Universal functions and exactly solvable chaotic systems
A universal differential equation is a nontrivial differential equation the solutions of which approximate to arbitrary accuracy any continuous function on any interval of the real line. On the other hand, there has been much interest in exactly solv…
Authors: M. A. Garcia-Nustes, Emilio Hern, ez-Garcia
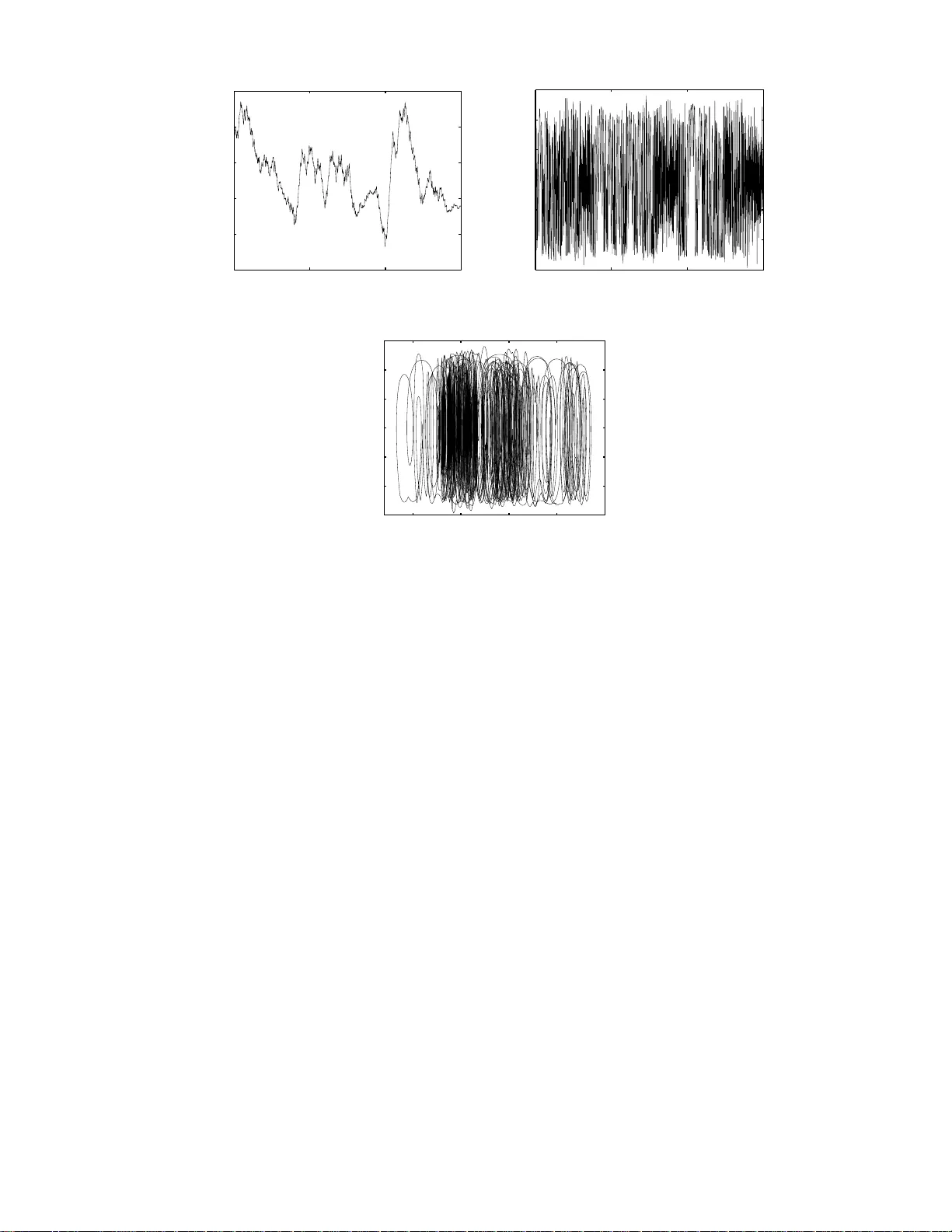
Univ ersal functions and exactly solv a ble cha otic systems M´ onica A. Garc ´ ıa- ˜ Nustes ∗ and Jorg e A. Gonz´ alez Centr o de F ´ ısic a, Instituto V enezolano de I nvestigaciones Cient ´ ıfic as, Ap artado 21827, Car ac as 1020-A, V enezuela Emilio Hern´ andez-Gar c ´ ıa Dep artament o de F ´ ısic a Inter disciplinar,Instituto Me diterrne o de Estudios Avanz ados CSIC-Universidad de las Islas Bale ar es, E-07122-Palma de Mal lor c a, Esp a˜ na A universa l differential equ ation is a nontrivial differenti al equation the sol utions of which ap- proximate to arbitrary accuracy an y contin uous function on any interv al of the real line. On the other hand, th ere has been muc h interest in exactly solv able chaotic maps. An important problem is to generalize th ese results to continuous systems. Theoretical analysis w ould allow us to p ro ve theorems about these systems and predict new phenomena. In the p resen t paper we discuss the concept of universal functions and their relev ance to th e theory of universal differential equ ations. W e p resen t a conn ection b etw een universal functions and solutions to chaotic systems. W e will sho w the statistical indep end ence b etw een X ( t ) and X ( t + τ ) (when τ is not equal to zero) and X ( t ) is a solution to some chaoti c systems. W e wil l construct universal functions that b eha ve as delta-correlated noise . W e wil l construct universa l dynamical systems with truly noisy solutions. W e will discuss physicall y realizable dyn amical systems with universal-lik e prop erties. I. INTRO DUCT ION Recently there has b een great interest in exactly solv a ble chaotic systems [1, 2, 3, 4 , 5, 6, 7]. S. Ulam and J. von Neumann were the first to prov e that the gener a l solution to the lo g istic map can b e found [1, 2]. It is very impo rtant to e xtend these res ults to contin uous systems. Theor etical ana ly sis would allow us to pr ov e theorems ab out these systems and predict ne w phenomena. Another surprising pa rallel development is that of “universal differential equations” . A universal differen tial equation is a nontrivial different ial- algebraic equation with the pro per t y that its solutions approximate to arbitrary accuracy any c o nt inuous function on any interv al of the r eal line [8, 9, 10, 11, 12, 13, 14, 15, 16]. Rub el found the first known universal differen tial equation b y showing that there are differen tial equations o f low order (e.g. fourth-order ) whic h ha ve solutions arbitra rily close to a n y prescrib e d function [8]. The existence of universal different ial equations illustr ate the amazing co mplexit y that solutio ns of lo w-or der dynamical systems can hav e. In the present pape r, we will review some development s in the ar eas of universal differential equations and exactly so lv able chaotic dynamical systems. W e will discuss the concept o f “univ ers al functions ” and their relev ance to the theo ry of universal differential equations. W e will sho w the sta tistical independence b et ween X ( t ) and X ( t + τ ) (when τ 6 = 0) a nd X ( t ) is the so lution to some chaotic dynamical systems. W e will pr esent a connection b et ween univ ersa l functions and solutions to c hao tic systems. W e will constr uct univ ersa l functions that behave as δ - correlated noise. W e will construct universal differ en tial equations with truly noisy solutio ns. W e will discuss physically realizable dynamical systems with universal prop erties and their p otential applications in secure communications and ana log computing. II. UNIVERSAL DIFFERENTIAL EQUA T IONS Rubel’s theorem [8] is: There ex is ts a nontrivial fo ur th- order differen tial equation P ( y ′ , y ′′ , y ′′′ , y ′′′′ ) = 0 , (1) where y ′ = dy dt , P is polynomia l in four v a riables, with integer co efficients, s uc h tha t for any contin uo us function φ ( t ) on ( −∞ , ∞ ) and for a n y p ositive contin uous function ε ( t ) on ( −∞ , ∞ ), there exists a C ∞ solution y ( t ) such that | y ( t ) − φ ( t ) | < ε ( t ) for all t on ( −∞ , ∞ ). A pa r ticular ex ample of Eq.(1) is the following: 3 y ′ 4 y ′′ y ′′′′ 2 − 4 y ′ 4 y ′′′ 2 y ′′′′ + 6 y ′ 3 y ′′ 2 y ′′′ y ′′′′ + 24 y ′ 2 y ′′ 4 y ′′′′ − 29 y ′ 2 y ′′ 2 y ′′′ 2 − 12 y ′ 3 y ′′ y ′′′ 3 + 12 y ′′ 7 = 0 , (2) ∗ Corresp onding author. F ax: +58-212-5041566 ; e-mai l: mogarcia@ivic.ve 2 (a) (b) FIG. 1 : Solution y ( t ) for (a) e q uation (3), and (b) equation (4) with m = 4. Duffin [10] has found t wo additional families o f universal differential equations: my ′ 2 y ′′′′ + (2 − 3 m ) y ′ y ′′ y ′′′ + 2( m − 1) y ′′ 3 = 0 (3) and m 2 y ′ 2 y ′′′′ + 3 m (1 − m ) y ′ y ′′ y ′′′ + (2 m 2 − 3 m + 1 ) y ′′ 3 = 0 (4) where m > 3. Recently , Brig gs [17] has found a new family: y ′ 2 y ′′′′ − 3 y ′ y ′′ y ′′′ + 2(1 − n − 2 ) y ′′ 3 = 0 , (5) for n > 3. The s olutions a r e C n . W e w ould lik e to make some o bserv a tions ab out these equations. Rubel’s function y ( t ) in E q.(2) is C ∞ but not rea l-analytic, typically having a co un table num b er of es sent ial singularities. The functions used to reco nstruct the so lutions to Eq.(2) a re of the form y = Af ( αt + β ) + B , (6) where f ( t ) = R g ( t ) dt , g ( t ) = exp h − 1 (1 − t 2 ) i for − 1 < t < 1, with g ( t ) = 0 for all other t . The s olutions to equations (3) are trig onometric splines. The kernel g ( t ) is defined as g ( t ) = a [cos bt + c ] m . (7) On the other hand, the k ernel emplo yed to obtain the solutions to Eq. (4) are p olynomial splines: g ( t ) = a [1 − ( bt + c ) 2 ] m . (8) The s olutions a r e very unstable. This phenomenon can b e o bserved in Fig.(1a) a nd Fig.(1 b). II I. EXACTL Y SOL V ABLE CHAOTIC MAPS Ulam a nd von Neumann [1, 2] pr ov ed tha t the function X n = sin 2 ( θπ 2 n ) is the general solution to the logistic map X n +1 = 4 X n (1 − X n ) . (9) Recently , many pap er s hav e b een dedicated to exactly solv able chaotic maps [3, 4, 5, 6, 7, 1 8, 19, 20, 21]. In some of these pap ers, the author s not only find the explicit functions X n that solve the maps, but a ls o they discuss 3 the s tatistical pro per ties of the sequence s generated by the chaotic maps. F or many of the maps discussed in the men tioned pap ers, the exact solution can be written a s X n = P ( θk n ) , (10) where P ( t ) is a perio dic function, θ is a fix ed r eal parameter and k is an integer. F or instance, X n = co s(2 π θ 3 n ) is the so lution to map X n +1 = X n (4 X n 2 − 3). This is a particula r case of the Chebyshev maps [5]. V ery in teresting c haotic maps of type X n +1 = f ( X n ) can be constructed when function P ( t ) is a combination of trigonometric , e lliptic and other gener alized p erio dic functions [6]. IV. ST A TISTICAL INDEPENDENCE W e will consider statis tica l indep endence in the sense o f M. Kac [22, 23, 24, 25]. In this fra mew or k, t wo functions f 1 ( t ) , f 2 ( t ) are indepe ndent if the prop ortion of time during which, simultaneously , f 1 ( t ) < α 1 and f 2 ( t ) < α 2 is e qual to the pro duct o f the prop ortions of time during whic h separately f 1 ( t ) < α 1 , f 2 ( t ) < α 2 . First, w e will present some r esults ab out functions of natural arg umen t n . Consider a genera liz ation to the functions that are exac t solutions to the Cheb yshev maps: X n = cos(2 π θ Z n ) , (11) where Z is a generic real num b er. An y set of subsequences X s , X s +1 , · · · , X s + r (for any r ) c o nstitutes a s et o f statistically indep e nden t random v ar ia bles. If E ( X ) is the exp ected v a lue o f quantit y X , let us define the r - o rder cor r elations [18]: E ( X n 1 X n 2 · · · X n r ) = 1 Z − 1 dX 0 [ ρ ( X 0 ) X n 1 X n 2 · · · X n r ] . (12) Here E ( X n ) = 0 , − 1 6 X n 6 1, ρ ( X ) = 1 π √ 1 − X 2 , X 0 = cos(2 π θ ). In Ref. [27] it is shown that E ( X n 0 s X n 1 s +1 · · · X n r s + r ) = E ( X n 0 s ) E ( X n 1 s +1 ) · · · E ( X n r s + r ) (13) for a ll pos itiv e int ege r s n 0 , n 1 , n 2 , · · · , n r . The results abo ut the indep endence of subseque nc e s of function X n = cos(2 π θ Z n ) can be extended to more ge neral functions a s the following: X n = P ( θ T Z n ) , (14) where P ( t ) is a perio dic function, T is the p erio d of P ( t ) and θ is a parameter [27]. M. Kac [22, 23, 24, 25] has s tudied indep endence of differ en t contin uous functions, e.g. f 1 ( t ) = c os ( t ) , f 2 ( t ) = cos ( √ 2 t ). How ever, these functions are perio dic [22, 23, 24, 25, 26]. W e are interested in the indep endence of contin uous functions in the sense that the s ame function can pro duce statistically indep enden t random v ar iables if ev aluated at different times. That is, the functions f ( t ) and f ( t + τ ) should b e statistically indep endent if τ 6 = 0. Periodic functions will nev er poss ess this proper t y . Using the theor ems of Refs. [22, 25], we obtain the result that functions f 1 = cos( λ 1 t ) , f 2 = cos( λ 2 t ) , · · · , f r = cos( λ r t ) constitute a set of independent functions when the num b ers λ 1 , λ 2 , · · · , λ r are linear ly indep endent ov er the rationals. This is equiv a len t to the fa ct that if α 1 , α 2 , · · · , α r are ra tio nal, α 1 λ 1 + α 2 λ 2 + · · · + α r λ r = 0 o nly if α 1 , α 2 , · · · , α r are all zero. Consider the following contin uo us function constructed as a contin uous analogous to the function (11): X ( t ) = cos ( θ e bt ) . (15) It is not difficult to s ee that the functions X ( t ) and Y ( t ) = X ( t + τ ) are indep endent (in M. Kac’s s ense) for (Lebe s gue) a lmost all τ > 0. Note that Y ( s ) = c os λs, X ( s ) = cos s , where s = θ e bt , λ = e bτ . The pro of of the fact that Y ( s ) = co s( λs ) and X ( s ) = cos s are indep endent is tr ivial based on the theorems of M. Kac[22, 2 3, 24, 25]. 4 V. ALGEBRAIC DIFFERENTIAL EQUA TIONS AND CHAOTIC SOLUTIONS There ex is ts a nontrivial fo ur th- order differen tial equations of t yp e: P ( y ′ , y ′′ , y ′′′ , y ′′′′ ) = 0 , (16) where P is a p o lynomial in four v ar iables, w ith int eger co efficients, such tha t there exist solutions y ( t ) with the prop erty that y ( t ) and y ( t + τ ) are sta tistically indep endent functions for mo st τ . A par ticular example of Eq .(1 6) is the following: 2 y ′ y ′′ − 3 y ′ y ′′′ + y ′ y ′′′′ − y ′′ y ′′′ + ( y ′′ ) 2 = 0 . (17) The function y ( t ) = cos ( e t ) is a s olution to this equatio n. Here we should make a remark. The differential equations (2), (3), (4 ), (5), a nd (17) a re similar in the sense that they a re all of the t yp e (1) or (16), and that all the terms are nonlinear . W e hav e shown that the equation (1 7) p ossesses en tire solutio ns as the fo llowing y ( t ) = co s( e t ) which ha s the prop erty that y ( t ) and y ( t + τ ) are not corr elated. This so lution is rea l-analytic on ( −∞ , ∞ ). This result shows that equations of t yp e (16) can generate hig h complexity . VI. UNIVERSAL FUNCT IONS In this sectio n we will follow the appro ach to universal equations develop ed by R. C. Buck [9] and M. Boshernitzan [13]. In this pap er, a family o f functions will b e ca lled universal if these functions ar e dense in the spac e C [ I ] of all cont inuous real functions o n the in terv al I ⊂ R . R. C. Buc k has obtained universal par tial algebraic differ e n tial equations using a very deep metho d: Kolmo gorov’s solution of Hilber t’s Thirteen Problem. He has found that solutions to a smo oth PDE can b e dense in C [ I ][9]. The adv antage of this approa ch is that we ca n c o nstruct universal functions which a re real- analytic on R = ( −∞ , ∞ ). Thu s, the cor resp onding universal equations will hav e so lutio ns that are r e a l- analytic on R = ( −∞ , ∞ ). F or an y interv al I ⊂ R = ( −∞ , ∞ ), C [ I ] denotes the Banach space of re a l- v alued cont inuous bo unded functions on I . Boshernitzan [1 3] has studied the following families of functions: y ( t ) = t + a Z 0 bd 1 + d 2 − cos( bs ) cos( e s ) ds + c, (18) where d > 0, a , b , and c are r eal par a meters. Another imp ortant family of functions is defined as follows: y ( t ) = b n t + a Z 0 cos 2 n 2 ( bs ) cos( e s ) ds + c, (19) where a , b , c are pa r ameters and n ≥ 1 is an in teger constant. W e should stress that a ll the functions in the family given by E q.(19) ar e r eal-analytic on R = ( −∞ , ∞ ) and ent ire. Boshernitzan has pr oved that each of the families o f functions, (18) and (19), is dense in C [ I ], for a ny compact int erv al I = [ a, b ] ⊂ R . So these functions a re univ ersal. Hence it is pos sible to construct universal systems using these universal families of functions. Other re sults o f Boshernitzan ar e the following. There exists a nontrivial six th- order alge br aic differential equa tion of the form P ( y ′ , y ′′ , · · · , y (6) ) = 0 , (20) such that any functions in the family (18) is a solution. And there exis ts a nontrivial seven th- or der algebraic differen tial equation o f the form P ( y ′ , y ′′ , · · · , y (7) ) = 0 , (21) 5 0 10 30 50 −2 −1 0 1 2 t y(t) FIG. 2 : Time- series generated by (19). such tha t any function in the family (19) is a solution. F rom these theor e ms one can obtain an imp ortant results for us: There exists a nontrivial seven th- orde r differential equation, the r eal- analytic e ntire solutions of which are dense in C [ I ], for any compact interv al I ⊂ R . Thus this equation is universal. Boshernitza n has not constructed this equation explicitly . The p os sibilit y of an en tire approximation for any dynamics is v ery promising for practical a pplications. VII. UNIVERSAL SYSTEMS OF DIFF ERENTIAL EQUA TIONS Using the inverse problem tec hniques and theorems of the w orks[8, 9, 10, 11, 1 2, 13, 14, 15, 16], and the results contained in the pr esent pap er, it is p ossible to write down a system of differen tial equations suc h that a n y function of the family (19 ) is a solution: P 1 [ x, x ′ , · · · , x ′′′ ] = 0 , (22) P 2 [ y , y ′ , · · · , y ′′′ ] = 0 , (23) z ′ = A x y . (24) Eq. (2 2) is constructed in such a w ay that a ll the functions x = a [cos( bx + c )] m are so lutions. The sp ecific p olyno mial P 1 is P 1 = mx ′′′ x 2 − (3 m − 2) x ′′ x ′ x + (2 m − 2) x ′ 3 , (25) where m = 2 n 2 > 2. Eq.(23) is constructed in such a w ay tha t y ( t ) = cos( e t ) is a s olution. The sp ecific p olynomial P 2 is defined as P 2 = y y ′′′ − 3 y y ′′ − y ′ y ′′ + y ′ 2 + 2 y ′ y . (26) The vector solution ( x, y , z ) to the system of equa tions (22-24) is such that for the v a r iable z ( t ) the functions (1 9) are solutions. Thu s, the system of differential eq uations (22-2 4) can gene r ate, in v ariable z ( t ), universal functions. Note tha t this is a seven th- o rder dynamical system as w as predicted by Bos he r nitzan[13]. The s ystem of equations (22- 2 4) is present ed in this paper for the first time. VII I. NOISY FUNCTIONS In this section we use several concepts and results from proba bilit y theory a nd mathematical statistics which can be consulted for instanc e in the bo o ks[28, 29]. In sections (IV) and (V) we discus s ed the function y ( t ) = cos( e t ). Note that the statistical independence b etw een functions y 1 ( t ) = co s( e t ) a nd y 2 ( t ) = co s( e t + τ ) implies the following rela tionship: E [ y k 1 1 ( t ) y k 2 2 ( t )] = E [ y k 1 1 ( t )] E [ y k 2 2 ( t )] , (27) 6 for a ll pos itiv e int ege r s k 1 and k 2 . Here E [ x ( t )] is the exp ected v a lue of quantit y x ( t ). It can b e calculated a s follows: E [ x ( t )] = lim T →∞ 1 T T Z 0 x ( t ) dt. (28) As E [ y 1 ( t )] = 0, w e obtain that E [ y ( t ) y ( t ′ )] = 0 , (29) for t 6 = t ′ . In fac t, a direct calcula tio n of the auto cor relation function c o nfirms this results: C ( τ ) = lim T →∞ 1 T T Z 0 cos( e t ) cos( e t + τ ) dt = 0 (30) for τ 6 = 0. Another imp ortant sta tistical prop erty of the indep endent functions y 1 ( t ) and y 2 ( t ) is η ( y 1 ( t ) , y 2 ( t )) = η ( y 1 ( t )) η ( y 2 ( t )) , (31) where η ( y ) is the probabilit y density . In fac t, η ( y 1 ) = 1 π p 1 − y 2 1 , (32) η ( y 2 ) = 1 π p 1 − y 2 2 , (33) η ( y 1 , y 2 ) = 1 π 2 p (1 − y 2 1 )(1 − y 2 2 ) . (34) Fig.(3) sho ws these prop erties. Let us in tro duce a g e neralized function y ( t ) = cos( φ ( t )) . (35) W e sho uld re mark here that the arg umen t of function (35), φ ( t ), do es no t need to b e exp onential all the time for t → ∞ , in o rder to g enerate no isy dynamics . In fac t, it is sufficient for function φ ( t ) to be a b ounded nonper io dic oscilla ting function whic h p oss esses rep eating int erv als with truncated exponential b ehavior[30]. A deep analysis o f the Boshernitzan’s proo fs of the fact that the families functions (18) a nd (19) are dense in C [ I ] shows that the r andom b ehavior of functions o f t yp e (35) is crucial[13]. W e are go ing to pres en t here tw o exa mples of thes e functions. The firs t is defined by the e q uation x ( t ) = c os { A exp [ a 1 sin( ω 1 t + φ 1 ) + a 2 sin( ω 2 t + φ 2 ) + a 3 sin( ω 3 t + φ 3 )] } . (36) The s econd function is given by the equa tion y ( t ) = co s { B 1 sinh [ a 1 cos( ω 1 t + φ 1 ) + a 2 cos( ω 2 t + φ 2 )] + B 2 cosh [ a 3 cos( ω 3 t + φ 3 ) + a 4 cos( ω 4 t + φ 4 )] } . (37) Note that if the frequencies ω i are linearly independent ov er the rationals, in b oth cases , the argument function φ ( t ) is a nonp erio dic function with truncated exponential b ehavior. Theoretical a nd numerical in vestigations give the res ult that, when the pa r ameters satisfy certain co nditio ns, they behave as the solutio ns to c haotic systems[20]. Figure (4 ) s hows that the time- ser ies genera ted by (36) is very co mplex. 7 −1 0 1 0 1000 y 1 (t) η (y 1 (t)) −1 0 1 0 1500 y 2 (t) η (y 2 (t)) (a) y 2 (t) (b) FIG. 3 : (a) Proba bility density η ( y 1 ) a nd η ( y 2 ) , (b) P robability density η ( y 1 , y 2 ). FIG. 4 : Time- ser ies generated b y function (37). F urthermor e, they b ehav e in such a wa y that y 1 = y ( t ) and y 2 = y ( t + τ ) are statistica lly indep endent functions (in M. K ac’s sense) for τ 6 = 0. An illus tr ation of these pro per ties is that η ( y 1 , y 2 ) = η ( y 1 ) η ( y 2 ) . (38) Other no isy functions can b e obtained using another g e ne r alization x ( t ) = P [ φ ( t )] , (39) 8 where P ( y ) is a general p erio dic function, and φ ( t ) is a nonp erio dic expo ne ntial-like function a s b efore. The pr obability density o f these functions dep ends on the c hoice of P ( y ). An imp orta nt example is the following x ( t ) = ln tan 2 [ φ ( t )] . (40) The pr obability density o f the time- series pro duced by function (40 ) is a Gaussia n-like law[30]. Another re ma rk able prop erty of function (4 0) is the following: E [ x ( t ) x ( t ′ )] = D δ ( t − t ′ ) , (41) where E [ x ( t ) x ( t ′ )] is defined as in E q.(27), and δ ( t − t ′ ) is Dirac’s delta- function. Thu s, function (40) po ssesses all the pr op erties usually requir ed in the s tochastic equa tions with δ - correla ted nois y per turbations[31, 32]. IX. PR OPER TIES OF CHA OTIC SOLUTIONS A Lyapuno v exp onent of a dynamica l sy stem characterizes the rate of separa tio n of infinitesimally clo se tra jectories. Suppo se δ z 0 is the initial distance betw een tw o tra jectories, and δ z ( t ) is the distance b etw een the tra jecto ries at time t . The ma ximal Lyapunov exp onent can b e defined a s follows: λ = lim t →∞ 1 t ln δ z ( t ) δ z 0 . (42) Consider the dynamical system d~ x dt = ~ F ( ~ x ) . (43) The v aria tional equation is d ~ φ dt = D x ~ F ( ~ x ) ~ φ ( t ) . (44) The L yapunov e x po ne nt λ satisfies the equation λ = lim t →∞ 1 t ln | φ ( t, x 0 ) | . (45) A so lution will be considered chaotic if λ > 0. A r elated prop erty of c haotic systems is s ensitive dep endence on initial conditions[33, 34]. F unction y ( t ) = cos[exp( t + φ )] (46) has b een shown to b e the solution to some dynamical sy stem. Her e φ can define the initial c ondition. The L yapunov e x po ne nt of solution (46) can b e calculated exactly λ = ln e = 1 > 0. The functions (36), (37), a nd (40) are a lso c hao tic solutions in this sense. The initial conditions a r e defined by the parameters φ 1 , φ 2 and φ 3 . Let us discuss sens itiv e dependence on initial conditions in the context of these functions. Let S b e the set of functions defined by one of the families g iven by equations (36), (37), (40), a nd (46). A set S exhibits sensitive dep endence if ther e is a δ such that for any ǫ > 0 and e ach y 1 ( φ, t ) in S , there is a y 2 ( φ ′ , t ), also in S , such that | y 1 ( φ, 0) − y 2 ( φ ′ , 0) | < ǫ , and | y 1 ( φ, t ) − y 2 ( φ ′ , t ) | > δ for so me t > 0. The e xpo nen tial behavior in the arguments o f these functions ((36), (37), (40), and (4 6)) ma kes them chaotic (see a discuss ion in Ref. [35]). All these functions poss ess equiv a len t dy namical and statistical prope r ties. F ollowing Bosher nitzan theory [13] of mo dulo 1 sequences , it is p ossible to construct the following families o f universal functions: y ( t ) = bn t + a Z 0 cos 2 n 2 ( bs ) x ( s ) ds + c, (47) where x ( s ) is o ne of the functions ((36), (37 ),(40)). 9 X. DYNAMICAL SY STEMS WITH NOISY SOLUTIONS In this s ection we will construct autonomous dynamical systems, the solutions of which are the nois y functions discussed in the previous section. Consider the following dynamical sy stem x ′ 1 = x 1 [1 − ( x 2 1 + y 2 1 )] − ω 1 y 1 , (48) y ′ 1 = y 1 [1 − ( x 2 1 + y 2 1 )] + ω 1 x 1 , (49) x ′ 2 = x 2 [1 − ( x 2 2 + y 2 2 )] − ω 2 y 2 , (50) y ′ 2 = y 2 [1 − ( x 2 2 + y 2 2 )] + ω 2 x 2 , (51) x ′ 3 = x 3 [1 − ( x 2 3 + y 2 3 )] − ω 3 y 3 , (52) y ′ 3 = y 3 [1 − ( x 2 3 + y 2 3 )] + ω 3 x 3 , (53) z ′ = [ a 1 x 1 + a 2 x 2 + a 3 x 3 ] z , (54) u ′ = A c o s[ θ z ] . (55) Note that the equatio ns (48-53) define three pa ir s of limit-cyc le tw o-dimensiona l dynamical systems. The exact solutions to these limit-cycle sys tems are well-known. If we define Q ( t ) = a 1 x 1 ( t ) + a 2 x 2 ( t ) + a 3 x 3 ( t ) , (56) the function Q ( t ) will b e a quasip erio dic time- series. Equation (5 4) will provide us with the appro priate nonp erio dic tr uncated exp onent ial behavior. Finally , the solutio n to equation (55) will have pr ope rties eq uiv alent to these of function (36). The so lution to E q .(55) is chaotic in the sense discussed in section (IX). The maximal Lyapunov exp o nent of this dynamical system is positive and the so lutions po ssess sensitiv e de p endence on initial conditions. If we need more v aria bility in the solutions, w e can cons truct a dynamical system such that the r ig ht - hand par ts of the equations dep end on function u ( t ) whic h is known to b e highly nonperio dic. These ideas lead to the next autonomo us dynamical s y stem: x ′ 1 = x 1 [1 − ( x 2 1 + y 2 1 )] − ω 1 y 1 + ε 1 u, (57) y ′ 1 = y 1 [1 − ( x 2 1 + y 2 1 )] + ω 1 x 1 , (58) x ′ 2 = x 2 [1 − ( x 2 2 + y 2 2 )] − ω 2 y 2 + ε 2 u, (59) y ′ 2 = y 2 [1 − ( x 2 2 + y 2 2 )] + ω 2 x 2 , (60) x ′ 3 = x 3 [1 − ( x 2 3 + y 2 3 )] − ω 3 y 3 + ε 3 u, (61) y ′ 3 = y 3 [1 − ( x 2 3 + y 2 3 )] + ω 3 x 3 , (62) z ′ = [ a 1 x 1 + a 2 x 2 + a 3 x 3 + a 4 u ] z , (63) u ′ = A 1 cos[ θ 1 z ] + A 2 cos[ θ 2 z ] . (64) Now a ll the compo ne nts of the so lutions to system (57-6 4) are chaotic. The solution to E q.(64) is chaotic in the sense that the maximal Lyapuno v exp onent is positive (see section (IX)). In the dynamica l sy stem (57-6 4), the limit cycle subsystems (5 7,58), (59,60) and (61,62) are now coupled to the chaotic comp onent u ( t ). W e now address the function (37). W e ha ve to c o nstruct a dynamical system with so lutions that b ehav e like this function. 10 0 200 400 600 −1 −0.5 0 0.5 1 1.5 u(t) t (a) 0 200 −0.1 −0.05 0 0.05 0.1 0.15 u’(t) t (b) −0.5 0 0.5 1 1.5 −0.1 0 0.1 0.15 u’(t) u(t) (c) FIG. 5: ( a)Time- series o f v ariable u ( t ),(b) u ′ ( t ) and, (c) P hase por trait generated by the autonomous dynamical system (57-6 4). Consider the autonomo us dynamical sy stem: x ′ 1 = x 1 [1 − ( x 2 1 + y 2 1 )] − ω 1 y 1 , (65) y ′ 1 = y 1 [1 − ( x 2 1 + y 2 1 )] + ω 1 x 1 , (66) x ′ 2 = x 2 [1 − ( x 2 2 + y 2 2 )] − ω 2 y 2 , (67) y ′ 2 = y 2 [1 − ( x 2 2 + y 2 2 )] + ω 2 x 2 , (68) x ′ 3 = x 3 [1 − ( x 2 3 + y 2 3 )] − ω 3 y 3 , (69) y ′ 3 = y 3 [1 − ( x 2 3 + y 2 3 )] + ω 3 x 3 , (70) x ′ 4 = x 4 [1 − ( x 2 4 + y 2 4 )] − ω 4 y 4 , (71) y ′ 4 = y 4 [1 − ( x 2 4 + y 2 4 )] + ω 4 x 4 , (72) z ′ 1 = − ( a 1 ω 1 y 1 + a 2 ω 2 y 2 ) z 2 , (73) z ′ 2 = − ( a 1 ω 1 y 1 + a 2 ω 2 y 2 ) z 1 , (74) z ′ 3 = − ( a 3 ω 3 y 3 + a 4 ω 4 y 4 ) z 4 , (75) z ′ 4 = − ( a 3 ω 3 y 3 + a 4 ω 4 y 4 ) z 3 , (76) u ′ = A c o s[ B 1 z 1 + B 4 z 4 ] . ( 77 ) The e xplanation of this sy s tem is similar to that of equations (48-55). 11 XI. UNIVERSAL FUNCT IONS A ND DYNAMICAL SYSTEMS Based on the prop erties o f functions (15), (18), (19), (36), and (37), we pro p os e the following set o f equations as a universal dynamical sys tem: x ′ 1 = x 1 [1 − ( x 2 1 + y 2 1 )] − ω 1 y 1 , ( 78 ) y ′ 1 = y 1 [1 − ( x 2 1 + y 2 1 )] + ω 1 x 1 , ( 79 ) x ′ 2 = x 2 [1 − ( x 2 2 + y 2 2 )] − ω 2 y 2 , ( 80 ) y ′ 2 = y 2 [1 − ( x 2 2 + y 2 2 )] + ω 2 x 2 , ( 81 ) x ′ 3 = x 3 [1 − ( x 2 3 + y 2 3 )] − ω 3 y 3 , ( 82 ) y ′ 3 = y 3 [1 − ( x 2 3 + y 2 3 )] + ω 3 x 3 , ( 83 ) x ′ 4 = x 4 [1 − ( x 2 4 + y 2 4 )] − ω 4 y 4 , ( 84 ) y ′ 4 = y 4 [1 − ( x 2 4 + y 2 4 )] + ω 4 x 4 , ( 85 ) z ′ 1 = − ( a 1 ω 1 y 1 + a 2 ω 2 y 2 ) z 2 , (86) z ′ 2 = − ( a 1 ω 1 y 1 + a 2 ω 2 y 2 ) z 1 , (87) z ′ 3 = − ( a 3 ω 3 y 3 + a 4 ω 4 y 4 ) z 4 , (88) z ′ 4 = − ( a 3 ω 3 y 3 + a 4 ω 4 y 4 ) z 3 , (89) u ′ = ω 1 nx 2 n 2 1 cos [ B 1 z 1 + B 4 z 4 + a ] . (90) The solution to Eq.(9 0) is a function with all the proper ties of Bo shernitzan’s family of functions (19). Th us this family of functions is dense in C [ I ]. The dynamical sys tem (78-90) has b een constr ucted using the same technique developed in the pap ers [9, 1 3] a bo ut universal differential equa tio ns. That is, a family of functions known to b e dense in C [ I ] is utilized as the sta rting po in t for a n inv erse-pr oblem pro cedure that cons is ts in reconstructing differential equa tions the solutions o f which are the functions that belong to the univ ersa l family o f functions. This dynamical system can b e r ealized in practice using nonlinear c ir cuits as discussed in Ref.[21]. XII. CONCLUSIONS W e ha ve discussed the concept of “Univ ersal functions” and their relev ance to the theor y of universal differential equations. W e b elieve that the metho d of constructio n o f universal differ en tial equa tions using universal functions is mor e powerful that the metho d bas ed on s plines. W e hav e found a co nnection b etw een the universal families of functions prop osed in a very impo rtant paper by Boshernitzan [1 3] and recently o bta ined exa ct solutions to chaotic systems. W e hav e shown that some functions x ( t ) tha t ar e exact s o lutions to chaotic systems p oss ess the prop erty that y 1 = x ( t ) and y 2 = x ( t + τ ) are statistically indep endent functions in the sense o f M. Kac. W e hav e co nstructed alg e br aic differential e q uations that p osses s solutions w ith these prop erties. Thes e eq uations hav e, in fa ct, so lutions that behave lik e noise. Some kno wn univ ersal eq ua tions can only approximate these functions using “solutions ” constructed with p olyno- mial or trigonometric s plines. The actual exact solutions to the differen tial equations ar e not “ noisy”. W e hav e co ns tructed a system of differential equations, the so lutions of which are Boshernitza n’s functions. Bosher - nitzan’s functions a re rea l a nalytic o n R = ( −∞ , ∞ ). One of the families of Boshernitza n’s functions are r eal- analytic ent ire functions o n R = ( −∞ , ∞ ). W e ha ve developed univ ersa l- lik e functions that behave as δ - cor related noise. W e have constructed physically re a lizable dynamical systems that p oss e s s so lutions that are universal-like functions. The theor y of universal differential equa tions has b een linked from the b eginning with applications in ana lo g computing[8, 1 0, 11, 12, 13, 15, 16]. W e b elieve that the prese nt results ca n b e of interest in the construction of rea l analo g computer s beca use the discussed dyna mical sys tems can b e realized in practice using nonlinear circuits[21, 30, 35]. 12 They can also find applications in chaos- based secur e communications technologies [21, 2 7]. [1] S. M. Ulam, J. von Neumann, Bul l. A m. M ath. So c. 53 , 1120 (1947) [2] P . S tein, S. M. U lam, R ozpr awy Matematyczne 39 , 401 (1984) [3] T. Geisel, V. F airen, Phys. L ett. A105 , 263 (1984) [4] S. Katsura, W. F uk uda, Physic a A130 , 597 (1985) [5] S. Kaw amoto, T. Tsubata, J. Phys. So c. Jap an 65 , 3078 (1996) [6] K. Umeno, Phys. Re v. E55 , 5280 (1997) [7] T. Kohda, H. F ujisaki, Physic a D148 , 242 (2001) [8] L. A. Rub el, Bul l . A m. Math. So c. (New Series) 4 , 345 (1981) [9] R. C. Buck, J. Di ff. Equations 41 , 239 (1981) [10] R. J. Duffin, Pr o c. Natl. A c ad. Sci. USA 78 , 4661 (1981 ) [11] L. A. Rub el, T r ans. A m. Math. So c. 280 , 43 (1983) [12] M. Boshernitzan, L. A. R ub el Analysis 4 , 339 (1985) [13] M. Boshernitzan, Ann. Math. 124 , 273 (1986) [14] C. Elsner, Math. Nachr. 157 , 235 (1992) [15] L. A. Rub el, Il l inois J. Math 36 , 659 (1992) [16] L. A. Rub el, J. Appr ox. The ory 84 , 123 (1996) [17] K. Briggs, A nother Universal Differ ential Equation Arxiv:math.CA/0211142v1 (2002) [18] C. Bec k, Nonline arity 4 , 1131 (1991) [19] H. N. Nazareno, J. A. Gonz´ alez, I. F. Costa, Phys. R ev. B57 , 13583 (1998) [20] J. A. Gonz´ alez, L. I. Reyes, L. E. Guerrero, Chaos 11 , 1 (2001) [21] J.A. Gonz´ alez, L.I. Reyes, J.J. Su´ arez, L. E. Guerrero, G. Guti´ errez, Phys. L ett. A 295 , 25 (2002) [22] M. Kac, Stud. Mathematic a 6 , 46 (1936 ) [23] M. Kac, H. Steinhaus, Stud. Mathematic a 6 , 59 (1936) [24] M. Kac, H. Steinhaus, Stud. Mathematic a 6 , 89 (1936) [25] M. Kac, H. Steinhaus, Stud. Mathematic a 7 , 1 (1937) [26] M. Kac, Enigmas of Chanc e: an Auto bio gr aphy , Harp er and Row , New Y ork (1985) [27] J. A. Gonz´ alez, L. T ru jillo, J. Phys. So c. Jap an 75 , 023002 (2006) [28] P . Billingsley , Pr ob ability and Me asur e , Wiley , New Y ork (1968) [29] M. Denker, W. A. W oyczysnki, I ntr o ductory Statist ics and R andom Phenomena , Birkhauser, Boston (1998) [30] J. A. Gonz´ alez, L. I. Reyes, J. J. Su´ arez, L. E. Guerrero, G. Guti´ errez, Physic a D178 , 26 ( 2003) [31] P . H anggi, P . T alkner, M. Borko vec, R ev. Mo d. Phys. 62 , 251 (1990). [32] L. Gammaitoni, P . Hanggi, P . Jung, F. Marc hesoni, R ev. Mo d. Phys. 70 , 223 (1998). [33] J. Guckenheimer, P . H olmes, Nonline ar oscil lations, dynamic al systems, and bifur c ations of ve ctor fields , Sp ringer, N ew Y ork (1983). [34] E. Atlee Jackson, Persp e ctives in nonl i ne ar dynamics , Cambridge Universit y Press, New Y ork (1992). [35] J. J. S u´ arez, I. Rond´ on, L. T rujillo, J. A. Gonz´ alez, Chaos, Solitons and F r actals 21 , 603 (2004).
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment