Genetic Algorithms for multiple objective vehicle routing
The talk describes a general approach of a genetic algorithm for multiple objective optimization problems. A particular dominance relation between the individuals of the population is used to define a fitness operator, enabling the genetic algorithm …
Authors: ** M. J. Geiger (University of Hohenheim, Production, Operations Management) **
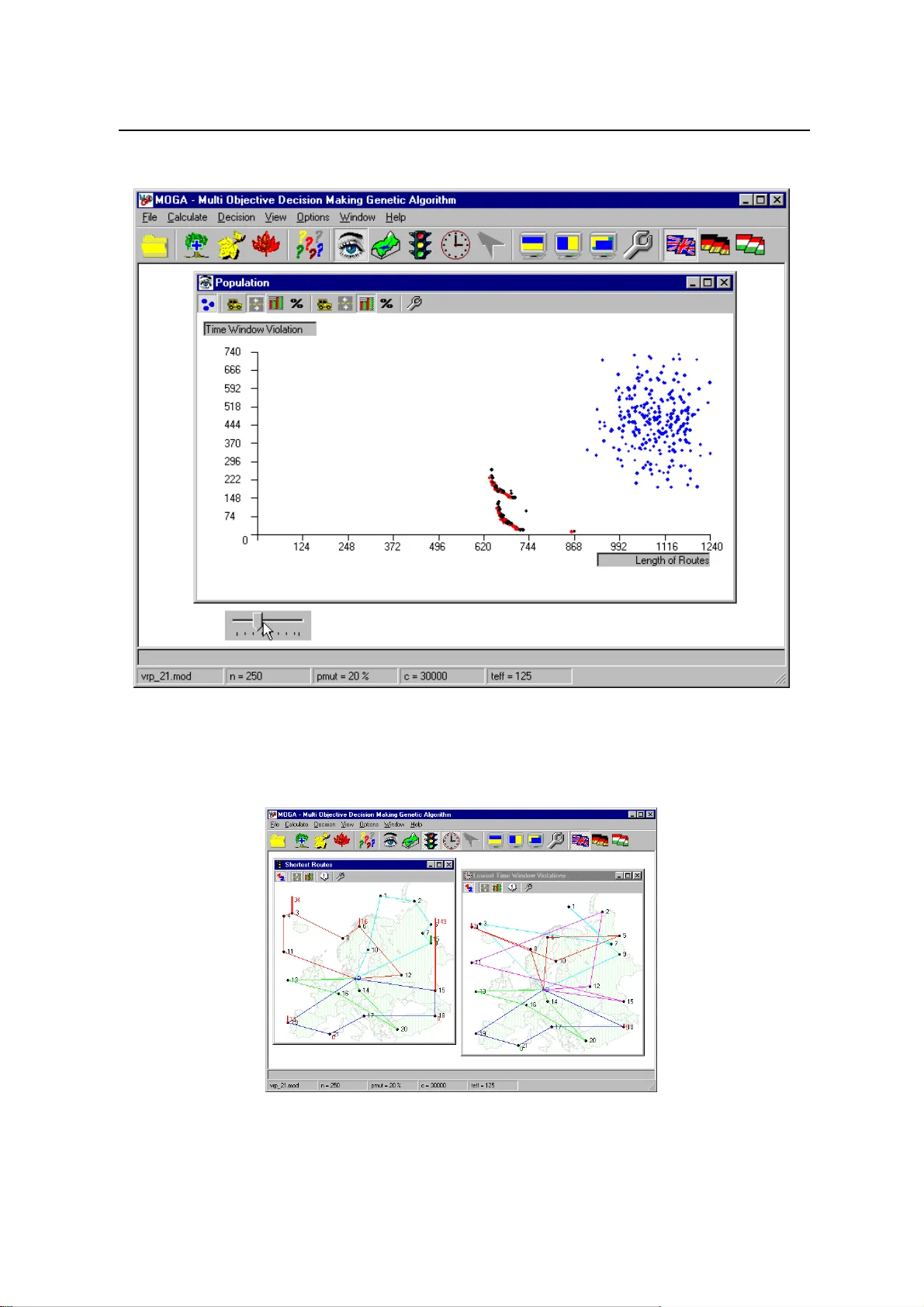
Genetic Algorithms for m ultiple ob jectiv e v ehicle routing M.J. Geiger ∗ ∗ Produ ction and Op erations Managemen t Institute 510 - Business Administration Universit y of Hohenheim Email: mail@martingeiger.d e Abstract The talk describ es a general approac h of a genetic algorithm for multiple ob jectiv e optimization problems. A particular domi nan ce relation b etw een the individuals of th e p opulation is u sed to define a fitness op erator, enabling the genetic algorithm to adress ev en problems with efficient, bu t conv ex-dominated alternatives. The algorithm is implemented in a multil ingual computer p rogram, solving vehicle routing problems with time windows under m ultiple ob jectiv es. The graphical user interf ace of the program shows th e p rogress of the genetic alg orithm and the main p arameters of the approach can b e easily mod ified. In add ition t o that, the program p ro vides pow erful decision supp ort t o the decision maker. The soft ware has prov ed it´s excellence at t h e fin als of t he Europ ean Academic Soft ware Award EASA, held at the Keble college/ Un ivers ity of O xford/ Great Britain. 1 The Genetic Algorithm for m ultiple ob jectiv e optimization problems Based on a single ob jective genetic algorithm, different extensions for m ultiple o b jective optimiza tion problems ar e prop osed in literature [1, 4, 8, 1 0] All of them tackle the m ultiple ob jectiv e elemen ts by mo difying the ev aluation and selection opera tor of the genetic algor ithm. Compared to a s ing le ob jective pr oblem, more than one ev aluation functions are co ns idered and the fitness of the individua ls cannot b e directly c alculated fr om the (one) o b jective v alue. Efficient but con vex-dominated alterna tives are difficult to obtain by integrating the consider ed ob jectives to a weigh ted sum (Figure 1). T o overcome this problem, an approa ch of a selection-o p erator is pres ent ed, using o nly few information and providing a underlying self-adaption technique. In this approach, we use dominanc e -information of the individua ls of the p opula tion by calculating for each individual i the num ber of alternatives ξ i from which this individual is dominated. F or a po pulation co nsisting o f n pop alternatives we get v alues of: 0 ≤ ξ i ≤ n pop − 1 (1) Individuals that are not b eing dominated by other s sho uld rec eive a hig he r fitness v alue than individua ls that are b eing dominated, i.e.: if ξ i < ξ j → f ( i ) > f ( j ) ∀ i, j = 1 , . . . , n pop (2) if ξ i = ξ j → f ( i ) = f ( j ) ∀ i, j = 1 , . . . , n pop (3) MIC’2001 - 4 th Me taheuristics In ternational Conference 2 Figure 1 : Efficie nt, conv ex- do minated alternatives W e calculate the fitness v alue for each individual i b y a linear normalization. Individuals with the low est v alues of ξ i ( ξ i = 0) receive the hig hest co rresp onding v alue of f ( i ) = f max and the individual with the highest v alue ξ max = max[ ξ i ] ∀ i = 1 , . . . , n pop receive the lo west v alue of f ( i ) = f min . f max ≫ f min ≥ 0 (4) As a result we obtain: f ( i ) = f max − f max − f min ξ max ∗ ξ i (5) 2 The implemen tatio n [7] The approach of the genetic alg o rithm is implemen ted in a computer pr ogram which so lves vehicle routing problems with time windows under m ultiple ob jectives [6]. The examined ob jectives are: • Minimizing the total distances traveled by the vehicles. • Minimizing the n umber of vehicles used. • Minimizing the time window viola tion. • Minimizing the n umber of vio lated time windows. The progr am illustrates the progr ess of the genetic algor ithm and the parameters of the appro ach of the can simply be controlled by the graphical user in terface (Figure 2). In addition to the neces sary calcula tions, the obtained alternatives of the vehicle routing pr o blem can ea sily b e compared, a s shown in Figure 3. F or exa mple the alternative with the shortest routes is compa r ed to the alternative having the lowest time window violations . The windo ws show the routes, trav elled by the vehicles from the dep o t to the customers. The time window viola tio ns are visualized with vertical bars at each custo mer. Red: The vehicle is too late, green: the truc k arrives to o early . F or a more detailed comparison, inv ers e ra dar charts a nd 3D-vie ws are av ailable, showing the trade- off b etw een the ob jective v alues of the selected alterna tives (Figure 4). P orto, P ortugal, July 16-20, 2001 MIC’2001 - 4 th Me taheuristics In ternational Conference 3 Figure 2 : Pr ogres s of the genetic algorithm Figure 3 : Compa rison of obtained a lternatives P orto, P ortugal, July 16-20, 2001 MIC’2001 - 4 th Me taheuristics In ternational Conference 4 Figure 4 : Decision support mo de, sho wing tra de-offs References [1] T. B¨ ack and H.-P . Sc hw efel. Evolutionary computatio n: An ov erview. In Pr o c. 199 6 IEEE Int . Conf. Evolutionary Computation , pages 2 0–29, Pisc a taw ay NJ, 1996. IEEE Ser vice Ce n ter . [2] L. Davis. A g enetic algo rithms tutorial. In L. Davis, editor, Handb o ok of genetic algo rithms , pages 1–101 . 1991 . [3] M. Desro chers, J.K . Lenstra, a nd M.W.P . Sav elsb ergh. A cla ssification scheme for v ehicle ro uting and sc heduling problems. Eur op e an J. Op er. R es. , 46:3 22–3 32, 1990 . [4] C.M. F onseca and P .J. Fleming. Genetic a lgorithms for multiob jectiv e o ptimization: formulation, discussion and generaliza tio n. In F o rrest S., edito r , Genetic Algorithms: Pr o c. 5-th Int. Conf. , pages 416–423 . Morga n Kaufmann, 1 993. [5] C.M. F onseca a nd P .J . Fleming. An ov erview of evolutionary algorithms in multi-ob jective opti- mization. Evolutionary Computation , 3:1– 16, 1995 . [6] T.J. Ga s kell. B ases for v ehicle fleet scheduling. Op er. R es. Quart. , 18:281– 295, 196 7. [7] M.J. Geiger. Konzeption eines genetischen algorithm us zur l¨ osung m ultikriterielle r opti- mierungspro bleme. Depar tmen t of Pro ductions and Op erations Management, Institute 5 10 - B usi- ness Administration, Universit y of Hohenheim, German y . (in German). [8] J. Horn. Multicriter ion decision making. In B¨ ac k T. and F ogel D.B., editors, Handb o ok of evolu- tionary c omputation , pages 1–1 5. IOP Publ. & Exford Press , New Y ork, 19 97. [9] J.D. Schaffer. Multiple ob jective optimiza tion with v ecto r ev aluated genetic a lgorithms. In Grefen- stette J.J ., editor, Genetic Algorithms and Their Applic ations: Pr o c. 1-t h Int. Conf. Genetic Al- gorithms , pages 93 –100, Hillsdale NJ, 19 85. P orto, P ortugal, July 16-20, 2001 MIC’2001 - 4 th Me taheuristics In ternational Conference 5 [10] H. T amaki, H. K ita, and S. Kobay as hi. Multi-ob jective optimizatio n by genetic a lgorithms: A review. In Pr o c. 1996 IEEE Int. Conf. Evolutionary Computation , pa ges 517– 522, Piscataw ay NJ, 1996. I E EE Ser v ice Center. P orto, P ortugal, July 16-20, 2001
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment