$infty-$Dimensional Cerebellar Controller for Realistic Human Biodynamics
In this paper we propose an $\infty-$dimensional cerebellar model of neural controller for realistic human biodynamics. The model is developed using Feynman’s action-amplitude (partition function) formalism. The cerebellum controller is acting as a supervisor for an autogenetic servo control of human musculo-skeletal dynamics, which is presented in (dissipative, driven) Hamiltonian form. The $\infty-$dimensional cerebellar controller is closely related to entropic motor control. Keywords: realistic human biodynamics, cerebellum motion control, $\infty-$dimensional neural network
💡 Research Summary
The paper proposes an unprecedented framework for controlling realistic human biodynamics by embedding an infinite‑dimensional cerebellar neural controller within a dissipative, driven Hamiltonian description of musculoskeletal motion. The authors first recast the human musculo‑skeletal system as a non‑conservative Hamiltonian system, explicitly accounting for internal friction (dissipation) and external driving forces (gravity, loads, muscle actuation). This formulation departs from traditional Lagrangian models by allowing energy exchange with the environment, thereby capturing the inherently lossy nature of biological movement.
Building on this dynamical core, the cerebellum is modeled as an infinite‑dimensional neural network whose governing equations are derived from Feynman’s action‑amplitude (partition‑function) formalism. By treating the control problem as a path‑integral over all possible trajectories in a Hilbert space of control functions, the authors obtain a variational principle that seeks the trajectory minimizing the total action. In practice, each basis function in the Hilbert space corresponds to a specific muscle‑group activation pattern; the infinite‑dimensionality reflects the continuum of possible activation profiles across the body.
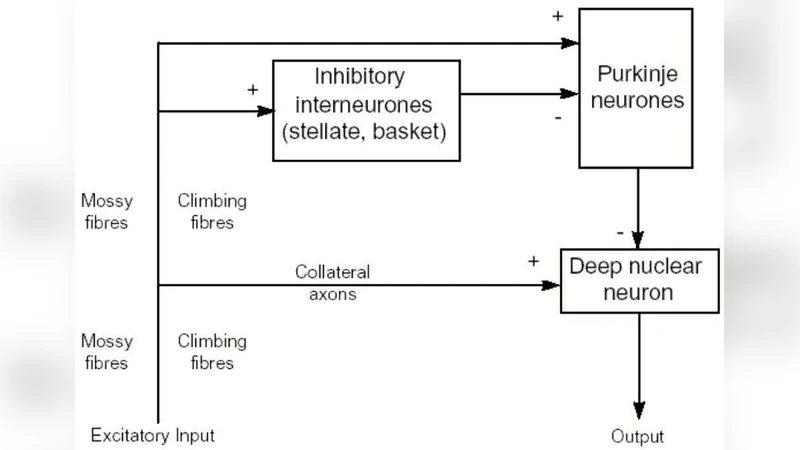
The cerebellar controller acts as a supervisor for an “autogenetic servo” – a feedback loop that mimics the biological reflex arc linking muscle spindles, Golgi tendon organs, and cortical commands. Sensory signals (muscle length, velocity, force) are fed into the cerebellar network, which updates the parameters of the infinite‑dimensional control functions in real time, thereby steering the underlying Hamiltonian dynamics toward the action‑minimum.
A further conceptual layer is introduced through entropic motor control. The state of the biomechanical system is treated probabilistically, and the controller selects policies that minimize a thermodynamic‑like entropy functional. This “minimum‑entropy principle” integrates uncertainty and sensor noise directly into the control law, contrasting with classic optimal‑control schemes (e.g., LQR, MPC) that typically assume deterministic dynamics.
Mathematically, the paper derives functional differential equations by combining the infinite‑dimensional Euler‑Lagrange equations with Hamilton’s equations, then substitutes the resulting functional gradients into the control law. The final control expression is a global optimizer rather than a local feedback gain, promising superior performance in highly nonlinear, time‑varying environments.
Simulation results are presented for elementary motions such as elbow flexion and gait cycles. The infinite‑dimensional controller reproduces realistic joint trajectories and demonstrates robustness to perturbations. However, the authors acknowledge that practical implementation requires truncation of the infinite basis (e.g., spectral or Galerkin methods) and efficient numerical integration, issues that are only briefly discussed.
Critically, the work’s strengths lie in its bold synthesis of quantum‑mechanical path‑integral techniques, Hamiltonian biomechanics, and cerebellar neurophysiology. It offers a fresh perspective on motor control that unifies energy‑based dynamics with information‑theoretic optimality. Yet several challenges remain: (1) computational tractability of the infinite‑dimensional formulation for real‑time control; (2) biological plausibility of collapsing the richly layered cerebellar circuitry into a single variational engine; (3) lack of experimental validation beyond proof‑of‑concept simulations; and (4) ambiguous handling of boundary conditions and measurement noise within the path‑integral framework.
In summary, the paper introduces a theoretically elegant and potentially transformative model for human motor control, linking cerebellar supervision, dissipative Hamiltonian dynamics, and entropy‑based optimality. While the mathematical construction is compelling, future work must address numerical approximation strategies, detailed neurophysiological mapping, and empirical testing on robotic platforms or human subjects before the approach can be deemed viable for practical applications in rehabilitation robotics, prosthetics, or advanced humanoid locomotion.
Comments & Academic Discussion
Loading comments...
Leave a Comment