes. Each of these flexes restricts to a flex of th e first subframew ork ( G 1 , p ). W e can write these re- strictions as P 1 q ( r ) ( t ) where P 1 is the natural pro jection from the space o f infinite framework vectors to the space determined by the co ordinates for G 1 . This set of restric- tions is a b ounde d set of equ icon tinuous vector-v alued func- tions in F 1 . This follo ws from the h yp otheses on d eriv a- tives. By the A rzela-Ascoli theorem there is a uniformly conv ergen t subseq u ence, d etermined by some subsequence k ( 1 , n ) , n = 1 , 2 , . . . of k = 1 , 2 , . . . . That is w e hav e ob- tained a subsequen ce q ( k (1 ,n )) ( t ) , n = 1 , 2 , . . . , with the G 1 coordinates a ctually conv erging t o a fl ex of the su b frame- w ork ( G 1 , p ). Likew ise considering the restrictions P 2 q k ( t ), for k = k (1 , n ) , n = 1 , 2 , . . . , there is a subsequence of this subsequen ce, sa y k ( 2 , n ) , n = 1 , 2 , . . . such that th e restrictions P 2 q k (2 ,n ) ( t ) conv erge uniformly to a contin uous flex of ( G 2 , p ) as n → ∞ . Con tinue in this m an n er for the entire standard c hain, and select the diagonal subsequence k ( n, n ). This has t h e prop- erty that for eac h coordinate location, m sa y , the sequence of co ordinate function q ( k ( n,n )) m ( t ) for n = 1 , 2 , . . . conv erges uniformly to a con tinuous function q ∗ m ( t ) as n → ∞ . More- o ver the function q ∗ ( t ) = ( q ∗ 1 ( t ) , q ∗ 2 ( t ) , . . . ) is the desired flex. Note in particular that this limit is a prop er flex since the inequality p ersists in the limit, th at is, || q ∗ i (1) − q ∗ j (1) | − | q ∗ i (0) − q ∗ j (0) || ≥ c. In fact stronger forms of this th eorem h old. F or exam- ple it is enough to require that for r = 1 , 2 , . . . , there are smooth fl ex es p ( r ) ( t ) of ( G r , p ) suc h that for eac h l the set of restrictions of p ( r ) ( t ) to ( G l , p ), for r ≥ l , are uniformly b oundedly smooth . This sc heme is appropriate for fl exible framew orks similar to or con taining an infin ite winerack. 5. INFINITE KEMPE LINKA GES W e state a theorem d ue to Kempe [12] a nd follow this with a discussion of exactly what the theorem means and the principal ideas b eh in d the pro of. Theorem 5.1. Every fini te al gebr aic curve i n the plane has a linkage r e alisation. Although Kemp e do es not define a link age as a mathemat- ical construct one may view it, in the spirit of Asimo w and Roth [1], as a bar-joint framew ork whose (normalised) p osi- tions giv e a real v ariet y whic h is one dimensional (at regular p oints). W e take the follow ing more conv enient linke sque view which also serv es for infinite framew orks. W e let h , i denote the usual inn er pro du ct of real vectors. Definition 5.2. A plane linkage (r esp. infinite plane linkage) is a fini te (r esp. infinite) c onne cte d fr amework G = ( G, p ) in R 2 with a de gr e e two vert ex v 1 with e dges ( v 1 , v 2 ) , ( v 1 , v 3 ) and a c ontinuous flex p ( t ) such that (i) the c osine angle function g ( t ) = h p 2 ( t ) − p 1 ( t ) , p 3 ( t ) − p 1 ( t ) i is strictly incr e asing and (ii) p ( t ) i s the unique flex q ( t ) of G with q i ( t ) = p i ( t ) , i = 1 , 2 , 3 . Mak e a partial normalisation by requiring that p 1 and all p 1 ( t ) are equal to the origin (0 , 0). W e may th ink of a fi- nite link age articulating a motion as the p oints p 2 ( t ) , p 3 ( t ) make changing angles θ , φ, resp ectively , with the x axis. The framew ork p oints mov e smo othly if ( θ , φ ) mo ve smo othly . Identifying a specific ”end-p oint” p n of the fra mework, if ( θ , φ ) mov es smo othly in a one-dimensional (real) algebraic v ariet y then the end p oint p n ( θ , φ ) describ es an algebraic curve. In partic ular, with φ fixed, a ”circular i npu t” via θ gives an algebraic curve p n ( θ , φ ) with θ ranging in some interv al. Kemp e solv ed the inve rse problem by show ing that any particular fi nite algebraic curve ma y b e realised as such a link age curve for some link age. The conv enience of the double angle parametrisation comes from the use of parallellogra m and qu adrilateral linka ges in the assem bly of comp osite li nkag es. Kemp e’s original construction (which simulates an alge- braic output curve from a linear inp u t) ma y b e conceived of as a combinatio n of th e follo wing four stages. 1. A parallelogram link age L 1 = ( R , q ) with q 1 rooted at the origin, q 4 on a given algebraic curve, p ro vides a ( θ , φ ) (virtual) curve; Φ( θ , φ ) = 0. 2. The observ ation that Φ( θ, φ ) = 0 translates into a multiple angle equation of the form C = X A n cos( r n θ + s n φ + t n ) . W rite f ( θ , φ ) for the function giv en by this fin ite su m. 3. The construction of a linkag e L 2 so that for input an- gles θ, φ the x coordinate of the endp oint p n ( θ , φ ) is f ( θ , φ ). It is in this stage that Kemp e uses an assem bly argument, indicating basic comp onent link ages (translator, multiplier, etc) and how they may be com bined. See also Gao et al [7]. 4. L 1 , L 2 are joined together at the origin and their re- sp ective edges, incident to the origin, joined appropriately . Thus the outpu t angles ( θ , φ ) from L 1 b ecome inpu t angles for L 2 . As q 4 mo ves on th e curve p n mo ve on th e vertical line x = C , and v ice versa. (One m ust also add framew ork struc- ture to this join to fix t h e origin to a ”b ase edge” parallel to the line x = C and so create a free stand ing linkag e.) If an infinite link age ( G, p ) is such t h at a subsequence p n k , k = 1 , 2 , . . . is conv ergen t to p ∗ , say , then th e flex gives rise to a contin uous plane curve p ∗ ( t ). A sample in verse result, in t h e spirit of K emp e’s theorem, is giv en in the fol- lo wing. W e sa y that the infinite framework ( G, p ) is p ointe d if p is a converg ent sequence a nd if the sequen ce of e dge lengths tends to zero. Theorem 5.3. L et f ( t ) , t ∈ [0 , 2 π ] b e a c ontinuous r e al- value d f unction with absolutely summable F ourier series. Then the gr aph of f has an infinite linkage r e alisation by a p ointe d lo c al ly finite linkage ( G, p ) . The pro of follow s a similar format to the breakd ow n ab ove, although now the sum is infinite, and some mo dified assem- bly components are needed to ensure th at edge lengths di- minish to zero. A consequence of t he theorem is that th e m otion of limit p oints of normalised in fi nite link ages may fail to b e contin- uously differentiable in every finite interv al. In fact, more generally , we h av e found an assembly scheme, based on u niform approximation rather than F ourier series, whic h creates an infinite link age which realises (with no er- ror) a giv en contin uous cu rve. Moreov er, if one admits non locally finite linka ges, p ossessing a single framew ork p oint with infinite degree, then w e can arrange that this p oint coincides with the curve tracing limit p oint abov e. In this w ay w e can obtain the foll owing theorem. Recall that a conti nuous planar curve (with parametrisa tion) is a contin- uous function from [0 , 1] to R 2 . In particular such a curv e can be space filling and so these mathematica l link ages are distinctly curious: with a single input flex a distinguished framew ork p oin t may v isit every p oint in a region of p ositive area ! Theorem 5.4. Every c ontinuous planar curve has an in- finite linkage r e alisation. 6. REFERENCES [1] L. Asimow and B. Roth, The rigidit y of graphs, T rans. Amer. Math. So c., 245 (1978) 27 9-289. [2] R. Connelly , On generic global rigidity , D IMACS Series in Discrete Mathematics and Th. Comput er Sci., 4 (1991) 147-155. [3] K.R. Da vidson and A. P . Donsig, Real Analysis with Real Applications, Prentice Hall, 2002. [4] V.S. Deshpande, M.F. Ashby , N.A. Flec k, F oam top ology: Bending versus stretching dominated arc hitectures, Acta mater. 49 (2001), 1035-1040. [5] A. Donev and S. T orquato, Energy-efficient actu ation in infinite lattice stru ctures, J. Mec h Ph ys. Solids, 51 (2003) 1459-1475. [6] H. Gluc k, A lmost all simply connected closed surfaces are rigid, in Geometric T op ology , Lectu re Notes in Math., no. 438, S p ringer-V erlag, Berlin, 1975, pp. 225-239. [7] X-S Gao, C-C Zhu, S-C Chou, J-X Ge, Aut omated generation of Kemp e link ages for algebraic curv es and surfaces, Mec hanism and Machine Th., 36 (2001), 1019-1033 . [8] J. Gra ver, B. Serv atius and H. S erv atius, Com binatorial rigi dity, Graduate T exts in Mathematics, vol 2, Amer. Math. Soc., 1993. [9] S. D. Guest and J. W. Hu tchinson, On th e determinacy of rep etitive stru ctures, Journal of the Mec hanics and Physics of S olids 51 (2003) 383391. [10] Grunbaum, B., Shep hard, G.C., Tilings and patterns. W.H. F reeman, New Y ork, 1987. [11] C. Jermann, B. N eveu and G. T rombettoni, A new structural rigidity for geometric constraint systems, Proceedings of the F ourth International W orkshop on Automated Deduction in Geometry , Septem b er, 2002, Springer Lecture Notes in A rtificial Intellig ence, v ol 2930, 2004. [12] A. B. Kempe, O n a general metho d of describing plane curves of the nth d egree by linkwork, Pro c. London Math. So c., 7 (1876) 213 -216. [13] G. Laman, On graphs and th e rigidit y of plane skel etal structu res, J. Engineering Mathematics, 4 (1970), 331-340. [14] J.C. Ow en, Constraints on simple geometry in tw o and three dimensions. Geometric constraints: theory and practice (T emp e, A Z, 1993). In ternat. J. Comput. Geom. Appl. 6 (1996) 421–434. [15] J.C. Ow en an d S .C. P ow er, The non- solv abilit y by radicals of generic 3-connected planar Laman graphs, T rans. Amer. Math. So c., 359 (2007 ), 2269 -2303. [16] G. A. R. Pa rke and C. M. How ard (Editors), Space Structures 4, volumes 1 and 2: Proceedings of th e F ourth International Conference On Sp aces Structures, Guilford, UK, 5-10 S eptember 1993, Published by Thomas T elford, 1993. [17] B. R oth, Rigid and flexible fr ameworks , American Math. Monthly , 1981. [18] W. Rudin, F unctional Analysis, McG raw and Hill, NY, 1991. [19] T reacy , M.M.J, Rivin, I, Balko vsky , E, Rand all, K.H., F oster, M.D., Enumeration of p erio dic tetrahedral framew orks. I I. P olynod al graphs, Microp orous and Mesoporous Materi als, 74 (2004), 121-132. [20] W. Whiteley , in Matroid A p plications ed. N. White, Encyclod edia of Mathematics and its applicatio ns 40 (1992), 1-51.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment