Voronoi cells of discrete point sets
It is well known that all cells of the Voronoi diagram of a Delaunay set are polytopes. For a finite point set, all these cells are still polyhedra. So the question arises, if this observation holds for all discrete point sets: Are always all Voronoi…
Authors: Ina Voigt
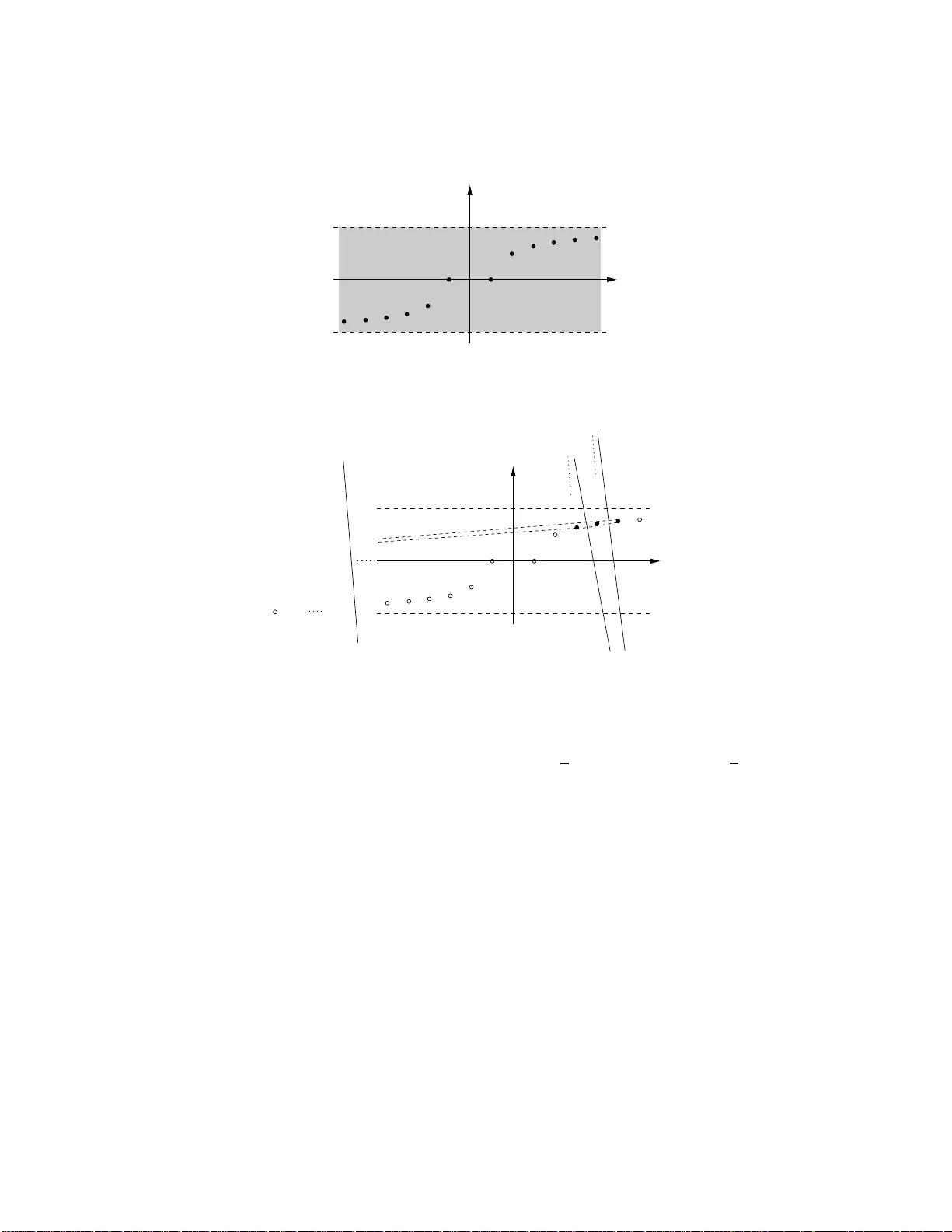
V OR ONOI CELLS OF DISCRETE POINT SETS INA VOIG T Abstract. It is w ell kno wn that all c ells of the V oronoi diagram of a Delauna y set are p olytopes. F or a finite poi n t set, all these cells are stil l polyhedra. So the question arises, if this observ ation holds for all discr ete p oi n t s ets: Are alwa ys all V oronoi cells of an arbi trary , infinite discrete point set p olyhedral? In this paper, an answer to this question will b e given. It will b e shown that all V oronoi cells of a discrete point set ar e polytop es i f and only if every p oin t of the point set is an inner p oin t. F urthermore, the term of a lo cally finitely generated discrete poi n t set will be in troduced and it will be sho wn that exactly these sets ha v e the prop ert y of p oss essi ng only p olyhedral V oronoi cells. 1. Introduction A r eview of the literature on V orono i cells reveals the fact that they e mer ge in many different fields of resea r c h and a re k no wn under ma n y different names like ne ar est neighb or r e gion , Wigner-Seitz c el l or Thiessen p olygon . In all these fields, the r esearch a ctivities o n V oronoi diagrams were v ery viv id during the last decades. A compr ehensive ov erview is given e.g. in [1 ] or [7], wher e a great part o f the literature ab out V oro noi cells is cited. Thereby one notices that in a ll applications, the r e la ted discre te point sets are either finite or posses s a certain ”str ucture”. The litera ture on co mputational geo metry (see e.g . [4] for a n ov erview) is mainly concerned with the algorithmic construction of V orono i diagr ams. Hence, it is normally ass umed that the set o f considered p oint sites is finite. On the other hand, if V oronoi diagrams o f infinite point sets are observed, the examined set of p oints is always as sumed to e x hibit some s ort of structure. In v a rious fields of natural and so cial sciences one is interested in the so called Poisson V or onoi diagr am (cf. Chapter 5 of [7]), where the considered point set is a r ealization o f a non-empty s tationary p oint pro cess and is us ually assumed to b e disc r ete and in gener al quadr atic p osition , which means that in m -dimensional Euclidean s pa ce no k + 1 p oints lie on a ( k − 1)-dimensional hyperpla ne for k = 2 , . . . , m and that no m + 2 p oints lie on the b oundary of a sphere. In cr ystallogra ph y (see e.g. [2]), the co nsidered p oint sets are genera lly assumed to b e Delaunay sets (to b e defined in Sec tio n 2). It is well known that in all these cases all V orono i cells are either po lytopal or polyhedra l. But what happens if we consider an arbitr ary infinite discrete p oint s et? Are ther e still all V oronoi cells p olyhedra or even p olytop es? In this pape r we will show that this is not the ca se. W e w ill g iv e a n example of an infinite discrete p oin t s e t whose V oronoi diagr am contains a non- polyhedr al cell, cf. Example 2 .1. But o bviously , there ex is t discrete p oint sets for which a ll Date : No ve mber 10, 2008. 1991 Mathematics Subject Classific ation. 51M20, 52A20, 52C22. Key wor ds and phr ases. V oronoi cells, infinite discrete p oin t set, dir ection cone, lo cally finitely generated. 1 2 Ina V oigt V oronoi cells are p olyhedral. Th us, the aim is to characterize the discr e te p oin t sets that p osses s only p olyhedral or r a ther p olytopal V oronoi ce lls . By partitioning the discrete point set in inner p oints and b oundary p oints rela tiv e to its conv ex hull (cf. Definition 3.1) and intro ducing the ter m of the dir e ction c one of a po in t of a dis c rete po in t set (cf. Definition 4 .1), we can formulate the desir ed characteriza tions: In Theorem 3.1 we show that the V orono i cell of a p oint p is a po lytope if and only if p is an inner point of the discre te p oint s et. Theorems 4 .1 a nd 4.2 prove that the V oronoi cell of a b oundary p oint is p olyhedral if and o nly if the corres ponding direction cone is finitely g enerated. Let us ca ll such discrete point sets whose en tire direction cones ar e finitely genera ted lo c al ly fin itely gener ate d (cf. Definition 4.2). Then it is p ossible to prov e the following sta temen t (cf. Theorem 4.3): Al l V or onoi c el ls of a discr ete p oint set P ar e p olyhe dr al if and only if P is lo c al ly finitely gener ate d . This pap er whic h is a par t o f a P h.D. thesis [8 ] is o rganized as fo llo ws: In Section 2 we provide so me well known definitions and facts fro m convex geometry , which will be a pplied b elo w. W e a lso present an exa mple of a no n-po ly hedral V oronoi cell of an infinite dis crete p o in t set. In Section 3 we star t our analysis of the shap e of the V oronoi cells . W e introduce the terms of inner p oints and b oundary p oints of a discrete p oint set and prove that the V oronoi diag ram con tains only p olytopa l cells if and only if all p oints of the discrete point set are inner p oin ts. Subsequently , we inv estigate the b ehavior of the V oro no i cells of b oundary p oints in Section 4 . W e define the dir e ction c one of a p oint of a discrete p oin t se t and show that the V or onoi ce ll of a boundary p oint is poly hedral if and only if its direction cone is finitely gener a ted. Overall, this yields our desired characterization. Section 5 provides a short conclusion. 2. Basic Principles and Settings Let E n be the E uclidean space of dimension n and denote the Euclidean nor m by k . k a nd the s tandard s calar pro duct by h ., . i . W e define the interior of a set M ⊂ E n by M ◦ := S A ⊂ M ,A op en A . The closur e of M is given by M := T A ⊃ M ,A cl osed A . By defining the c omplement of M as M c := E n r M , we get the b oundary of M as ∂ M := M ∩ M c . F ur thermore, the affine hul l o f M is deno ted by aff ( M ) := T A ⊃ M ,A affine A , whereat a set M ⊂ E n is called affine if λx + (1 − λ ) y ∈ M for all x, y ∈ M a nd λ ∈ R . W e call a p oint set P ⊂ E n discr ete if it has o nly finitely many p oints in any b ounded set of E n . F or each p oint p of a discrete p oint set P ⊂ E n , we can define the V or onoi c el l V ( p ) o f p relative to P as V ( p ) := { x ∈ E n | k x − p k ≤ k x − q k for all q ∈ P } . The a sso ciated tessellation of E n by all V oro noi cells o f the set P is called the V or onoi diagr am of P . Each cell V ( p ) ist the ne ar est neighb or r e gion of p in E n . An equiv alent des cription of V ( p ) is the repre sen tation of V ( p ) as intersection o f closed ha lf s paces, V ( p ) = \ q ∈P r { p } H − p ( q ) , where the half spaces H − p ( q ) are defined as H − p ( q ) := H − ( q − p, 1 2 k q − p k 2 ) + p with H − ( y , 1 2 k y k 2 ) := { x ∈ E n | h x, y i ≤ 1 2 k y k 2 } . T hus, the hyperplane Hyp p ( q ) that bo unds the half spac e H − p ( q ) is o rthogonal to the vector q − p dividing the s e g men t V oronoi cells of discrete p oint sets 3 a Figure 1. E xample 2 .1, non-p olyhedra l V oro noi cell [ p, q ] int o equal parts. Obviously , we do no t always need all the half spa c es H − p ( q ) to represent V ( p ) as an intersection. Therefore, we ca ll a p oint p ′ ∈ P (and a half space H − p ( p ′ ), r espectively) V or onoi r elevant for p if V ( p ) ( T q ∈P r { p,p ′ } H − p ( q ). As V ( p ) ca n b e describ ed a s an intersection of closed conv ex s ets, the V oro noi cell itself is closed and c on vex. Thereby , we call a set K ⊂ E n c onvex , if (1 − λ ) x + λy ∈ K for all x, y ∈ K and 0 ≤ λ ≤ 1 . If a conv ex set K ⊂ E n can b e repr esen ted as the intersection of finitely many clo sed half spaces , it is called a p olyhe dr on , a nd a bo unded p olyhedron is ca lle d a p olytop e . Hence, all V or onoi cells of a finite p oint set ar e p olyhedra. A p oint set P ⊂ E n is called a D elaunay set (or ( r , R )- system ), if there exist scalars R > r > 0 such that eac h ball o f radius r contains at most one p oint of P , and every ball of radius R contains at leas t one p oint of P . E ngel sho wed in Sec tio n 2 of [5 ] that each V o r onoi cell of a Dela una y s et is a p olytop e, and in particular, it is a p olyhedro n. If a close d conv ex set K ⊂ E n has the pro perty that each intersection of K with a p olytop e is again a po lytope, we call K a gener alize d p olyh e dr on . It is alrea dy known (cf. Chapter 32 of [6]) that all V or onoi cells of an a rbitrary discr ete p oint set are gener a lized p olyhedra. Noteworth y , an arbitrar y genera lized p olyhedron is not a lw ays p olyhedra l, as we will see in the following example, wher e a discrete po in t set p ossessing a non-p olyhedral V or o noi ce ll is given: Example 2.1. W e set P 1 := { (0 , z ) | z ∈ Z } ∪ { (1 , 0) } and denote a := (1 , 0). Then it is obvious tha t all half s pa ces H − a ( q ) , q ∈ P 1 r { a } a nd th us all p oint s q ∈ P 1 r { a } are V o ronoi relev ant for a . Th us V ( a ) is no t p olyhedral, cf. Figure 1. W e now wan t to characterize the discr ete p oint sets, for which a ll V oronoi cells are e ither p olytop es or polyhedr a. F or this task, we will need some w ell known definitions and facts from co n vex geometry which we will co mpile in the following. F or the pro ofs, we refer to the literature o n conv ex geometry like [3] and [6 ]. F or any set M ⊂ E n we can construc t the c onvex hul l conv( M ) as the se t, which consists of all co n vex combinations of po in ts of M that is conv( M ) := n k X i =1 λ i x i | x i ∈ M , λ i ≥ 0 , k X i =1 λ i = 1 , k ∈ N o . 4 Ina V oigt F urther more, by Cara th ´ eodor y ’s Theorem we know that each point x o f conv( M ) can be represented as a conv ex combination of at most n + 1 p o in ts of M (cf. Theorem I.2.3 in [3]). Theorem 2. 1. (Car ath´ eo dory) F or M ⊂ E n and x ∈ conv( M ) ther e exist a 1 , . . . , a k ∈ M such t hat x = P k i =1 λ i a i with λ 1 , . . . , λ k ≥ 0 , P k i =1 λ i = 1 and k ≤ n + 1 . A similar statemen t holds for interior p oin ts of the conv ex hull; S teinitz show ed (cf. Problem No. 3 to I.2.3 in [3]): Theorem 2.2. (Steinitz ) F or M ⊂ E n and x ∈ conv( M ) ◦ ther e ex ist s a su bset M ′ ⊂ M with | M ′ | ≤ 2 n such that x ∈ conv( M ′ ) ◦ . Beside the conv ex hull, we can also construct a c onic hul l of any giv en set M ⊂ E n , cone M := n k X i =1 λ i x i | x i ∈ M , λ i ≥ 0 , k ∈ N o , which is a co n vex cone with a pex 0. In o rder to c harac ter ize co n vex sets, it is somehow conv enient to lo ok for the greatest cone which is contained in the cons idered conv ex set. Therefor we define the r e c ession c one (also ca lled char acteristic c one ) of a conv ex set K ⊂ E n as C c ( K ) := { x ∈ E n | x + y ∈ K for all y ∈ K } . F or each conv ex set K , its re cession cone C c ( K ) is either a conv ex co ne with ap ex 0 or equa ls { 0 } . In the sp ecial case that the c o n vex set K is a p olyhedro n, K = P = T k i =1 { x ∈ E n | h x, y i i ≥ α i } , we get C c ( P ) = T k i =1 { x ∈ E n | h x, y i i ≥ 0 } . F urther inv estigatio n of co n vex sets dea l with the determination of extreme po in ts and rays. F or a c on vex set K ⊂ E n , we call x ∈ K an extr eme p oint of K if there exists no non-trivial conv ex combination x = (1 − λ ) x 1 + λx 2 with po ints x 1 , x 2 ∈ K and 0 < λ < 1. The set of a ll ex treme po in ts of K is denoted by Ext( K ). By a theorem of Krein a nd Milman , we know that ea c h closed, bo unded c o n vex set is uniquely deter mined by its extreme p oints (cf. Theore m I I I.4.1 in [3]). Theorem 2.3. (Kr ei n-Milman) If K ⊂ E n is a close d, b ounde d c onvex set, then K = con v(Ext( K )) . It is obvious that the determination o f Ext( K ) is no long e r sufficient, if K is un b ounded. In this ca s e, we hav e to co mprise rays that b elong to K . Thereby , a r ay with initial p oint x 0 and dir e ction v is defined a s S ( x 0 , v ) := { x ∈ E n | x = x 0 + λv , λ ≥ 0 } . W e call a ray S ( x 0 , v ) ⊂ K of a c on vex set K an extr eme r ay of K , if x 0 is an extreme p oint of K and K r S ( x 0 , v ) is still conv ex. The set o f all extreme rays of K is denoted by RExt( K ). Klee prov ed that ea c h line-free, close d convex set is generated by its extreme p oints and e xtreme rays (cf. Lemma I I.16.3 in [3]). Theorem 2. 4. (Kle e) Each close d c onvex set K ⊂ E n that c ontains no line fulfil ls K = con v(Ext( K ) ∪ RExt( K )) . Using this result, one can show that each closed conv ex set has a decompo sition as Minkowski sum of a n affine subspace together with a convex cone and a compact conv ex set. V oronoi cells of discrete p oint sets 5 Another appro ach to describ e a conv ex set K ⊂ E n utilizes the hyper planes whic h are tangential to K . Ther efore, we call a hyp e rplane Hyp supp orting hyp erplane to K if K is completely c o n tained in one of the half space s bo unded by Hyp and Hyp ∩ K 6 = ∅ . The intersection F := H yp ∩ K is called a fac e of K if Hyp is a suppo rting hyperpla ne of K . It can b e shown that it is p ossible to find fo r e very conv ex se t K ⊂ E n a dual conv ex set such that the inclusion-chains of the faces ar e r ev ersed. One realiz ation of such a dual set is the p olar set K ∗ , which we define a s K ∗ := { y ∈ E n | h x, y i ≤ 1 for all x ∈ K } . W e subsume the most imp ortant prop erties of p olar sets (cf. Chapter IV, Section 1 in [3]): Theorem 2.5. L et K ⊂ E n b e a c onvex set. 1. If K is c omp act and the origin 0 ∈ K ◦ is an interior p oint, the same holds for K ∗ , and we have K ∗∗ = K . 2. K is b ounde d if and only if 0 ∈ ( K ∗ ) ◦ . 3. F or al l c onvex sets K 1 ⊂ K 2 ⊂ E n , it holds K ∗ 2 ⊂ K ∗ 1 . 4. If K = conv( y 1 , . . . , y k ) is a p olytop e, with y 1 , . . . , y k ∈ E n , we get K ∗ = { x ∈ E n | h x, y i i ≤ 1 for i = 1 , . . . , k } . If C ⊂ E n is a conv ex cone with a pex 0, the p olar cone is equal to C ∗ = { y ∈ E n | h x, y i ≤ 0 for all x ∈ C } . 3. Voronoi cells of inner points In the ab ov e Example 2.1, we observe that the co n vex hull conv( P 1 ) is not closed and that the no n-po ly hedral V or onoi cell V ( a ) b elongs to a b oundary p oint of c on v( P 1 ). W e want to compare this with the c a ses o f Delaunay s e ts , infinite discrete p oint sets in gener al qua dratic p osition a nd finite sets: If the p oin t set is a Delauna y set with par ameters ( r, R ), the existence o f the sca lar R yields that all p oints b elong to the interior of the conv ex hull o f the p oint set, whic h eq uals the whole space. And it is known that all V oronoi cells o f a Delaunay set are po lytopes (cf. Section 2 of [5]). In case of an infinite discrete p oint set in E n which is in gener al q uadratic p osition, we g e t that all subsets of n + 1 p oin ts are affinely independent. Hence its co nvex hull equa ls the whole space and each po in t is an int erior po in t. W e a lso know that all V oro noi cells a r e p olytop es (cf. Chapter 5 of [7]). If we consider a finite po in t set, we s ee that the V orono i cells of p oints that are contained in the interior of its conv ex hull are aga in p olytop es, while we only get p olyhedral cells if the corr esponding p oint lies on the b oundar y of the conv ex hu ll (cf. Proper t y V2 of Chapter 2 .3 in [7]). In lig ht o f the ab o ve, we aim to pr o ve the following theore m: F o r each (infinite) dis crete point set holds, that the V o ronoi cell of a po in t is a p olytop e if and only if the p oint b elongs to the interior o f the conv ex hull. T o simplify the notation, we wan t to in tro duce the ter ms of inner p oints and b oun dary p oints of discre te sets: Definition 3.1. Let P ⊂ E n be a discrete p oint set. W e call a p oint p ∈ P an inner p oint of P , if p ∈ conv( P ) ◦ . The set of a ll inner po in ts of P is denoted by P ◦ := P ∩ conv( P ) ◦ . A p oint p ′ ∈ P is calle d a b oundary p oint of P , if p ′ ∈ ∂ conv( P ). W e denote the s et of all b oundary p oint s b y ∂ P := P ∩ ∂ conv( P ). 6 Ina V oigt Figure 2. V oro noi cell of an inner p oint Theorem 3.1. L et P ⊂ E n b e a discr ete p oint set. Then the V or onoi c el l V ( p ) of a p oint p ∈ P is a p olytop e if and only if p ∈ P ◦ (cf. Figur e 2). Pro of. Without loss of generality , we a ssume that the p oint p ∈ P lies in the origin p = 0. (Other wise we co nsider the trans la ted p o in t set P − p = { q − p | q ∈ P } .) Now, let p ∈ P ◦ be a n inner point of the discrete p oint set. Then Steinitz’s Theorem 2.2 yields that there exist finitely many po in ts p 1 , . . . , p k in P with k ≤ 2 n such that p is an interior p oint o f conv( p 1 , . . . , p k ). Let C := conv( p 1 , . . . , p k ) ∗ be the polar set of conv( p 1 , . . . , p k ). Then by applying Theorem 2.5, w e obtain C = { x ∈ E n | h x, p i i ≤ 1 , i = 1 , . . . , k } . Since co n v( p 1 , . . . , p k ) is compact a nd p is an interior p oint of conv( p 1 , . . . , p k ), the p olar set C is c o mpact and contains p a s an int erior p oint . Setting m := max { 1 2 k p i k 2 | i = 1 , . . . , k } , we obtain T k i =1 H − p ( p i ) ⊂ m · C = { mx | x ∈ C } . As the V oro noi cell V ( p ) = T q ∈P r { p } H − p ( q ), we obviously get V ( p ) ⊂ m · C . Thus V ( p ) is contained in a p olytop e. Owing to the fact that each V o ronoi cell is a gener alized p olyhedr o n, we obta in tha t V ( p ) = V ( p ) ∩ m · C is a po lytope. T o s ho w the c o n verse, let V ( p ) = T k i =1 H − p ( p i ) b e a p olytop e. Then, Theorem 2.5 yields that V ( p ) ∗ is also a p olytop e with the origin p = 0 as an interior po in t. In addition, we know that V ( p ) ∗ is of the for m V ( p ) ∗ = conv( q 1 , . . . , q k ) for suitable q i = λ i p i , λ i > 0 for i = 1 , . . . , k . Th us it follows directly that p is an interior point of conv( p 1 , . . . , p k ) a nd in particula r 0 = p ∈ P ◦ . W e hav e just characterized the disc rete p oint sets, for which the as soc iated V or onoi dia gram con tains only poly to pal cells, as exactly those po int sets that consist only of inner po in ts. F urthermore , as the conv ex h ull of a Delaunay set or an infinite discrete p oint set in general quadra tic p osition equa ls the who le space E n , each p oint of these sets is an inner p oint, and we ge t as a specia l case of Theorem 3.1 that all V oronoi cells ar e p olytop es. Corollary 3.1. L et P ⊂ E n b e a discr et e p oint set. The n it holds: (1) A l l V or onoi c el ls of P ar e p olytop es if and only if P = P ◦ . (2) If conv( P ) = E n , then al l V or onoi c el ls of P ar e p olytop es. (3) If the V or onoi c el l V ( p ) of a p oint p ∈ P is non-p olyhe dr al, then p b elongs to ∂ P . Int eresting ly , for a discrete p oint set P the prop erty P = P ◦ is not equiv alent to conv( P ) = E n . This can b e illustrated by the following e x ample: V oronoi cells of discrete p oint sets 7 Figure 3. E xample 3.1, conv ex hull p q q 1 2 q 3 Hyp (q ) 3 p Hyp (q ) p 1 2 Hyp (q ) p Figure 4. E xample 3 .1, V o ronoi cell construction Example 3. 1. Consider the p o in t set P 2 := { ( n, 1 − 1 n ) | n ∈ N } ∪ { ( − n, − 1 + 1 n ) | n ∈ N } ⊂ E 2 , where each p oint of P 2 is an inner po in t, cf. Figure 3. It follows from Corollar y 3.1 that all V or onoi cells are p olytop es, but the co n vex hull of P 2 do es not equal E 2 . If we now want to sk etch the V oronoi dia g ram of the set P 2 of Exa mple 3 .1 in order to see all the p olytopal V o ronoi cells, we re cognize that the cells exhibit a very ”s trange” shap e. That is, they are very long and thin, and it is hard to belie v e that all of them a re p olytop es. Figure 4 illustrates that this is nevertheless true. Let us choo se an arbitra ry p oint p := ( x, y ) ∈ P 2 , without loss of g e nerality x, y > 0. T o constr uct the V oronoi cell V ( p ), w e first consider the hyperpla nes Hyp p ( q 1 ) , Hyp p ( q 2 ) corres ponding to the t wo close s t p oints q 1 , q 2 ∈ P 2 to p . Since these hyperplanes ar e no t parallel, they intersect in a po int ( x 1 , − y 1 ) with y 1 ≫ 0. F urther more, w e find a nother point q 3 ∈ P 2 far aw ay from p whos e cor resp onding hyperplane Hyp p ( q 3 ) intersects Hyp p ( q 1 ) , Hyp p ( q 2 ) in p oints ( x 2 , y 2 ) , ( x 3 , y 3 ) with y 2 , y 3 ≫ 0. Therefore, the V oronoi cell V ( p ) is bounded. Hence, we hav e also geometrically confir med that the V oronoi cells of P 2 are indee d p olytop es. 8 Ina V oigt 4. Voronoi cells of boundar y points T o c onstruct the V oro noi cell V ( p ) of a p oint p of a discrete p oint set P , w e hav e to cons ider the half spaces, whic h a re defined b y the directions q − p for q ∈ P r { p } . It is therefor e conv enient to in vestigate the cone whic h is gener ated by the direc tions emanating from p . W e wan t to call this c o ne the dir e ction c one of p . Definition 4.1. Let P ⊂ E n be discrete and p ∈ P . Then we define the dir e ction c one of p b y C ( p ) := co ne( P − p ) = n m X i =1 λ i ( p i − p ) | p i ∈ P , λ i ≥ 0 , m ∈ N o . One ea s ily der iv es that the dir ection cone C ( p ) of a p oint p is either a conv ex cone with ap ex 0 o r the whole s pa ce E n . More precisely , it is p ossible to prove that the co nic hull C ( p ) of a p oin t p eq ua ls the whole space E n if and only if p is an inner p oint . It is also clea r that, for p ∈ ∂ P , the directions which define C ( p ) are per pendicular to the hyper pla nes o f the half s paces which define the V or onoi cell V ( p ). Thus, there is some kind of ”duality” betw een C ( p ) a nd V ( p ). T o s pecify this duality , we will pr ov e that the recessio n cone o f a p olyhedra l V orono i cell V ( p ) of a b oundary point p ∈ ∂ P equals the pola r cone of the dir ection cone C ( p ), that is, C ( p ) ∗ = C c ( V ( p )). This yields the following relation: If the V oro noi cell of p is finitely g enerated (i.e. if V ( p ) is p olyhedra l), then the sa me holds for the direction cone C ( p ). Theorem 4. 1. L et P ⊂ E n b e a discr ete p oint set and p ∈ ∂ P a b oun dary p oint. Then C ( p ) is finitely gener ate d, if V ( p ) is p olyhe dr al. Pro of. As V ( p ) is p olyhedral, there exist finitely many p oint s p 1 , . . . , p k in P such that V ( p ) = \ q ∈P r { p } H − p ( q ) = k \ i =1 H − p ( p i ) = k \ i =1 H − ( p i − p, 1 2 k p i − p k 2 ) + p. Thu s one obtains C c ( V ( p )) = k \ i =1 H − ( p i − p, 0) = \ q ∈P r { p } H − ( q − p, 0) , and mor e over cone( p 1 − p, . . . , p k − p ) = ( T k i =1 H − ( p i − p, 0)) ∗ = ( C c ( V ( p ))) ∗ = ( T q ∈P r { p } H − ( q − p, 0)) ∗ = co ne( P − p ) = C ( p ) . Hence, it has bee n shown tha t the direction c o ne is finitely g enerated. A finitely g enerated cone is obviously closed, and hence, we can conclude that the V oronoi c ell V ( p ) of a b oundary p oint p ∈ ∂ P is non-p o lyhedral, if the direction cone C ( p ) is not closed. The V oro noi cell V ( a ) of Ex ample 2.1 provides an ex ample for this prop erty . V oronoi cells of discrete p oint sets 9 C(p) + p p s H Figure 5. P ro of of Theor em 4.2, construction Theorem 4. 2. L et P ⊂ E n b e a discr ete p oint set and p ∈ ∂ P a b oun dary p oint. Then V ( p ) is p olyhe dr al if C ( p ) is fin itely gener ate d. Pro of. As C ( p ) is finitely genera ted, we find p 1 , . . . , p k ∈ P with C ( p ) = co ne( P − p ) = cone( p 1 − p, . . . , p k − p ) . If we set H := k \ i =1 H − p ( p i ) , we obviously obtain V ( p ) ⊂ H and C c ( H ) = k \ i =1 H − ( p i − p, 0) = C ( p ) ∗ . Since p is a b oundary p oint , we hav e C ( p ) 6 = E n . Thus, C ( p ) ∗ = C c ( H ) 6 = { 0 } , so that C ( p ) is not b ounded. Note that a V oronoi r elev ant p oint must b e in C ( p ) + p and its asso ciated hyperplane must hav e a non-empty intersection with the interior of H . It is therefor e conv enient to consider the set H ∩ ( C ( p ) + p ) (cf. Figure 5). Owing to the fact that C c ( H ) ∩ C c ( C ( p ) + p ) = C ( p ) ∗ ∩ C ( p ) = { 0 } , it can easily b e see n that H ∩ ( C ( p ) + p ) is b ounded. Since H ∩ ( C ( p ) + p ) is the int ersec tio n of tw o clo sed se ts , H ∩ ( C ( p ) + p ) is as w ell clos ed and thus co mpact. Hence, it exists a maxima l distance s ′ := max {k x − p k | x ∈ ∂ ( H ∩ C ( p ) + p ) } < ∞ betw een the p oint p and the b oundary of H ∩ ( C ( p ) + p ). Since H is a p olyhedron, the num ber o f extreme p oint s | E xt( H ) | < ∞ o f H is finite. Therefor e, we ca n also define s ′′ := max {k x − p k | x ∈ Ext( H ) } < ∞ , and we set s := ma x { s ′ , s ′′ } . 10 Ina V oigt This allows us to show that all p oints, which ar e r e le v ant for p , b elong to the ball B ( p, 2 s ) := { x ∈ E n | k x − p k ≤ 2 s } . W e prov e this by contradiction: W e assume that we hav e a p oint q ∈ P ⊂ C ( p ) + p which is r elev ant fo r p , but q 6∈ B ( p, 2 s ). As the b ounding hyper plane Hyp p ( q ) of the as soc ia ted half spa ce H − p ( q ) is tangent to the ball B ( p, 1 2 k q − p k ) and 1 2 k q − p k > s , we get Hyp p ( q ) ∩ B ( p, s ) = ∅ , and th us, Hyp p ( q ) ∩ ( H ∩ ( C ( p ) + p )) = ∅ . Since E xt( H ) ⊂ ( B ( p, s ) ∩ H ) ⊂ ( H ∩ H − p ( q )) and 1 2 k q − p k > s , we get Ext( H ) ⊂ E x t( H ∩ H − p ( q )). Without lo ss of generality , w e assume that H is line-free (otherwise we restrict o ur attention to H ∩ aff ( C ( p ) + p ), which is line-free). With H ∩ H − p ( q ) ( H , Theorem 2.4 of Klee y ields the inclusion conv(Ext( H ) ∪ RExt( H ∩ H − p ( q ))) ⊆ con v(Ext( H ∩ H − p ( q )) ∪ RExt( H ∩ H − p ( q ))) = H ∩ H − p ( q ) ( H = conv(Ext( H ) ∪ RExt( H )) . Consequently RExt( H ) r RExt( H ∩ H − p ( q )) 6 = ∅ , a nd moreov er we g et C c ( H ) r C c ( H ∩ H − p ( q )) 6 = ∅ . As a result, we have C c ( H ∩ H − p ( q )) ( C c ( H ), what yields C c ( H ) ∗ ( C c ( H ∩ H − p ( q )) ∗ by Theor em 2.5. Since C c ( H ) ∗ = C ( p ) = cone( p 1 − p, . . . , p k − p ) and C c ( H ∩ H − p ( q )) ∗ = cone( p 1 − p, . . . , p k − p, q − p ) , we conclude that q 6∈ C ( p ) + p , and thus q 6∈ P ; this is a co n tradiction. Hence we have s hown that B ( p, 2 s ) co n tains a ll p oints which are relev an t for p . Since P is discr e te, we hav e |P ∩ B ( p, 2 s ) | < ∞ , so that there exist o nly finitely many re le v ant p oint s for p . Therefore , V ( p ) is a poly hedron. Since the direction cone of an inner point is ob viously finitely genera ted, w e can extend the statements of Theorem 4.1 a nd 4.2 to all points o f a discrete po in t set. W e can therefore conclude that all V orono i cells of a discrete p oin t set are po lyhedral if and only if the dire c tion cones of all p oints ar e finitely generated. T o emphasize this prop erty we wan t to call s uc h sets lo c al ly fin it ely gener ate d . Definition 4.2. Let P ⊂ E n be a discre te p oint s et. W e call P lo c al ly finitely gener ate d if the direction cones C ( p ) of all p oint s p ∈ P are finitely generated. Theorem 4.3. Al l V or onoi c el ls of a discr ete p oint set P ar e p olyhe dr al if and only if P is lo c al ly finitely gener ate d. Hence, we have a c hieved our aim and characteriz ed the discrete point sets who se V or onoi diagr am contains only p olyhedral cells. The former ly inv estigated c a ses of finite sets, Delaunay sets and infinte discr ete p oint sets in general quadr atic p osition fit in as sp ecial cases o f the ab o ve theor em. 5. Conclusion In the pas t, V oro noi diagr ams were usua lly studied for finite sets or infinite sets with a certa in structure, that is, the for merly consider ed infinite sets were either Delaunay sets or discrete p oint sets in gener al quadra tic p osition. O ne knows that in all these cases a ll V o r onoi cells are p olytop es or p olyhedra. By s tating E xample 2.1 we saw that this has not to b e true for a n ar bitrary infinite discrete p oin t set; there, the co r resp onding V or onoi diagr am co n tained a non-p olyhedr al cell. Hence, V oronoi cells of discrete p oint sets 11 we aimed to c haracter ize the discrete point sets for which all V orono i cells are p oly- top es or p olyhedra . W e investigated whic h pro perty of the discrete p oint s et yields po lyhedral or p olytopal V or onoi cells and found the desir ed characterizations, see the Theo rems 3.1 a nd 4.3. Finally , w e identified all formerly co nsidered cas es as sp ecial cases o f our theory . Ac kno wledgments. I wan t to thank Rudolf Scharlau for sup ervising my Ph.D. thesis [8] and e specia lly J ¨ urgen Eckhoff and F rank V alle n tin for many useful tips and hints reg arding the writing of this pap er. References [1] F. Aurenhammer and R. Klein, V oronoi Diagrams. In J. Sac k and G. Urrutia, editors, Handb o ok of Computational Ge ometry , Chapter V, Elsevier, Amsterdam, 2000, 201–2 90. [2] M. Baak e, A Guide to Mathematical Quasicrystals. In J.-B. Suck, M. Sc hreib er and P . H ¨ aussler, editors, Quasicrystals, A n Intr o duction to Structur e, Physic al Pr op ert ies ans Applic ations , Springer, Berlin, 2002, 17–48 . [3] A. Barvinok, A Course in Convexity , Graduate Studies in Mathematics, v ol. 54 , Amer. Math. Soc., Pr o vidence, 2002. [4] M. de Berg, O. Cheong, M. v an Kr ev eld and M. Overmars, Computational Ge ometry: Algo- rithms and Applic ations , Springer, Berlin, 2008. [5] P . Engel, Geometric Crystallography . In P . M. Gruber and J. M. Will s, editors, Handb o ok of Convex Ge ometry , v ol. B, Chapter 3.7, Els evier, Am sterdam, 1993, 989–1041. [6] P . M. Grub er, Convex a nd Discr ete Ge ometry , Grundlehren der mat hematisch en Wis- sensc haften, vol. 336 , Spr i nger, Berl in, 2007. [7] A. Ok abe, B. Bo ots, K. Sugihara and S. N. Chiu, Sp atial T essel lations, Conc epts and Appli- c ations of V or onoi Diagr ams , Wiley Series in Probability and Statistics, John Wiley & Sons, Chich ester, 2000. [8] I. K. V oigt, V oronoizellen diskr eter Punktmen gen, Ph.D. thesis, TU Dortm und University , F acult y of Mathematics, Dortmund, 2008. I. Voigt, F acul ty of Ma thema tics, TU Dor tmund University, Vogelpothsweg 87, D- 44227 Dor tmund, German y E-mail addr ess : ina.voigt@mathe matik.tu-dortmund.de
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment