Design of Attitude Stability System for Prolate Dual-spin Satellite in Its Inclined Elliptical Orbit
In general, most of communication satellites were designed to be operated in geostationary orbit. And many of them were designed in prolate dual-spin configuration. As a prolate dual-spin vehicle, they have to be stabilized against their internal energy dissipation effect. Several countries that located in southern hemisphere, has shown interest to use communication satellite. Because of those countries southern latitude, an idea emerged to incline the communication satellite (due to its prolate dualspin configuration) in elliptical orbit. This work is focused on designing Attitude Stability System for prolate dual-spin satellite in the effect of perturbed field of gravity due to the inclination of its elliptical orbit. DANDE (De-spin Active Nutation Damping Electronics) provides primary stabilization method for the satellite in its orbit. Classical Control Approach is used for the iteration of DANDE parameters. The control performance is evaluated based on time response analysis.
💡 Research Summary
**
The paper addresses the problem of stabilizing the attitude of a prolate‑shaped dual‑spin communication satellite when it is placed in an inclined elliptical orbit, a scenario motivated by the interest of southern‑hemisphere nations to reuse or deploy GEO‑type satellites at higher latitudes. Traditional dual‑spin satellites, such as the INTELSAT IV series and the Indonesian Palapa B2R, were designed for geostationary, equatorial operation. Their prolate configuration, while advantageous for launch‑vehicle constraints, suffers from internal energy dissipation that can excite nutation and cause attitude drift. To overcome this, the authors propose using De‑spin Active Nutation Damping Electronics (DANDE) as the primary stabilization mechanism, supplemented by an Active Nutation Control (ANC) backup.
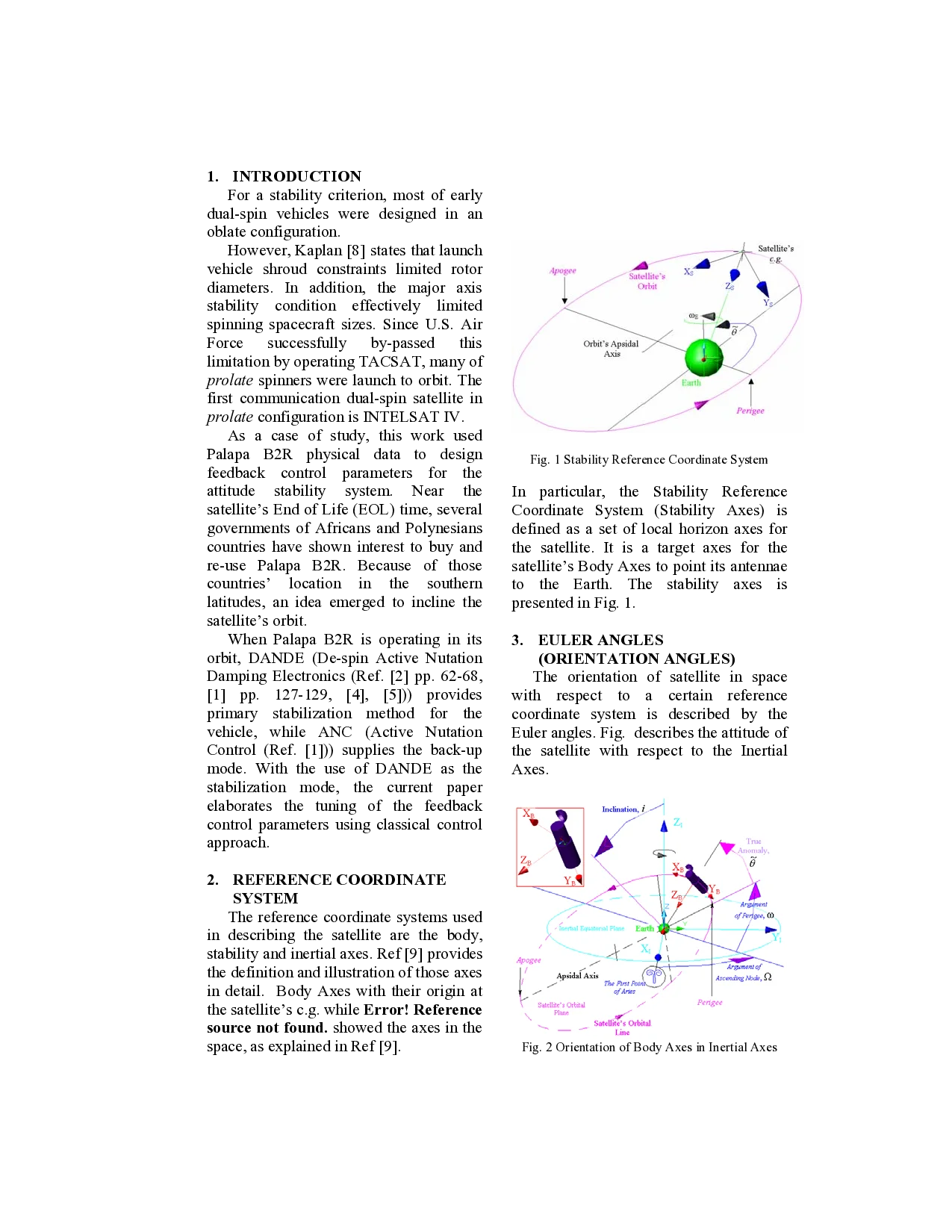
The work begins by defining three reference frames – Body, Stability, and Inertial – and describing satellite orientation with Euler angles (θ for pitch, φ for roll, ψ for yaw). Using the physical parameters of Palapa B2R, a state‑space model is derived in the Stability frame. The A‑matrix contains terms (A₁₄, A₂₅, A₃₅, δn) that vary with orbital eccentricity and inclination, making the dynamics time‑varying. For the purpose of applying classical linear control techniques, the authors first fix these terms to their values for a circular, equatorial orbit and then design separate feedback loops for each attitude axis.
Pitch (θ) control: A θ‑feedback loop is constructed, and root‑locus analysis shows insufficient damping with a simple proportional gain. A compensator of the form K·(s+0.498)/(s+1) is introduced, moving the dominant poles leftward and achieving a damping ratio that brings pitch oscillations below 0.01° within about 60 seconds. The final transfer function includes an additional high‑frequency pole (s+29800) to limit actuator bandwidth.
Roll (φ) control: A p‑feedback (roll rate) loop is employed. Because the open‑loop system exhibits a right‑half‑plane pole, the authors first apply negative feedback to shift the pole across the imaginary axis, then design a lead‑lag compensator Kₚ·(s+63.25)/(s+1.4)·(s+10.5). This yields a stable closed‑loop with roll librations damped to less than 10⁻⁴ rad (≈0.005°) within 30 seconds.
Yaw (ψ) control: A r‑feedback (yaw rate) loop is used with a fixed gain Kᵣ = 300. The root‑locus shows the dominant poles already lie in the left half‑plane, so no additional lead compensation is required. Yaw oscillations are suppressed to non‑oscillatory behavior, with any residual drift staying well within the Palapa B2R pointing budget of 0.047°.
Simulation is performed in MATLAB/Simulink 6.5. The authors vary eccentricity (e = 0.2) and inclination (i = 0° → 30°) and run the closed‑loop model for ten orbital periods (≈2257 s). Results show:
- Pitch: Eccentricity has negligible effect after compensation; the response settles within 60 s and the amplitude stays below 0.01°.
- Roll: Eccentricity reduces the open‑loop amplitude; inclination modestly increases the closed‑loop amplitude but remains under 10⁻⁵ rad. Damping time stays under 30 s.
- Yaw: Eccentricity introduces a long‑period, low‑amplitude oscillation (≈10⁻⁴ rad) after ~200 s, but the system quickly returns to a steady state. Inclination similarly raises the amplitude slightly but never exceeds the pointing budget.
The authors conclude that a classical‑control‑based design, combined with the DANDE hardware, provides robust attitude stabilization for prolate dual‑spin satellites in inclined elliptical orbits. The closed‑loop system successfully damps pitch, roll, and yaw librations within 30–60 seconds, and it exhibits resilience to variations in orbital eccentricity and inclination. This work therefore expands the operational envelope of existing GEO‑type communication satellites, enabling their reuse by southern‑hemisphere nations without extensive redesign. Future work is suggested on hardware‑in‑the‑loop testing, inclusion of additional disturbances (solar radiation pressure, magnetic torques), and development of integrated nonlinear control strategies.
Comments & Academic Discussion
Loading comments...
Leave a Comment