Network protocol scalability via a topological Kadanoff transformation
A natural hierarchical framework for network topology abstraction is presented based on an analogy with the Kadanoff transformation and renormalisation group in theoretical physics. Some properties of the renormalisation group bear similarities to th…
Authors: C. C. Constantinou, A. S. Stepanenko
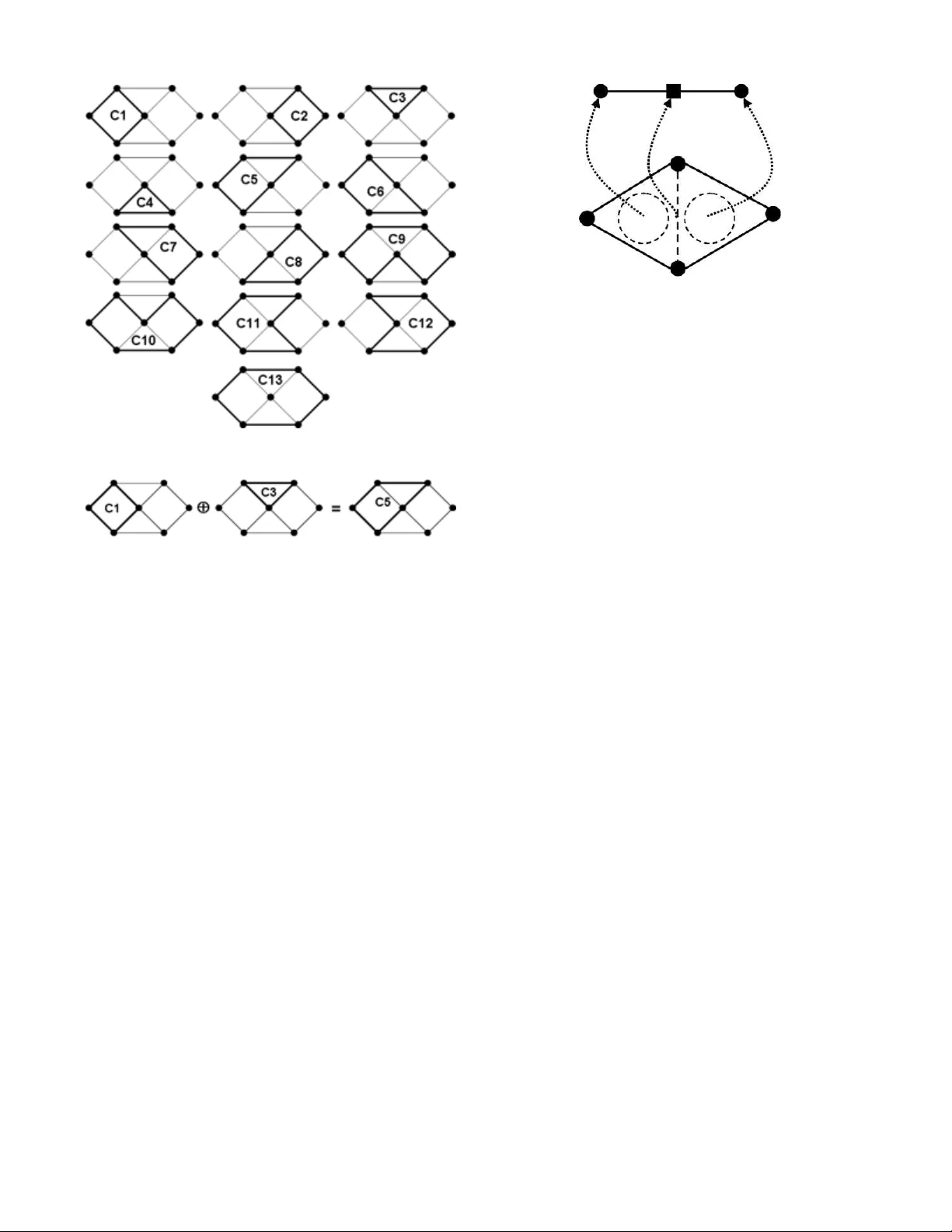
Netw ork protocol scalabil ity via a topological Kadanof f transformat ion (In vited P aper) Costas Constantinou, and Alexander Stepanen ko Abstract —A natural hierarchical framewo rk for network topology abstraction is pr esented based on an analogy with the Kadanoff transfo rmation and renormalisation gr oup in theoret- ical physics. Some p roperties of the renormalisation group bear similarities to t he scalabilit y p roperties of network routing p roto- cols (interactions). Central to our abstraction are t wo inti mately connected and complementary path diversity units: simple cycles, and cycle adjacencies. A recursiv e network abstraction procedure is presented, together with an ass ociated generic rec ursive r outing protocol family that offers many desirable features. Index T er ms —Routing, topology , protoc ols. I . I N T R O D U C T I O N The notion o f rou ting pro tocol scalability is familiar to all researchers in the field of commu nication n etworks. S calability is a desirable prope rty of a network, b ut is hard to define rigoro usly . A rou ter , or even a n etwork whose perfor mance improves after addin g h ardware (mem ory , switching capacity , bandwidth , e tc.), monotonica lly with the added capacity , is usually referred to a s a scalab le system. An algorith m, or networking p rotoco l, is said to scale if it is suitably efficient and practical wh en ap plied to a large nu mber of participatin g nodes in the case of a d istributed system. In the con text of distributed network ro uting pr otocols, scalability ad dresses the man ner in which th e following g row as the size of the n etwork in creases: • the co mmunicatio n & c ontrol overhead bandwid th con- sumption in collecting , pr ocessing and disseminating in- formation on which to base f orwarding d ecisions, • the comp utational comp lexity (and associated p rocessing time at each nod e) in mak ing forwardin g decisions, and • the address space and associated size of ro uting tables How well we can perfo rm the above tasks de pends on both how efficiently we can en code all the n etwork paths, as well how efficiently we c an select a specific subset from this multiplicity . In th eoretical p hysics, reno rmalisation group refers to a mathematical tech nique which uses a n atural hierar chy of scales of interactions between increasingly larger coar se- grained “blocks” governin g the system pr operties at each scale. Blocks at every le vel are con structed from blocks at th e next finer-grained level below . The class o f in teractions between such bloc ks ame nable to a reno rmalisation grou p treatment is such that th e effecti ve inter action ty pe between blocks is pr eserved at all levels of coarse- graining . For example, in studyin g magn etism th e block s in q uestion are mag netic domains and the interactio n is the dip ole interac tion between them. One can consider blocks of su ch d omains and then blocks of block s, and so on. T he interactio n between such coarse-gr ained blo cks is of th e same type (i.e. a d ipole on e) as at the microscop ic level. The above hierarch y of scales is the key ide a wh ich enables us to achieve a “scalable” (or efficient) descr iption framework for a system. I t has be en long r ecognised [1] that h ierarchical topolog y ab straction and summarisation are significant in ensuring the scalability of ro uting pro tocols in co mmun ica- tion networks, but on ly c oncern ing the compactn ess of th e addressing scheme employed. This p aper, introduc es a natural h ierar chy of topological scales and th en uses the r enormalisation group as an inspira- tion to construct topologica l objects and interaction s between them in such a mann er as to preserve the ty pe o f in teraction at all levels in the topolo gical hie rarchy . At th e m ost basic level, the atomic topolog ical o bjects are vertices (node s) in a g raph-th eoretic representation of a network and atomic interactions are edg es (link s) be tween vertices. Th e reno rmalisation g roup allows us to describe the in teraction between distant parts of the system thro ugh knowledge of the correspo nding interaction at the micro - lev el. In our case, we are attempting to d escribe con nectivity between distant parts of a network thr ough k nowledge of progr essi vely local conn ectivity down all the levels of the topolog ical hierarch y , includin g the microsco pic level. This hierarchy c an be used for many purpo ses, includin g aug ment- ing it with routin g p rotocol r ules, thus introdu cing a n ew class of rou ting pro tocols that have desirab le scalability pro perties built-in by co nstruction . I I . F U N DA M E N TA L T O P O L O G I C A L U N I T S O F P A T H D I V E R S I T Y As we intend to build a framework cap able of describing network conne ctivity in fu ll, i.e. network path diversity , we begin with a discussion o f fundame ntal top ological units that intrinsically embo dy a no tion o f the latter . The simplest and smallest diversity topological unit is a cycle of nodes, as it affords two disjoint p ath ch oices to g o from any no de in the cycle to any other nod e in the same cycle. All paths in a n etwork either lie on a part of the network which is a tree ( no diversity) or can be expr essed as a n arc on some cycle (the m ost gen eral end-to- end p ath can be a concatenatio n of the above two types of path, but this d oes not alter the ensuing discussion). Fig. 1. The simple cycles of an example network, exhau sti vely enumerate d. Fig. 2. Cycle algebra. As ca n be seen in the examp le of Figur e 1, ev en a small, simple network grap h can be d ecompo sed into a fair n umber of cycles. However , no t all 13 cycles in th is examp le ar e necessary to d escribe the graph f ully . The size of th e cycle space of a network of n vertices an d m edge s can becom e very large ind eed, but this is no t sig nificant: A sma ll subset of indepen dent c ycles can suffice in describing the cycle structure of a network . The no tion of indepen dence is intrin sically re - lated to th at of a linear vector space o f cycles and necessitates the definition of an o perator to comb ine cycles: The req uired operator is th at of the symmetric difference between two c ycles (this is the Boolean XOR oper ation on their edg es), as can b e seen in Figu re 2 . Th e maximal set of linearly independ ent cycles re quired to gen erate all the r emaining cycles form s a basis set and the size, ν , of th e cycle basis set o f a n etwork is giv en b y the elementar y graph- theoretic result, ν = m − n + c where c is the nu mber of conn ected network compo nents. Th e cycle basis set of a network is no t un ique and under standing the classes of cycle basis sets is curren tly th e subject of intense research interest in the discrete mathe matics community [2]. For exam ple, the minim al cycle basis selects cycles th at minimise the overall weight of the edges comprising the basis cycles. T he comp utational co mplexity o f finding the min imal cycle basis of a g raph of n vertices and m edges is poly nomial ( O ( nm 3 ) ) fo r th e simplest algor ithm kn own [3], but faster versions exist (e.g. O ( m 3 + mn 2 log n ) [4]). The simple cycles in the basis set for a network can th en be considered to be o ne of th e fu ndamen tal units of p ath diversity Fig. 3. Abstracti on of cycle s and cyc le adjacen cies into the two types of element ary units of div ersity . in a network. The sym metric d ifference op erator that enables us to comb ine cycles in the b asis set in o rder to generate a ny other cycle yields a clue as to what is the second f undam ental unit of path d iv ersity: The Boolean AND op erator between the edges of any two cycles in the b asis set is eith er the nu ll set of edges, or at least o ne edg e (with its incide nt pair of vertices) an d c an b e also seen to be a unit of diverse connection between cycles , distinct fro m the cycles themselves (note that a single vertex as an inter section between cycles is not a un it of path diversity ). W e shall h encefor th refer to cycles as units of path diversity of typ e 1 and the di verse connections between cycles as un its of pa th div ersity of ty pe 2. These two units are to replace the vertices and edg es as the elemen tary objects comprising a network, if we are to build graph- theoretical constructs that are capab le of sup porting adap tiv e ro uting. More importantly , un its of path diversity o f typ e 1 can b e though t of as blo cks (Kad anoff transfo rmation) , whereas units of p ath d iv ersity o f typ e 2 ca n be thou ght of as in teractions between the forme r . I I I . L O G I C A L N E T W O R K A B R I D G M E N T P RO C E D U R E W e can now c onstruct a h ierarchy of network abstraction graphs starting with the actual/p hysical n etwork u nder con sid- eration, as f ollows: At any level in the abstrac tion determ ine a cycle basis, accordin g to some additio nal criteria suited to the ap plication. Abstract all cycles in the basis as vertices of type 1 and all diverse cycle adjacencies as vertices of typ e 2 at the n ext level. Join vertices of ty pe 1 to th ose vertices of type 2 wh ich sh are at lea st 1 ed ge to fo rm a bi- partite g raph at the next lev el of abstraction , as can be seen in Figure 3. The process th en r epeats L times u ntil a cycle-fr ee grap h is arrived at, as in the example of Figu re 4. W e call th e hierarch ical ensemble of graphs th e logical network abridgment ( LN A) of the network [5]. W e en umerate the le vels of abstraction 0 , 1 , . . . , L for ease of referen ce. Some r emarks need to be made concernin g g raphs which contain trees as sub -graph s, cut vertices and cut e dges. When a tree is attached to a cycle, we can collapse it logically in to its vertex that is rooted in some c ycle. Thus, trees do n ot appear in the g raph of the next higher lev el. For the pur poses of routing this sim ply signifies the fact that the vertex of the tree roo ted Fig. 4. The LNA of a simple network with a disjoint higher le vel . in the cycle has the uniq ue position of bein g r esponsible for forwarding data to all the destinatio n vertices in the tree. A network graph with a cut vertex or a cu t edge become s disjoint at the n ext level o f L N A abstrac tion. Th is den otes th e absence of div erse connectivity between vertices on eithe r side of the cut vertex/edge at the lower le vel. Therefore, routing can only take place at the lower level of the L N A abstraction and the routin g decision in this in stance is u nique, as it inv olves a deterministic fo rwarding decision at the cu t vertex or vertices incident on the cut edge. It is of interest to point out that the cycle bases on either side o f a cut vertex/edge decou ple into two independ ent sub-spa ces. Both th e numb er of levels of abstractio n L , as well as the structure of the graph at each lev el of abstraction , contain informa tion o n how div ersely connec ted a network is. E v- ery level of ab straction conveys summar ised path d iv ersity informa tion f or th e lower level, which can aid both the visualisation an d analy sis of this diversity . The summarisation is not done on an arbitrar y clusterin g b asis, but is dictated by the und erlying network topolog y and introdu ces a natural measure for the n etwork div ersity , L . Clearly , the bigger L , th e more intrinsic path diversity exists in a n etwork. If the graph at any level of abstraction beco mes disco nnected, this ind icates the existence o f a p ath diversity bottleneck at the lower levels . An examp le of the application of the LN A procedu re to a graph illustrating the above po int is shown in Figu re 4. The con vergence properties of the LNA are fairly well- understoo d, but w ill n ot be discussed her e. At one extrem e, for a conne cted n etwork whose g raph is a tree ( m = n − 1 , c = 1 ), L = 0 . At the o ther extrem e, for a completely connected network o f n no des (co mplete graph K n ) having m = n ( n − 1) / 2 edges ( c = 1 ), it can be shown that L = n − 2 . Defin ing the path d iv ersity d ensity of a network to be D ≡ L/n , we can see that 0 ≤ D ≤ 1 − 2 /n < 1 . The path diversity d ensity of a network can be used to determine the ap propr iateness o f the cho ice of a ro uting technolog y to the specific topolo gy of the network in q uestion. If D ≃ 0 , the network top ology is do minated by tr ees and a protocol that comp utes sho rtest p aths to each de stination will be both highly scalable and efficient. In contrast, if D . 1 , th e n etwork topo logy is close to b eing co mpletely connected and no “intelligence” is necessary in the routing technolog y: W ith a high d egree of pr obability the destination vertex will be directly conn ected to th e source vertex; if not, choosing a rand om adjacent vertex also has a h igh p robability of this being direc tly c onnected to the destination vertex. As a con sequence, rando m deflectio n routing will d eliv er the d ata to its destination with a proba bility that app roaches unity exponen tially fast in th e num ber of h ops req uired for successful deliv ery . In th is instance rand om de flection routing is scalable, robust and sufficient. The in termediate D case ( 0 < D ≪ 1 ) is mor e pr oblematic. A shortest path ro uting protoco l fails to exploit the un derlying network diversity and will take time to re-co n verge if co nges- tion or failures arise. Rando m deflection rou ting is u nlikely to deliv er data successfully to its destination, as nodes are likely to be separated by many h ops (in fact the p robab ility of successful deliv ery becom es expo nentially small in the number of hop s along the shor test path tree that separates the sourc e and destination vertices). Theref ore, in order to exploit the under lying network diversity a dy namic, ad aptive routing protocol is required . As we shall see shortly , the na tural framework on which to base the creation of su ch a p rotocol is the LNA itself. I V . R E S I L I E N T R E C U R S I V E R O U T I N G The LN A can b e au gmented with a numbe r of forwardin g rules to cre ate a r esilient recursive routin g (R 3 ) protoco l. A routing algorithm cap able of opera ting efficiently in the inter- mediate D case m ust exploit the LN A an d ope rate recursively at each level of abstraction of the n etwork, either to route a p acket ar ound a single cycle, o r along a tr ee. Routin g informa tion o n a tree is a trivial exercise, in the sense that all fo rwarding decisions are d eterministic and we shall n ot discuss this any fu rther . Th e fund amental gene ric algorithm must route a p acket fro m a sour ce to a destination , bo th o f which are m embers of the same level 1 lo gical nod e and thu s are m embers of the same cycle at lev el 0 (her eafter referred to as level 0 n eighbou rs). The algor ithm must b e capable o f (i) loop-fr ee data ro uting acro ss the cycle, ( ii) load balancing across the cycle and (iii) fast reaction to link or node failures in the level 0 cycle of nodes. If the source and destination are m embers of the same level 2 log ical no de ( i.e. they belong to the same level 1 cycle and are thus level 1 neighbou rs), the fundamenta l routing algorithm should be applied iteratively twice, once at level 1 an d once at the current (local) level 0 cycle. For source and destination nod es that are level ℓ n eighbo urs, the fund amental ro uting algor ithm need s to be a pplied ℓ + 1 times iterati vely , from the curren t high est level ℓ down to the local le vel 0 cycle, as illustrated by Figure 5. If a t some level of abstraction ℓ ′ the L N A gr aph of the network is disjoint (in Figure 4 fo r example ℓ ′ = 2 ), the fundam ental routing algo rithm can not find a level 1 cycle or Fig. 5. Resilient Recursi ve Routing. tree across som e sou rce and destina tion pairs. In this case, the alg orithm m ust drop down to level ℓ ′ − 1 , where at least one cut- node (as shown in Figure 4) n eeds to be trav ersed deterministically at the ℓ ′ − 1 level of ab straction, ju st as routing on a tre e need s to op erate. This implies that cu t- nodes need to exchang e reac hability info rmation abo ut their correspo nding bi-co nnected p arts of the network. The routing methodology embodied in the gen eric a lgorithm must enable us to rou te a packet in a loop- free m anner, while p erform ing load balan cing and enabling failure recovery across th e network. The iterative nature of the algor ithm though does not o n its own gu arantee the scalability o f all the p roperties of the fundame ntal routing algorithm to the entire network . The first condition ne cessary for the scalability of the routing proto col is th e need to have th e numb er of lev els of abstraction L to be significantly smaller than the number of n odes n in the origin al network, as the size of the n etwork grows, i.e. L ≪ n , or equiv alently D ≪ 1 . The seco nd co ndition n ecessary to ach iev e p rotocol scalab ility relates to the char acteristic reaction times of the fu ndamen tal routing a lgorithm to cong estion and failures at the higher lev els of abstraction. The hig her lev els mu st use summarised informa tion, e.g. for congestion along their logical cycles, ov er longer time-scales to reflect the sum marised nature of this higher-lev el to pologica l neig hbou rhood . For example, if for a sufficiently sparse class o f network graphs it were to tur n out that L ∼ log n , as n → ∞ , it would be natu ral to select adaptation /update tim e intervals, τ ℓ , for higher levels th at grow exponentially , τ ℓ ≈ τ 0 · b ℓ , ℓ = 0 , . . . , L , f or some b ase b > 1 which depen ds on the sp arsity of the graph and a desirab le fastest ad aptation time, τ 0 , at phy sical level ℓ = 0 . V . C O N C L U S I O N The rou ting p rotocol we present can itself be conside red to be a nalogou s to the inter action mechanism of sou rce and destination no de p airs. Scalability of the protoco l pr operties is achieved thr ough its recur si ve nature, wh ich is essentially the algorithm ic expression of the Kadanoff tran sformation . The gen eric rou ting algorithm intro duces natural m etrics that lead to the defin ition o f top ological distance (or neigh- bourh ood), nam ely the nu mber of the logical le vel a t which two ph ysical nodes belong to the same logical vertex (or equiv alently the logical cycle one level below th is). The subsequen t association o f a r ange of to pologica l distances in a n etwork with a correspo nding ran ge of time-scales can then become the b uilding block fo r a truly adaptive family of r outing pro tocols. The maximum topolog ical distanc e, L , leading to th e no rmalised top ological d iameter, D = L/ n , is also an impor tant param eter that determ ines th e class of networks for which L N A -based r outing pr otocols can be m ade scalable. Naturally , num erous open qu estions remain . The mo st sig- nificant example o f such an op en q uestion is how can stable routing be a chieved with inco mplete or partially inco nsistent topolog ical inf ormation . Num erous graph theo retic issues also arise in the con text o f making the LNA un ique and its computatio n efficient. Besides its app lication to routin g, the LNA len ds itself to the analysis of the structure o f complex networks in terms of vulnerab ility to attrition of n odes, links and co mmon failure group s of nod es and links. A C K N O W L E D G M E N T The autho rs would like to thank the UK En gineerin g and Physical Sciences Research Coun cil for suppo rting this work under grant GR/T237 25/01. R E F E R E N C E S [1] The number of public ations addressing hierarchica l topology abstract ion and its exploit ation for compact routing are too numerous to list ex- hausti vely . Some milestone and/or recent papers are: L. Kleinr ock and F . Kamoun, “Hierarchi cal Routing for Large Networks, ” Comp. Net., vol.1, pp.155 –174, 1977; L. J. Co wen, “Compact Routing with Minimum Stretch , ” SODA ’99: Proc. tenth annual ACM-SIAM symp. on Discrete algorit hms, pp.255–260, 1999; D. Krioukov , K.C. Claff y , K. Fall and A. Brady , “On Compact Routing for the Internet , ” SIGCOMM Comput. Commun. Rev ., vol.37, pp.41–52, 2007. [2] C. Liebchen and R. Rizzi , “Classes of Cycle Bases, ” Discr . Appl. Math., vol.155 , pp.337–355, 2007. [3] J.D. Horton, “ A polynomial-time algorithm to find a shortest cycl e basis of a graph, ” SIAM J. Comp., vol.16, pp.359-366, 1987. [4] K. Mehlhorn and D. Michail , “Implementing Minimum Cycle Basis Algorith ms, ” A CM J. Exp. Algorithmics, vol.11, pp.1–14, 2006. [5] K.J. Baughan, C.C. Constanti nou, T . N. Arvani tis and A.S. Stepa- nenk o, “Data Communi cation Network pa tent appl icati on, ” PCT/EP2004/05019 5, 2004; and C. C. Constanti nou and A.S. Stepane nko, “ Analysis of Path Div ersity Structure in Networks using Recursi ve Abstracti on, ” UK patent applicatio n 0707666.4, 2007.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment