Linking diagrams for free
Linking diagrams with path composition are ubiquitous, for example: Temperley-Lieb and Brauer monoids, Kelly-Laplaza graphs for compact closed categories, and Girard's multiplicative proof nets. We construct the category Link=Span(iRel), where iRel i…
Authors: Dominic J. D. Hughes
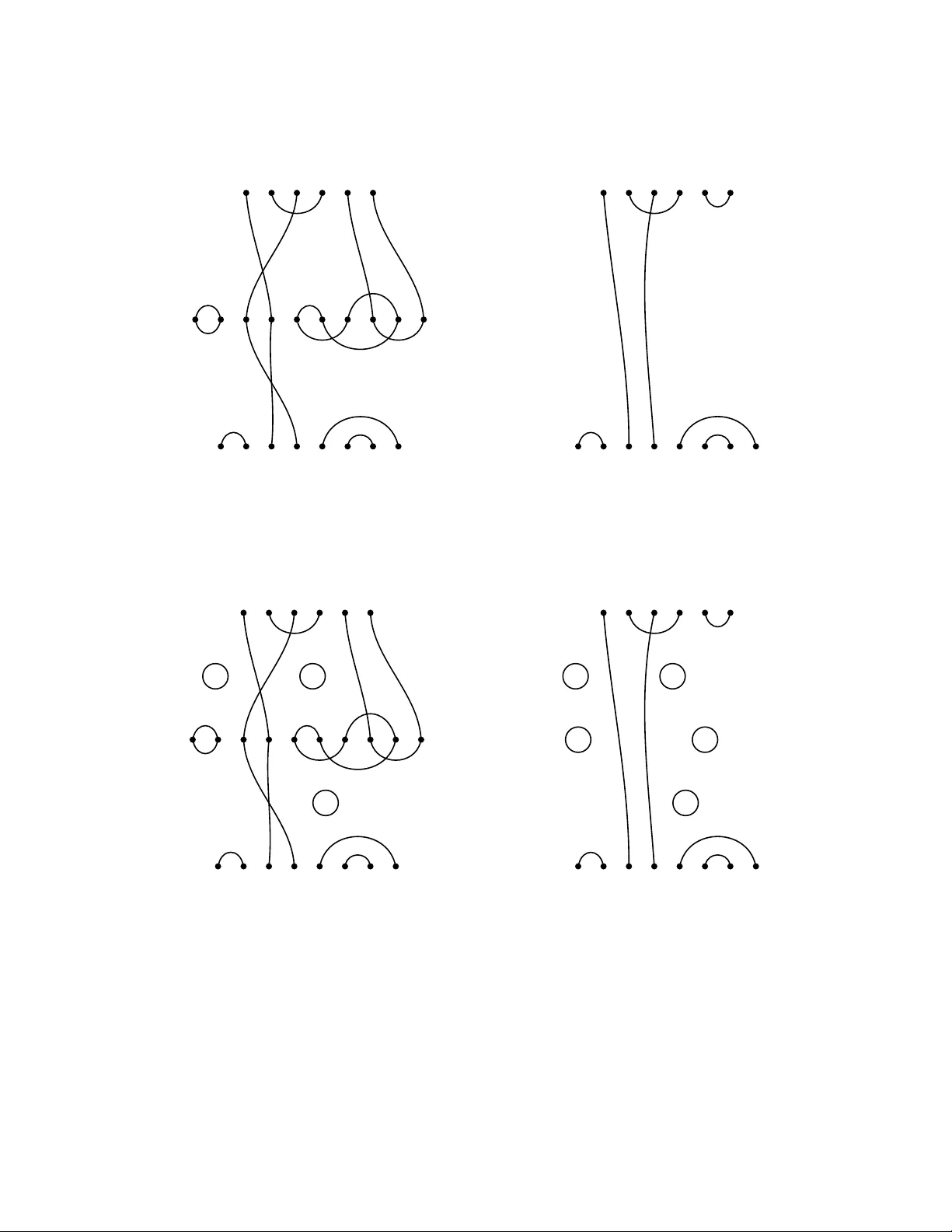
Linking diagrams for free Dominic J. D. Hughes ∗ Stanford University 9 May , 2008 Linking diagrams with path composition are ubiquitous, for ex ample: T emperley-Lieb and Brauer monoids, Kelly-Laplaza graphs for compact closed categories, and Girard’s multiplicative proof nets. W e construct the category Link = Span ( iRel ) , w he re iRel is the category of injec- tive relations (reverse d partial functions) and show that the aforementioned linkings, as we ll as Jones-Martin partition monoids, reside inside Link . P ath composition , including collection of loops, is by pullback. Link contains the free compact closed category on a self-dual object (hence also the looped Bra uer and T emperly-Lie b monoids), and generalises partition monoids with par- tiality (ver tices in no partition) and empty- and infinite partitions. Thus we obtain conventional linking/partition diagr ams and their composition “for fre e”, fr om iRel . 1 Introduction W rite Brau ♭ for the category of loop less Brauer linkings [Bra37]: • Objects X , Y , . . . are finite sets, whose elements we call vertices . • Morphisms. A loopless Brauer link ing X → Y is an equivalence relation o n the disjoint union X + Y whose every class is a pair ( 2 vert ices) . • Composition is path composition: the composite SR : X → Z of R : X → Y and S : Y → Z is the restriction to X + Z of the transitive closure ( R + S ) ∗ of R + S ⊆ X + Y + Z . 1 See F igure 1. The loopless Brauer mono id Br au ♭ n is the subcategory of Brau ♭ on { 1, . . . , n } . 2 W rite Bra u for t he cat e gory of looped Brauer linkings, on th e same o bjects: • Morphisms. A looped Brauer linking X → Y is a pair h k , R i , denote d δ k R , comprising a loopless Brauer linking R : X → Y a loop count k ∈ N = { 0, 1, . . . } . • Compo sition is path composition, collecting loops: ( δ l S ) ( δ k R ) is δ l + k + λ ( SR ) whe r e SR is the composite in Br au ♭ and λ is the number of loops formed during the construction of SR , that is, classes of ( R + S ) ∗ ⊆ X + Y + Z which are entirely with in Y . See Figure 2. The looped Brauer monoid Br au n is the subcategory of Br au on { 1, . . . , n } . 3 The category Brau is (equivalent to) the free compact closed category on a self-dual object [KL80, Abr05]. There is a ∗ Visiting Scholar , Co mputer Science Department, Stanford University , CA 94305, USA. 1 T o avoid clutter we assume here (without loss of general i ty , by renaming ve rtices) that canonical inje ctions Q i → Q 1 + Q 2 are incl u sions. In other words , we assume X , Y and Z are disjo int, and that every + is a union ∪ . 2 I.e. , the mo noid Brau ♭ n is the homset Brau ♭ ( { 1, . . . , n } , { 1, . . . , n } ) , with c ompositio n as multiplica ti on. Although [Bra37] consid ered only monoids , colle cting them into a catego ry is obvious and trivial. 3 Brau n is the submonoi d of the Brauer algebra over n [Bra37] generated (und er multipli cation in the alg ebra) by { δ 0 R : R ∈ Brau ♭ n } and δ 1 i , where i is the id entity in Brau ♭ n . 1 7→ Figure 1: Example of composition in the category Bra u ♭ of loopless Brauer linking s. Each equiva- lence class { x , y } is depicted as a “link” on x and y . 7→ Figure 2: Example of composition in the category Br au of looped Brauer linkings. The two input linkings are δ 2 R (upper) and δ 1 S (lower), where R and S are the loop less linkings in Figure 1. The output linking ( δ 1 S ) ( δ 2 R ) is δ 5 ( SR ) = δ 1 + 2 + 2 ( SR ) , where SR is the output loo p less linking in Figure 1, a composition which forms two new loops. 2 forgetful functor to both Brau and Brau ♭ from the category MLL of unit-free multiplicative proof nets [Gir87], ext racting leaves (literal occurences) and axiom links. 4 The separate treatment o f paths and loops is ad hoc. W e shall unify paths and loops, handling them simultaneously , and in so d o ing, obtain infinite generalisations of linkings. Acknowledgement. Thanks to R obin Houston for feedb ack last summer on the prospect of ex- tending p ullbacks from injective re lations t o coher ence spaces [Gir87] for a “sliced” notion of link- ing, enriched in commutative mo noids. This is work in progress. Many thanks to V aughan Prat t fo r his o ngoing support . 2 Generalised linkings: Link = Span ( iRel ) A binary re lation R : A → Z ( i.e. , R ⊆ A × Z ) is injective if aRz and a ′ Rz implies a = a ′ . 5 W rite iRel for the category of sets and injective r elations betwe en them. Note th at iRel = pFun op , the opposite of the category of sets and p artial functions. A linking X → Y is a diagram X A Y f g in iRel . Each a ∈ A is a link , and the elements of X and Y are vertices . The vertex set f ( a ) + g ( a ) ⊆ X + Y is the footprint of the link a ∈ A . 6 If a vertex x is in the footp rint of a , we simply say that x is in a , or a has/contains x . The injectivity requirement implies that no two links overlap (share a vertex). See Figure 3 for examples. Just as graph th e ory treats graphs up to isomorph ism, we identify linkings up to isomor phism, i.e. , renaming of links. F ormally , we identify linkings X A Y f g and X A ′ Y f ′ g ′ iff th ere exists a bijection θ : A → A ′ such that f ′ θ = f and g ′ θ = g . A X Y A ′ f g f ′ g ′ θ 4 An object of MLL i s a unit-free mul tiplica ti ve formula, a morphism A → B is a cut-free p roof net on A ⊸ B , and compositi on i s by c ut eli mination. See e.g. [HG03, HG05]. The well-defined ness to Brau ♭ is trivial ; the functor to Brau is more subtle, bein g well-defined because proof net c orrectness ensures no loop s aris e during compos ition ( i.e. , λ = 0 in the definition of compositi o n in Brau ). 5 aRz abbreviates h a , z i ∈ R . 6 F or any binary relation R : A → Z , the image R ( a ) is { z ∈ Z : aRz for s ome a ∈ A } ⊆ Z . 3 7→ Figure 3: Examples of linkings and pullback-composition in Link = Span ( iRel ) . A link is shown as a small circle, with its vertices attached b y edges. W e leave the circle implicit when a link has two vertices. 2.1 Composition by pullback The composite X → Z of linkings X A Y f g and Y B Z h k is by pullback in iRel : 7 P A B X Y Z f g h k p q (1) Explicitly , the comp osite linking X P Z fp k q is defined as follows. T o illustrate the defi nition as we pr oceed, we r efer to the Brauer composition in Figure 2. Th e re X/Y/Z are t he upper/mid/lower rows, and A/B are t h e uppe r/lower link set s. A synchronisation h α , β i is a pair of sets of links α ⊆ A and β ⊆ B with th e same footprint in the interface Y : g ( α ) = h ( β ) (2) F o r ex ample, in F igure 2, if α comprises the thre e caps of A , and β the first t hree cups of B , then h α , β i is a synchronisation with f ( α ) = g ( α ) = { y 1 , y 2 , y 5 , y 6 , y 7 , y 9 } ⊆ Y , where the y i are the vertices o f Y from left to right. (Note that this remains a synchronisation upon adding any number of loops t o α and β , since loops have e mpty footpr int in Y .) Hencefor th ident if y a synchronisation h α , β i (and more generally any pair h α , β i of subsets α ⊆ A and β ⊆ B ) with t he corresponding 7 Equivalently , pushout in pFun = iRel op . The use of spans/pullba cks i n this paper , tog e ther with equivalence up to isomorphism, should compared with the standard use of cospans /pushouts for tan gles and cobordisms. 4 subset α + β ⊆ A + B (th us ide nt ifying along the b ijection 8 P ( A ) × P ( B ) ∼ = P ( A + B ) , where P ( C ) denotes the powerset (set of subsets) of C ). A (generalised) path is a minimal non-empty synchronisation, where minimality is with re spect to inclusion. There are 12 paths in Figure 2: seven singl etons (the two loops in A , the loop in B , the cup of A , and the three caps of B ), three doubletons (t he short circuit form e d on { y 1 , y 2 } and the verticals thr ough y 3 and y 4 ), o ne triplet (through y 8 and y 10 ), and one quadruplet (the long circuit thro ugh y 5 , y 6 , y 7 , y 9 ). Define the set P of links of the comp osite X P Z fp k q as t he set o f all paths, and define p : P → A and q : P → B as the project ions p h α , β i = α (3) q h α , β i = β (4) In Figure 2, p (resp. q ) projects each path to its constituent links in the upper half A (re sp. lower half B ). The composite fp : P → X projects a path γ to the vertices (if any) in X which are on γ , and similarly for kq : P → Y . In particular , for each of the five loops L (both the thr ee singl etons from the original linkings, and the t wo f o rmed of multiple links), we h ave fp ( L ) and kq ( L ) emp ty . See F igure 3 for a more general, non-Brauer example. An e xample of an infinite composition is depicted in Figure 4, illustrating why naive infinite generalisations of Brauer linkings do not work: an infinite chain of binary (two-vert ex) links produces a unary (single-vertex) link. A finite variant is in Figure 5. T H E O R E M 1 The construction above defi ne s pullbacks in iRel . Proof . Section 5 . W rite Link f o r the cat e gory of linkings with this composition. In other words, Link = Span ( iRel ) , the span construction [Bén67] applied t o iRel , with bicategorical structure collapsed to a category by taking mo r phisms (1-cells) up to isomorphism. T hat Link is a category ( with identities and associa- tive composition) fo llows fr o m the general features of the Span construction, saving considerable labour . 2.2 Loopless variant Link ♭ A loop is a link without vertices. Define Link ♭ as the variant of Link compr ising the loopless linkings, discarding any loops fo rmed during pullback composition. (Composition is associative since loops do not interact during p ullback.) W rite (−) ♭ : L ink → Link ♭ for the functor which de let e s loops (identity on objects). Note that Link ♭ is not a subcategory of Link , since composition of loopless linkings can generate loops. 3 Subcategories of Link and Link ♭ W e consider various subcategories of Link and Link ♭ , as summarised in Figure 6 and detailed below . The categories Br au and Brau ♭ were defined at the start of Section 1. The categories Part and P art ♭ are the looped and unlooped Jones-Martin partition categories [Jo n94, Mar94] 9 , defined 8 More s uggestiv e ly , 2 A × 2 B ∼ = 2 A + B , writing 2 C for P ( C ) . 9 As with the Brauer c ategory , we have me rely collecte d the monoid s into categ ories in the obv ious way . 5 . . . 7→ Figure 4: Example of th e pullback-composition of infinite linkings in Link = Span ( iRel ) , with in- terface layer Y = { 1, 2, . . . } . T he e nt ir e ty of Y is a synchronisation, and since it is minimal and non-empty , it is a path. Thus it shows up in the r e sult of composition on the r ight, as a unary link (with a sing le vertex). This shows clearly why naive infinite gener alisations o f Brauer linki ngs do not work: an infinite chain of binary (two-verte x ) links has produced a unary link. F igure 5 shows a corr e sponding example in which the inter face layer is finite. 7→ Figure 5: Analogous composition to Figure 4 in which t he interface layer Y = { 1, . . . , 7 } is finite. This time there is no non-empt y synchronisation touching Y , so no link results f rom the interaction there. (Note that the lower-left input linking is not a Brauer linking, since it is p artial: verte x 7 is in no link.) 6 ( N , +) ⊆ TLieb ⊆ Brau ⊆ P art ⊆ Link TLieb ♭ ⊆ Br au ♭ ⊆ P art ♭ ⊆ Link ♭ ♭ ♭ ♭ ♭ Object restriction Morphism restriction loopless finite total binary planar Link P art finite X X Brau finite X X X TLieb {1,. . . ,n} X X X X ( N , +) empty X ( X ) ( X ) ( X ) Link ♭ X P art ♭ finite X ( X ) X Brau ♭ finite X ( X ) X X TLieb ♭ {1,. . . ,n} X ( X ) X X X Figure 6: V arious subcategories of Link and its loopless variant Link ♭ . T ota l means every vertex is in a link. Binary means every non-loop has exactly two vertices. The ( X ) are implied X . Her e ( N , +) is the monoid o f integers under addition, which is the subcategory o f Link on t he empty set. The functor (−) ♭ deletes all loops. The categories Part ♭ , Bra u ♭ and TLieb ♭ contain the standard (loopless) Jones-Martin part ition-, Brauer- and T emperley-Lieb monoids, respectively . 7 exactly as Brau and Brau ♭ (verbatim), but dropping the restriction that every equivalence class is a pair . The co nvent ional (loopless) part ition monoid o n n is the subcategory Part ♭ n of Part ♭ on { 1, . . . , n } . The T emperley -Lieb category TLieb [TL71] 10 is th e subcategory of Br au on ob jects of the form { 1, . . . , n } fo r n > 0, and with only the planar 11 linkings (no cr ossings of links, i.e. , well- bracketed or “pare nthetical” [K au04, p. 63]). See [Abr07] fo r a co ncr e te presentat ion. The category TLieb ♭ is the loopless variant of TLieb . T he standard loopless T emperley-Lieb monoids are the subcategories of TLieb ♭ on the objects { 1, . . . , n } . Planar partition monoids can be defined by analogy with T emperley-Lieb monoids. F or a nice exposition of each of the aforementioned monoids (and their algebras), with many diagrams and examples, see [HR05]. 4 Geometry of interactio n “for fr ee” Let M LL denote the category of multiplicative proof nets [Gir87], with unit-free formulas as objects, a morphism X → Y as a cut-fre e proof net on X ⊸ Y , and composition by cut elimination. Thus a pro of net is a linking on leaves ( literal occurrences) which satisfies a correctness criterion, and composition is path composition. 12 The f o rgetful functor L ♭ : MLL → Brau ♭ extracts t h e leaves (forgetting the underlyin g parse tree structure of the formulas) and the links between them. Due to the correctness criterion on p r oof nets, loop s never arise during composition, t hus there is also a forgetful functor L : MLL → Brau , and the following diagram commutes. MLL Brau ⊆ Link Brau ♭ ⊆ Link ♭ L L ♭ ♭ ♭ Having composed the linkings of proof nets A ⊸ B and B ⊸ C in Link by iRel pullback, we can draw the resulting linking on A ⊸ C , to obtain the composite in MLL . Thus all computation happens inside Link , so we have geometr y of interaction [Gir89] “for f ree”, via iRel . W ork in pro gre ss aims to use pullbacks of coher e nce spaces [Gir87], an ex t ension of iRel , to obtain a multiplicative-additive geome try o f interaction “for free ”. 5 Proof of Theore m 1 A binary relation R : A → Z is total if the image R ( a ) ⊆ Z is non-empty f or all a ∈ A . L E M M A 1 An iRel morphism is monic 13 iff it is total. 14 Proof . Suppose m : A → Z is total. Let f , g : W → A with mf = mg . If f 6 = g there exist w ∈ W and a ∈ A with w f a but not w g a (exchanging f and g , if necessary). Since m is total, there exists 10 See footnote 9. 11 W e assu me vertices 1, . . . , n are ordered in the plane. 12 See e.g. [HG03, HG05]. 13 Recall that a morphism m : A → Z i s monic if mf = mg impli es f = g for a ll objec ts W and f , g : W → A [Mac71]. 14 Dually , a n d perhaps more intuitively obvious, a partial function i s epic (in pFun ) iff i t is surjective. 8 z ∈ Z with a m z . Thus w ( mf ) z , so w ( mg ) z , he nce there e x ists a ′ ∈ A with w g a ′ m z . Since not w g a , we have a ′ 6 = a , but then a m z and a ′ m z contradicting injectivity . Th us f = g , so m is mo nic. Conversely , suppose m : A → Z is not total. Then th e re ex ists a ∈ A such that m ( a ) = ∅ . Let W = { w } , f ( w ) = ∅ and g ( w ) = { a } . Then mf = mg (both empty) yet f 6 = g , so m is not monic. L E M M A 2 ( S T A B I L I T Y ) Injective relations preserve unions and intersections: fo r any R : A → Z in iRel and subsets α i ⊆ A for each i in some indexing set I , R [ i ∈ I α i ! = [ i ∈ i R ( α i ) (5) R \ i ∈ I α i ! = \ i ∈ i R ( α i ) (6) Proof . (5). A trivial pr o perty of binary re lations (injectivity not r e quired). 15 (6). Suppose z ∈ R ( T α i ) , i.e. , a Rz f o r some a ∈ T α i . Then a ∈ α i for all i , hence z ∈ R ( α i ) for all i , so z ∈ T R ( α i ) . Conversely , suppo se z ∈ T R ( α i ) , i.e. , z ∈ R ( α i ) for all i . Then for each i ∈ I there exists a i ∈ α i ⊆ A with a i Rz . By injectivity , a i = a j = a for all i , j ∈ I , he nce a ∈ T α i . Thus z ∈ R ( T α i ) , since aRz . W rite α ⊎ β f or α ∪ β when α ∩ β = ∅ , and mo re generally , write U i ∈ I α i for S i ∈ I α i when α i ∩ α j = ∅ for all distinct i , j ∈ I . C O R O L L A RY 1 Injective relations pre serve disjoint unions: with R as in the pr evious lemma, R ] i ∈ I α i ! = ] i ∈ i R ( α i ) (7) Proof . Immediate from (5) and (6). C O R O L L A RY 2 Injective re lations pr eserve inclusion and subtraction: if R : A → Z in iRel and α , β ⊆ A then 16 α ⊆ β = ⇒ R ( α ) ⊆ R ( β ) (8) R ( α \ β ) = R ( α ) \ R ( β ) (9) Proof . (8) is trivial (for any binary relation), and (9) is immediate fr om the proper t ies above: R ( α ) = R ( α \ β ) ⊎ ( α ∩ β ) ( 6 , 7 ) = R ( α \ β ) ⊎ R ( α ) ∩ R ( β ) (10) hence R ( α \ β ) = R ( α ) \ R ( α ) ∩ R ( β ) = R ( α ) \ R ( β ) 15 b ∈ R ( S α i ) iff ∃ a ∈ S α i . aRb iff ∃ i ∈ I , a ∈ α i . aRz iff ∃ i ∈ I . z ∈ R ( α i ) iff z ∈ S R ( α i ) . 16 α \ β = { a ∈ α : a 6∈ β } . 9 R efer once again to the diagram (1). Recall that we identify a a pair h α , β i of subsets α ⊆ A and β ⊆ B with α + β ⊆ A + B . Intersection, union and inclusi on of synchronisations are defi ned via t h is identification. W r it e h ( h α , β i ) = h ( α ) and g ( h α , β i ) = g ( β ) . Thus σ ⊆ A + B is a synchronisation iff h ( σ ) = g ( σ ) (11) L E M M A 3 Synchronisations are closed under union, intersection and subtraction: (a) if S is a set of synchronisations then T S and S S are synchronisations; (b) if σ and τ are synchronisations then σ \ τ is a synchronisation. Proof . g \ S (6) = \ σ ∈ S g ( σ ) (11) = \ σ ∈ S h ( σ ) (6) = h \ S The S and subtraction cases are analogous, via (5) and (9). L E M M A 4 Distinct p at hs are disjoint: if γ , γ ′ ∈ P then γ 6 = γ ′ = ⇒ γ ∩ γ ′ = ∅ (12) Proof . γ ∩ γ ′ is a synchronisation by intersect ion-closure (Lemma 3). If γ 6 = γ ′ and γ ∩ γ ′ 6 = ∅ then γ ∩ γ ′ is a synchronisation strictly smaller than at least one of γ or γ ′ , contradicting minimality . L E M M A 5 ( D E C O M P O S I T I O N ) Every synchronisation σ is the disjoint union of its paths: σ = ] γ ⊆ σ : γ is a pat h (13) Proof . P ath s are disjoint by t he previous lemma, so it remains to show that every link c ∈ σ is in some (nece ssarily uniq ue) path γ c . ( Automatically γ c ⊆ σ , b y minimality with r e spect to γ c ∩ σ .) Define γ c = \ τ : τ is a synchronisation and c ∈ τ , (14) a synchronisation by intersection-closure (Lemma 3) and non-empty since it contains σ . W e must show that γ c is minimal among all non-empty synchronisations (not merely among t hose containing c ). Suppose µ ( τ is a non-empty synchronisation. Let µ = τ \ µ , a synchronisation by subtr action- closure (Lemma 3) . Then one o f µ and µ is a synchronisation co ntaining c wh ich is strictly smaller than γ c , a contradiction. Proof o f Theorem 1. The square (1) commutes: g ( p h α , β i ) (3) = g ( α ) (2) = h ( β ) (4) = h ( q h α , β i ) . 10 Suppose A P ′ B p ′ q ′ yields an analogous co mmuting square: gp ′ = hq ′ . P ′ P A B Y g h p q p ′ q ′ u F o r d ∈ P ′ let σ ( d ) = p ′ ( d ) + q ′ ( d ) ⊆ A + B (15) which is a synchronisation since gp ′ = hq ′ . Define u : P ′ → P by taking u ( d ) as the set of all paths within σ ( d ) : u ( d ) = { γ ∈ P : γ ⊆ σ ( d ) } (16) Claim: u is injectiv e. If u ( d ) ∩ u ( e ) 6 = ∅ there exists a path γ such that γ ⊆ σ ( d ) ∩ σ ( e ) , say γ = α + β with α ⊆ A and β ⊆ B . Hence α ⊆ p ′ ( d ) ∩ p ′ ( e ) and β ⊆ q ′ ( d ) ∩ q ′ ( e ) . Since γ is a path, it is non-empty , so α or β is non-empty , say α . Thus d = e by injectivity of p ′ . Claim: pu = p ′ and qu = q ′ . Suppose a ∈ p ′ ( d ) . Let γ be the unique pat h such that a ∈ γ and γ ⊆ σ ( d ) , e xisting by Lemma 5. T hen γ ∈ u ( d ) (by (16)) and a ∈ p ( γ ) (since a ∈ A and p pro jects subsets of A + B to subsets of A ), hence a ∈ p ( u ( d )) , so p ′ ⊆ pu . Conversely , suppose a ∈ p ( u ( d )) , i.e. , ther e exists γ ∈ P such that a ∈ p ( γ ) and γ ∈ u ( d ) . By (16) we have γ ⊆ σ ( d ) , so a ∈ p ( σ ( d )) , by (8). Since p ( σ ( d ) ) = p ′ ( d ) ( because p projects) we have a ∈ p ′ ( d ) . Hence pu ⊆ p ′ . Since p ′ ⊆ pu and pu ⊆ p , we have p ′ = pu , whence q ′ = qu , by symmetr y . Finally , we must prove that u is unique, i.e. , the commuting triangles pu = p ′ and qu = q ′ determine u . Let ˆ u : P ′ → P . Given r : A → M and s : A → N write [ r , s ] for the corresponding injective r elation A → M + N . Thus p ′ = p ˆ u and q ′ = q ˆ u iff [ p , q ] ˆ u = [ p ′ , q ′ ] ˆ u . P aths are non-empty , so [ p , q ] is total, hence monic (Lemma 1 ). Ther efore [ p , q ] ˆ u = [ p , q ] u implies ˆ u = u . R eferen ces [Abr05] Abramsky , S. Abstract scalars , loops, and free traced and stro ngly compact closed categories . In Proc. CALCO’05 , volume 3 629 of Lec. Notes in Comp. Sci. , pp. 1–31. Springer , 2005. [Abr07] . T emperl e y-lieb algebra: from kno t theor y to logic and computation via quantum mechanics . In Proc. Mathematics of Quantum Computing and T echnolo gy ’05 , pp. 515–558. T ayler and Fra ncis, 2007. [Bén67] Bénabo u, J. Intr o duction to bica tegories . In Reports o f the Midwest Catego r y Se minar , volume 47 of Lecture Notes in Mathematics , pp. 1–77. Springer- V e rlag, 1967 . [Bra37] Brau er , R. On algebras which are con n ected with the semisimpl e continuous groups . Annals of Math., 38:857 –872, 193 7. [Gir87] Girard, J.- Y . Linear logic . Theoretical Computer S cience, 50:1–102, 19 87. 11 [Gir89] . T owards a geo metry o f inte raction . In Categories in Computer Science and Logic , volu me 9 2 of Contemporary Mathematics , pp. 69–10 8, 19 89. Proc. of June ’87 meeting in Boulder , Colorado. [HG03] Hughes, D. J. D. & R. J. v . Glabbeek. Proof ne ts for unit-fr e e multiplicative additive linear logic (Ex- tended abstract) . In Proc. LICS’03 , pp. 1–10. IEEE, 2003 . [HG05] . Proof nets for unit-free m ul tiplicative-additive linear logic . ACM T r ansactions on Computa- tional Logic (TOCL), 6:784–842, October 2005. Invited submission Nov . 2003, re vised Jan. 2005, full version of [HG03]. [HR05] Halverson, T. & A. Ram. P artition alg e bras . Eur opean J. Combinatorics, 26:869–92 1, 2 005. [Jon94] Jones, V . F . R. The potts model and the symmet r ic gro up . In Proc. T aniguchi Symposium on Operato r Algebras (K yuzeso ’9 3) , pp. 25 9–267, River Edge, NJ, 1994. W orld Sci. Pub. [Kau04] Kauffman, L. H. Knot diagrammatics . arXiv:math/0410329 v5 , 2004. [KL80] Kelly , G. M . & M. L. Laplaza. Coherence for compact close d categories . J. Pure Appl. A lge bra, 1 9:193 – 213, 1980. [Mac71] Mac Lane, S. Categories for the W orking Mathe m atician . Springer- V erlag, 197 1. [Mar94] Martin, P . T emp erley-Lieb algeb r as for nonpl anar st atistical mechanics — the partition algebra con - struction . J. Knot Theory Ramifications, 3 :51–82, 19 94. [TL71] T e mperley , N. & E. Lieb. Relations between the percolation and colouring problem and o ther graph- theoretical pro blems associated with regular pl anar lattices: so me exact re sults for the percolation prob - lem . In Proc. Royal Society Series A , v olu me 3 22, pp. 251 –280, 1971 . 12
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment