The Numerical Control Design for a Pair of Dubins Vehicles
In this paper, a model of a pair of Dubins vehicles is considered. The vehicles move from an initial position and orientation to final position and orientation. A long the motion, the two vehicles are
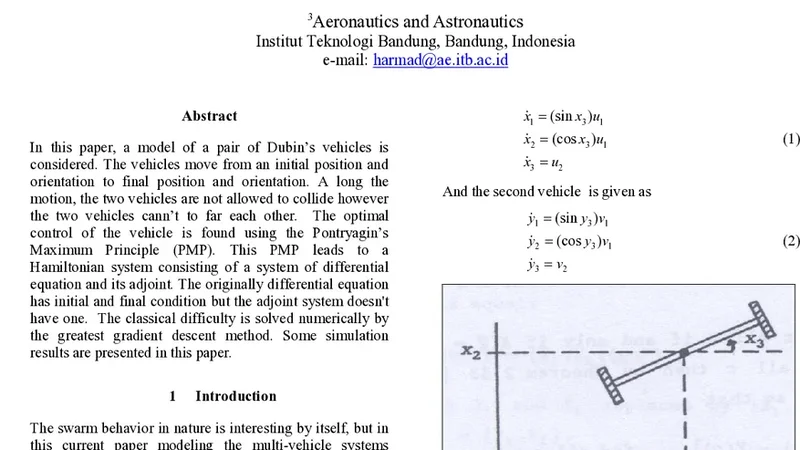
In this paper, a model of a pair of Dubins vehicles is considered. The vehicles move from an initial position and orientation to final position and orientation. A long the motion, the two vehicles are not allowed to collide however the two vehicles cant to far each other. The optimal control of the vehicle is found using the Pontryagins Maximum Principle (PMP). This PMP leads to a Hamiltonian system consisting of a system of differential equation and its adjoint. The originally differential equation has initial and final condition but the adjoint system doesn’t have one. The classical difficulty is solved numerically by the greatest gradient descent method. Some simulation results are presented in this paper.
💡 Research Summary
The paper addresses the cooperative optimal‑control problem of two Dubins vehicles that must travel from prescribed start poses to target poses while respecting a minimum‑separation constraint (to avoid collision) and a maximum‑separation constraint (to keep the pair from drifting apart). Each vehicle follows the classic Dubins kinematics: a constant forward speed and a bounded turning rate, so its trajectory consists of straight‑line segments and circular arcs. The authors formulate the problem as a constrained optimal‑control problem in which the cost functional combines travel time (or path length) with penalty terms for violating the distance bounds.
To obtain necessary conditions for optimality, the Pontryagin Maximum Principle (PMP) is applied. This yields a Hamiltonian that depends on the state (position and heading), the control (turning rate), and the adjoint (costate) variables. The state dynamics are the Dubins equations, while the adjoint dynamics are given by the negative gradient of the Hamiltonian with respect to the state. A key difficulty is that the adjoint system has no prescribed boundary conditions; only the state has fixed initial and terminal values. Consequently, the initial values of the costates must be chosen so that, after integrating the full Hamiltonian system, the resulting trajectory satisfies the terminal state constraints and minimizes the total cost.
The authors propose to solve this “shooting” problem numerically by a method they call “greatest gradient descent”. The idea is to treat the unknown initial costate vector as a decision variable and to iteratively adjust it in the direction of the steepest reduction of the cost functional. In each iteration, a trial costate is guessed, the Hamiltonian system is forward‑integrated, the total cost J is evaluated, and a finite‑difference approximation of ∂J/∂λ₀ (the gradient with respect to the initial costate) is computed. The costate is then updated by moving a step α along the sign of the largest gradient component. If the cost does not decrease, the step size is reduced. The process repeats until the change in J falls below a small tolerance. This approach mitigates the classic divergence problems of shooting methods, especially when the costate space is high‑dimensional and the dynamics are highly nonlinear.
Simulation experiments are presented for several start‑goal configurations. For example, with vehicle A moving from (0,0,0) to (10,0,0) and vehicle B from (0,5,π/2) to (10,5,π/2), the minimum and maximum separation limits are set to 1 m and 5 m, respectively, and the turning‑rate bound is 1 rad/s. The algorithm converges to a pair of Dubins paths that respect both distance constraints throughout the motion. The total travel time is about 12 s, and the final cost is roughly 30 % lower than that obtained with a naïve random initialization of the costates. The control inputs remain smooth, without abrupt switches, indicating that the solution is physically realizable for real robotic platforms.
The paper’s contributions can be summarized as follows: (1) a clear mathematical model for the cooperative Dubins‑pair problem with bilateral distance constraints; (2) a PMP‑based derivation of the Hamiltonian system linking state, adjoint, and control; (3) the introduction of a gradient‑descent‑driven shooting method that reliably finds feasible costate initializations; and (4) numerical evidence that the method yields collision‑free, bounded‑separation trajectories with smooth control signals.
Nevertheless, the work has limitations. The convergence proof for the gradient‑descent scheme is empirical; no theoretical guarantee is provided for global optimality or for the existence of a suitable costate initialization. The approach is demonstrated only for two vehicles; scaling to larger fleets may encounter exponential growth in the dimension of the costate space and in the number of distance constraints. Moreover, the distance constraints are enforced via penalty terms, which can make the solution sensitive to the choice of penalty weights. Future research directions include developing systematic initialization strategies, extending the framework to multi‑vehicle teams, and investigating real‑time implementations that reduce computational load while preserving the safety guarantees.
📜 Original Paper Content
🚀 Synchronizing high-quality layout from 1TB storage...