The Effect of Sensory Blind Zones on Milling Behavior in a Dynamic Self-Propelled Particle Model
Emergent pattern formation in self-propelled particle (SPP) systems is extensively studied because it addresses a range of swarming phenomena which occur without leadership. Here we present a dynamic SPP model in which a sensory blind zone is introduced into each particle’s zone of interaction. Using numerical simulations we discovered that the degradation of milling patterns with increasing blind zone ranges undergoes two distinct transitions, including a new, spatially nonhomogeneous transition that involves cessation of particles’ motion caused by broken symmetries in their interaction fields. Our results also show the necessity of nearly complete panoramic sensory ability for milling behavior to emerge in dynamic SPP models, suggesting a possible relationship between collective behavior and sensory systems of biological organisms.
💡 Research Summary
The paper investigates how limited sensory perception—specifically a forward “blind zone”—affects the emergence and stability of milling patterns in a dynamic self‑propelled particle (SPP) model. Building on classic SPP frameworks where each agent aligns with neighbors within a circular interaction radius, the authors modify the perception field so that a sector of angle θ_b directly ahead of each particle is invisible. Within the remaining 360° – θ_b, particles still detect neighbors and adjust their heading toward the average direction of those detected, while moving forward at a constant speed v₀.
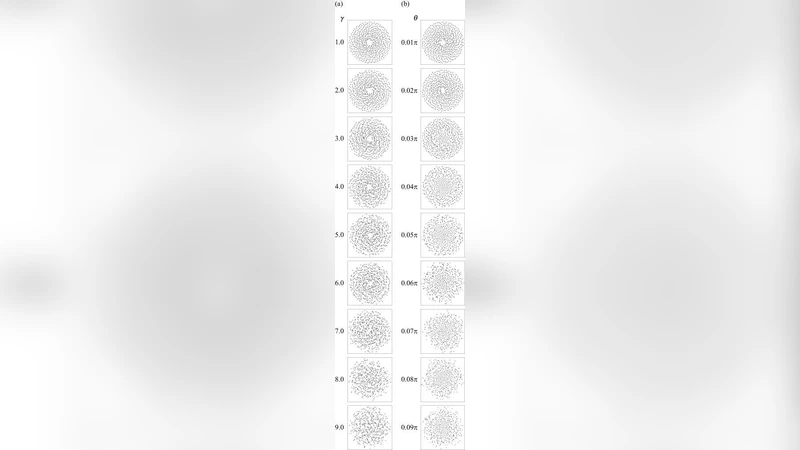
Using numerical simulations with parameters identical to the standard milling model (N = 300 particles, interaction radius R = 1.0, alignment strength α = 1.0, time step Δt = 0.1), the blind‑zone angle is varied from 0° to 180° in 5° increments. For each θ_b the system is run for at least 10 000 steps, and macroscopic observables such as mean speed ⟨v⟩, milling radius r_m, angular momentum, and spatial density distribution are recorded.
Two distinct transitions are uncovered as θ_b increases. The first, occurring around θ_b ≈ 30°–45°, is a “speed‑reduction transition.” Partial loss of forward vision reduces the frequency with which particles sense each other, weakening the alignment torque. Consequently the average translational speed drops sharply (≈15–20 % relative to the blind‑zone‑free case) and the milling radius contracts by roughly 10–20 %. The second transition appears when the blind zone exceeds about 90°. At this point a subset of particles becomes essentially immobile, forming a dense, stationary core, while the remaining agents orbit irregularly around it. This “stationary‑inhomogeneous transition” is characterized by a breakdown of symmetry in the interaction field: particles behind the core still receive alignment cues, but those in front receive none, leading to a spatially heterogeneous structure that is not observed in noise‑driven transitions of traditional SPP models.
The authors emphasize that these transitions are fundamentally different from the well‑studied noise‑induced order‑disorder transition. Here the driver is deterministic—an anisotropic perception field—rather than stochastic fluctuations. The results therefore highlight that collective motion is not only a function of interaction strength and noise amplitude, but also of the geometry of sensory acquisition.
A key biological implication emerges: many schooling fish, flocking birds, and swarming insects possess nearly panoramic forward vision. The simulations show that even a modest blind‑zone of 10° can destabilize milling, suggesting that the evolution of wide‑angle visual fields may be a prerequisite for robust collective patterns in nature.
The paper also discusses model robustness. Varying particle density, speed, or alignment strength shifts the critical blind‑zone angles but does not eliminate the two‑step transition structure, indicating that the phenomenon is generic across a broad parameter space. The authors propose future work that includes (i) testing alternative blind‑zone shapes (e.g., asymmetric or moving blind spots), (ii) comparing model predictions with empirical trajectory data from animal groups, and (iii) applying the findings to engineered swarms of robots where sensor placement can be deliberately constrained.
In summary, by introducing a sensory blind zone into a dynamic SPP framework, the study reveals that near‑complete panoramic sensing is essential for the formation and persistence of milling behavior. The discovery of a novel, spatially non‑homogeneous transition driven by broken interaction symmetry expands our theoretical understanding of self‑organized motion and offers concrete insights into the link between sensory system design and collective animal behavior.
Comments & Academic Discussion
Loading comments...
Leave a Comment