Separation of variables and integral manifolds in one problem of motion of generalized Kowalevski top
In the phase space of the integrable Hamiltonian system with three degrees of freedom used to describe the motion of a Kowalevski-type top in a double constant force field, we point out the four-dimensional invariant manifold. It is shown that this m…
Authors: Mikhail P. Kharlamov, Alex, er Y. Savushkin
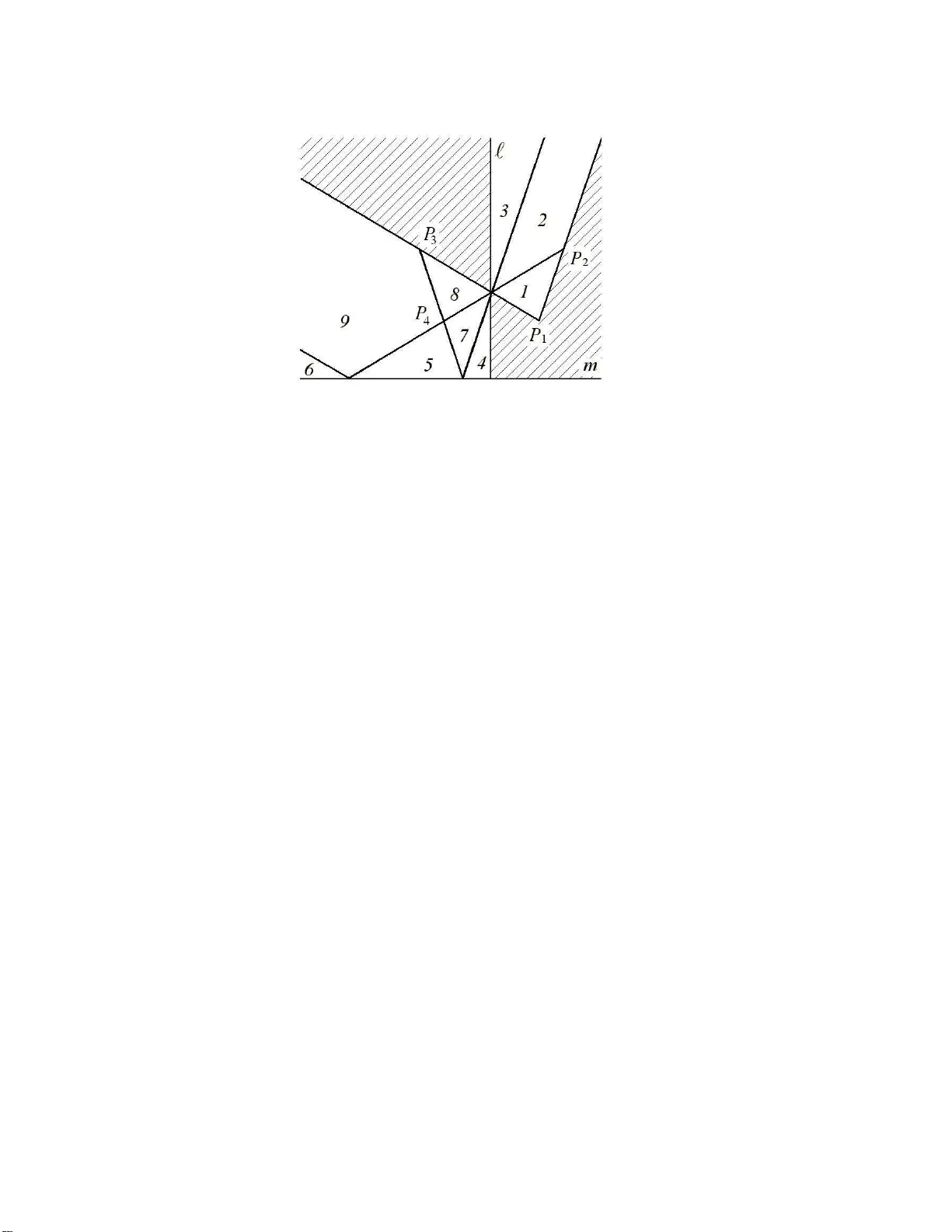
Separation of V ariables and In tegral Manifolds in One Problem of Motion of Generalized Ko w alevski T op Mic hael P . Kharlamo v and Alex ander Y. Sa vush kin ( Pr esente d by I.A. Lukovskii ) Abstract In th e phase space of the integrable Hamiltonian system with three degrees of freedom used to d escribe the motion of a Ko w alevski-type top in a double constan t force field, w e point out the f our-dimensional inv ariant manifold. It is sho wn that this manifold consists of critical motions generating a smo oth sheet of the b ifurcation diagram, and the induced dyn amic system is Hamiltonian wi th certain s ub set of p oints of degeneration of the symp lectic s tructu re. W e find the tra nsformation separating va riables in this s ystem. As a result, th e solutions can b e represented in terms of elliptic f unctions of time. The corresp on d ing phase top ology is completely describ ed . MSC 2000 . 70E17 , 70 E 40, 37J35 Key w ords. Kow alevsk i top, double field, inv ar iant manifold In tro duction The equa tions of r otation o f a rig id b o dy ab o ut a fixed p oint in a do uble constant force field hav e the form I d ω dt = I ω × ω + r 1 × α + r 2 × β , d α dt = α × ω , d β dt = β × ω , (1) where r 1 and r 2 are vectors immov able with r esp ect to the b o dy , α and β are vectors immov able in the inertial space, I is the tens or o f iner tia at the fixed p oint O , and ω is the instantaneous angular velocity (all of these ob jects are expr e ssed via their comp onents relative to certain axes strictly attached to the b o dy). It is as sumed that the vectors r 1 and r 2 hav e the origin O . The p o ints s pec ified by these vectors in the moving space are called the centers o f r ig ging. System (1) is a Hamiltonian system in the p hase space P 6 sp ecified in R 9 ( ω , α , β ) b y geo metric int egr als; P 6 is diffeomo rphic to the tangent bundle T S O (3). In [3], it is pr o p osed to use the pr oblem o f motion of a mag netized rigid b o dy in gravitational and magnetic fields and the problem o f motion of a rig id bo dy with constant distribution of e le ctric charge in gravitational and electr ic fields a s physical mo dels of Eqs. (1). T he r esults obtained for system (1) in [3] ar e presented in more details in [4] within the framework of inv estigation of the Euler equa tions on Lie algebr as. In the general case r 1 × r 2 6 = 0 and α × β 6 = 0, sys tem (1) without additional restrictions imp osed on the par ameters, unlike the classical Euler–Poisson equa tions, is not reducible to a Hamiltonian system with t wo degrees of freedom a nd do es not have known fir s t integrals o n P 6 , except for the energy integral H = 1 2 I ω · ω − r 1 · α − r 2 · β . In [3], the fo llowing assumptions are int ro duced for system (1): in the principa l axes of the inertia tensor O e 1 e 2 e 3 , (2) the momen ts of inertia satisfy the conditions I 1 = I 2 = 2 I 3 and the vectors r 1 and r 2 are parallel to the equatoria l pla ne O e 1 e 2 and mutually o rthogona l. F or β = 0, the pro blem reduces to the Kow alevski 1 int egr able ca s e of rotation of a heavy r igid b o dy [8]. Therefo re, for the sa ke of brevity , the problem prop osed in [3] is called the generalized Kow alevs ki ca se and the problem with β = 0 is ca lled the classic a l Kowalevski case. By the appropr iate choice of measurement units and axe s (2) one can o btain I = diag { 2 , 2 , 1 } ; (3) r 1 = e 1 , r 2 = e 2 . (4) In [3 ], a new genera l integral is indicated for the genera lized Kow alevski case. In virtue of r elations (3 ) and (4 ), this in tegra l a dmits a representation: K = ( ω 2 1 − ω 2 2 + α 1 − β 2 ) 2 + (2 ω 1 ω 2 + α 2 + β 1 ) 2 , (5) where ω i , α i , and β i ( i = 1 , 2 , 3) ar e the comp onents of the vectors ω , α , and β relative to the reference frame (2). In [10], in tegral (5) is generalized to the case of motion o f a gyros ta t in a linear force field by sup- plement ing a b o dy having pro pe rty (3) with an inner ro to r gener ating a co nstant moment along the axis of dyna mic symmetry . As shown, e.g, in [5], the comp onent of the moment genera ted by p otential forces int ro duced in [10] can be reduced to the same form a s in Eqs. (1) with prop erty (4 ). The complete Liouville integrability of the K ow alevski g y rostat in a double force field was prov ed in [2]. The Lax r epresentation of equatio ns o f type (1) (with gyros copic term in the moment of ex ternal forces, as in [10]) co ntaining the sp ectral parameter was obtained under co nditions (3) and (4). The sp ectral curve of this represe ntation ma de it possible to find a new first integral which is in inv olution with the corres p o nding gener a lization of integral (5) and turns into the squar e of the momentum in tegr a l for β = 0. Multi-dimensional ana logs of the Kow alevski problem w ere introduced in [2 ]. It was propo s ed to solv e these proble ms by the metho d of finite-band in tegr ation. This progra m was realized in [2] for the classical Kow alevski top and new ex pr essions for the pha se v ariables in the form of sp ecial hyper-elliptic functions of time were o btained. The explicit integration of the problem of motion of the Kow alevski top in a do uble field and its qualitative and topo logical ana ly sis hav e not b een p erformed yet (see also a survey in [5]). The top ologica l analy s is o f an integrable Ha milto nia n system includes the descriptio n (in cer tain terms ) of the foliation of its phase s pace into Liouville tori. In particular, this requires finding all separating cases. These cases corres p o nd to the p oints of the bifurc a tion diagram of the in tegra l map and, in the phase space, are for med by the tra jectorie s co mpletely co nsisting of the p o int s at which the fir st integrals ar e not independent. In a system with three degrees o f freedom, t wo-dimensional Liouville tori are , as a rule, filled with sp ecial motions corr esp onding to a po int of the smo oth tw o-dimensional s heet of the bifurcatio n dia gram. The union of these tor i ov er all p oints of the shee t is an in v ariant subse t of the pha se space . In the neig hborho o d o f a po int of general p osition, this subset is a fo ur -dimensional manifold, a nd the dyna mic system induced on this subset must b e Hamiltonian with tw o degrees of freedom (degener a tions o f v arious kinds are exp ected a t the bo undary o f this shee t or at the p oints of intersection of shee ts ). Thus, the inv ariant subsets of maximum dimension formed by the p oints of depe ndence of integrals a re sp ecified (at least, lo cally) by systems of t wo inv ar iant rela tions of the form f 1 = 0 , f 2 = 0 . (6) The k nowledge of all these systems and the analysis o f the dynamics on inv ar ia nt manifolds s pe cified by thes e systems is essential to fulfil the top o lo gical analy s is of the en tire problem. In the gener alized Kowalevski case, w e know tw o sy stems o f the form (6). The first one is obtained in [3]. Co nsider the manifold { K = 0 } ⊂ P 6 . (7) Due to the structure of function (5), this ma nifold is sp ecified by t wo indep endent equa tions Z 1 = 0 and Z 2 = 0. An additional pa rtial integral (Poisson brack et { Z 1 , Z 2 } ) is indicated. The top olo g ical analysis of the induced Ha milto nia n system with tw o deg r ees of freedom is car ried out in [1 1]. It turns out that the inv ar iant set is a four -dimensional manifold, whic h is smo oth everywhere but the res tr iction to it of the symplectic structure degener ates on the set of zeros of the a dditio na l int egr al. This case genera lizes the first Appelr ot cla ss (Delone class) [1] of mo tions of the classica l K ow alevski case. 2 The second system of the for m (6) is obtained in [7]. It is shown that, for β = 0 , the cor resp onding motions transfor m into so-ca lled esp e cial ly r emarkable motions o f the second and third App elrot class es. The present work is dev oted to the in vestigation of the dynamic sy stem on the inv a riant subse t indicated in [7]. First, we make a gener al remar k imp ortant for the sequel. The moment o f external forces r 1 × α + r 2 × β app earing in (1) is preser ved by the ch ang e ˜ r 1 ˜ r 2 = Θ r 1 r 2 , ˜ α ˜ β = (Θ T ) − 1 α β , (8) where Θ is an ar bitrary non-singular 2 × 2 matrix. Therefore, the a-priori assumption made in [3], [2 ] concerning the orthogo nality of the radius vectors o f the centers of rigging is redundant (it suffices to r equire that these centers lie in the equator ial plane of the b o dy ). This statement is trivial enough; the po s sibility of ortho gonalizatio n of any pair ( r 1 , r 2 ) or ( α , β ) is indicated, e.g., in [5]. Howev er, the author s of [5] also indicate that, in genera l case, the sec o nd pair is not orthog onal. Moreov er, in [3, 4, 2 , 1 1, 7 ], the ang le betw een α a nd β remains ar bitr ary . This fact makes the corresp o nding fo rmulas more complicated. Note that if the pair ( r 1 , r 2 ) is made ortho no rmal, then there remains the arbitrar y c hoice of Θ ∈ S O (2). Under such transfor mation, a new pair of radius vectors o f the c e n ters of r igging r emains orthonorma l and can b e used a s equato rial unit vectors of the principal a xes (2) to pres e rve prop erties (4). At the same time, by cho osing Θ = cos θ sin θ − sin θ cos θ , tan 2 θ = 2 α · β α 2 − β 2 , we g et the orthogonal pair ( ˜ α , ˜ β ). Thu s, w itho ut los s o f ge ne r ality , in addition to relations (4), we ca n assume that the force fields are orthogo nal. This simple fa c t ha s not b een indicated yet. The elimination of the redundant par ameter makes it p oss ible to sig nificantly simplify all subseq uent ca lculations and to obtain r esults in a symmetric form. 1 In v arian t S ubset and Its Prop erties In the sequel, we consider sy stem (1) under a ssumptions (3) and (4) with the phase spa ce P 6 sp ecified by the for mulas α 2 = a 2 , β 2 = b 2 , α · β = 0 . (9) The ca se a = b is singula r. Indeed, as indicated in [10], in this case, ther e exist a gr oup of symmetries generated by the transfor mations of the c o nfiguration space a nd, hence, a cyclic integral linear in the a ngular velocities. Therefore, for the sake of being definite, w e s e t a > b. (10) Denote by G the general in tegr a l of the problem o bta ined in [2] and represent it in the form G = 1 4 ( g 2 α + g 2 β ) + 1 2 ω 3 g γ − b 2 α 1 − a 2 β 2 , (11) where g α , g β , a nd g γ are the scalar pr o ducts of the kinetic momentum I ω and the vectors α , β , α × β , resp ectively . Int ro duce the function F by s etting F = (2 G − p 2 H ) 2 − r 4 K, where the parameters p and r are sp ecified as follows: p 2 = a 2 + b 2 , r 2 = a 2 − b 2 . (12) The la tter is well defined due to ineq ua lity (10). Obviously , F is a co mbined first integral of E qs. (1). Note that the ze r o level of the function F is specifie d by o ne o f the conditions 2 G − p 2 H − r 2 √ K = 0; (13) 3 2 G − p 2 H + r 2 √ K = 0 . (14) If β = 0 , then these conditions reduce to the equations of the second a nd third Appelr ot classes, resp ectively [1]. Define the subset N ⊂ P 6 as the set o f critical p o ints of the function F lying on the level F = 0. The set N is definitely non- empt y; it co nt ains, e.g ., a ll po int s of the for m ω 1 = ω 2 = 0 , α 1 − β 2 = 0, and α 2 + β 1 = 0, whic h a r e critica l for K a nd turn the expres s ion 2 G − p 2 H into zero. The se t N is inv a riant under the phase flow of (1) as the set of critical p o in ts o f the general integral. The co ndition dF = 0 means that the differentials of the functions H , K , and G are linea rly dep endent at the p oints of N . It immediately implies that the relation (2 g − p 2 h ) 2 − r 4 k = 0 (15) for the constan ts of these integrals is the equation of one of the s he e ts of the bifurcation diagram (the inv estigation of this diagr am has not b een co mpleted yet) of the genera lized K ow alevski top. W e use the following complex change of v ariables [7] (a g eneralizatio n of the K ow alevski change; see [8]): x 1 = ( α 1 − β 2 ) + i ( α 2 + β 1 ) , x 2 = x 1 , y 1 = ( α 1 + β 2 ) + i ( α 2 − β 1 ) , y 2 = y 1 , z 1 = α 3 + iβ 3 , z 2 = z 1 , w 1 = ω 1 + iω 2 , w 2 = w 1 , w 3 = ω 3 . (16) Denote the op er ation of differentiation with resp ect to the ima ginary time it by primes and r ewrite the equations o f motion in terms of the new v a riables: x ′ 1 = − x 1 w 3 + z 1 w 1 , x ′ 2 = x 2 w 3 − z 2 w 2 , y ′ 1 = − y 1 w 3 + z 2 w 1 , y ′ 2 = y 2 w 3 − z 1 w 2 , 2 z ′ 1 = x 1 w 2 − y 2 w 1 , 2 z ′ 2 = − x 2 w 1 + y 1 w 2 , 2 w ′ 1 = − ( w 1 w 3 + z 1 ) , 2 w ′ 2 = w 2 w 3 + z 2 , 2 w ′ 3 = y 2 − y 1 . (17) Constraints (9) now ta ke the form z 2 1 + x 1 y 2 = r 2 , z 2 2 + x 2 y 1 = r 2 , x 1 x 2 + y 1 y 2 + 2 z 1 z 2 = 2 p 2 . (18) F urther on, instead of integral (11), it is conv enient to consider another general integral linear ly ex- pressed via G a nd H , na mely , M = 1 r 4 (2 G − p 2 H ) . (19) On the level F = 0, we have K = r 4 M 2 . (20) In terms of v ariables (16 ), r e w r ite the integrals H , K , a nd M a s follows: H = w 1 w 2 + 1 2 w 2 3 − 1 2 ( y 1 + y 2 ) , K = U 1 U 2 , M = − 1 2 r 4 F 2 1 + 1 2 r 2 ( U 1 + U 2 ) , where F 1 = √ x 1 x 2 w 3 − 1 √ x 1 x 2 ( x 2 z 1 w 1 + x 1 z 2 w 2 ) , U 1 = x 2 x 1 ( w 2 1 + x 1 ) , U 2 = x 1 x 2 ( w 2 2 + x 2 ) . Consider the function F 2 = U 1 − U 2 . 4 Prop ositi on 1. 1. In the domain x 1 x 2 6 = 0 , the invariant set N is sp e cifie d by t he following system of functional ly indep endent e quations: F 1 = 0 , F 2 = 0 . (21) Pr o of. Repr esent re la tion (20) in the form F 2 1 − r 2 ( p U 1 − p U 2 ) 2 F 2 1 − r 2 ( p U 1 + p U 2 ) 2 = 0 , (22) where p U 1 and p U 2 are chosen to b e complex c o njugates o f each other. On the level F = 0, the functions F 1 , p U 1 , and p U 2 are indep endent everywhere except for the set w 1 w 2 = 0 , x 1 = x 2 . (23) Therefore, the co ndition that the left-hand side of Eq . (2 2 ) ha s a critical p oint leads to E q s. (21). It is clear that p oints (23 ) als o satisfy these equations. Thus, it remains to notice that the functions F 1 and F 2 are indep endent o n the le vel F = 0 everywhere in their domain of definition including p oints (23). The s ystem of inv ar iant rela tio ns (21) is obtained in [7] without using the first integrals. In virtue of the above definition a nd Pro po sition 1.1, the indicated system describ es a cer ta in smo o th four -dimensional (non-closed) ma nifo ld N 4 = N ∩ { x 1 x 2 6 = 0 } , and N is the le a st inv ariant subset of P 6 containing N 4 . Remark 1.1. It is eas y to see that the in v ariant set N , a s a whole, is stra tified, namely , N = 4 ∪ i =1 N i , dim N i = i, ∂ N i ⊂ i − 1 ∪ j =1 N j . Moreov er, in virtue o f Pr op osition 1.1, a ll N i with i < 4 b elo ng to a s ubset of the phase s pa ce s pe cified by the equa tion x 1 x 2 = 0 (24) (e.g., N 1 = { w 1 w 2 = 0 , w 3 = 0 , x 1 x 2 = 0 } is diffeomo rphic to 2 S 1 ). Therefore, the existence of singula rity (24) in the ex pr essions for F 1 and F 2 is in no case a ccidental. If, in re la tions (21 ), we remove the denomina- tors, then the set o f solutio ns of the obtained s ystem co nt ains the entire four -dimensional manifo ld (2 4 ). This manifold is not everywhere critical for the function F (how ev er, F is identically zero on it). In pa rticular, all tr a jectories starting from this manifold fill a set in P 6 , which is almos t everywhere five-dimensional. The follo wing statement demonstra tes that if w e restrict ourselves to relations (21 ), i.e., study the dynamics only on N 4 , then we do no t lo s e any tra jectory of the dynamic sy stem on N . Prop ositi on 1 .2. Set (24) do es not c ontain subset s invariant under the phase flow of system (1) . T o prov e this prop osition, it is necess ary to compute the deriv atives of x 1 x 2 in virtue of Eqs. (17) up to the fourth order , inclusively , and show that they cannot v anish simult aneo usly on the set s pe c ified by relation (2 4). It is worth noting that the indica ted str o ng degenera tio n o f this subset a lso takes place for motions of the heavy Kowalevski top. In that case, condition (24) means that the axis of dynamic sy mmetry of the top is vertical. Specia l a ttent ion is given to this phenomenon b o th in the cla ssical pap ers (see, e .g ., [1]) and in r ecent inv estigations dealing with the computer animation o f mo tio n (see [9 ] , where one can also find an extensive bibliogr aphy o f works in this field devoted to the investigation of heavy Kow alevski tops). Prop ositi on 1.3. The differ ential 2-form induc e d on the manifold N 4 by t he symple ctic structur e of the sp ac e P 6 pr oviding the Hamiltonian pr op erty of Eqs. (1) is non-de gener ate everywher e exc ept for the su bset sp e cifie d by the e qu ation L = 0 , wher e L = 1 √ x 1 x 2 h w 1 w 2 + x 1 x 2 + z 1 z 2 2 r 2 ( U 1 + U 2 ) i . 5 Pr o of. T he Poisson brack ets of the functions on R 9 ( ω , α , β ) sp ecifying the indicated symplectic structur e are deter mined acc ording to the following rules [3]: { g i , g j } = ε ij k g k , { g i , α j } = ε ij k α k , { g i , β j } = ε ij k β k , { α i , α j } = { β i , β j } = { α i , β j } = 0 , (25) where g 1 = 2 ω 1 , g 2 = 2 ω 2 , and g 3 = ω 3 are the comp onents o f the kinetic mo men tum. In relations (25), we now pass to v ar iables (16 ) and co mpute the Poisso n brack et for the functions F 1 and F 2 . In view of relations (21), this gives { F 1 , F 2 } = − r 2 L. The tangent space T q N 4 is a s kew-orthog onal complemen t of the span o f vectors included in the Hamiltonian fields with Hamiltonians F 1 and F 2 . By the Ca rtan for mula (see, e.g ., [6], p. 231), the restriction of the symplectic structure to T q N 4 is non-dege nerate provided that { F 1 , F 2 } ( q ) 6 = 0. Prop ositi on 1.4. The fun ct ion L is the first inte gr al of the dynamic syst em induc e d on N 4 . Mor e over, t his inte gr al is in involution with the inte gr al M . Pr o of. As shown in [7], in virtue o f (17) we can write F ′ 1 = µ 1 F 2 , F ′ 2 = µ 2 F 1 . Here µ 1 and µ 2 are functions smo oth in the neighbor ho o d of N 4 . In v ie w of these equalities, apply the Jacobi ident ity to the functions H , F 1 , a nd F 2 and obtain that the double Poisson bra ck et { H , { F 1 , F 2 }} is a line a r combination of the functions F 1 and F 2 . Therefo re, L ′ ≡ 0 on the s et sp ecified by r elation (21 ). It is shown by direct ca lculation that the following rela tion is tr ue under conditions (21 ): L 2 = 2 p 2 M 2 + 2 H M + 1 (26) and, ther efore, L { L, M } = M { H, M } ≡ 0 . It means that { L , M } = 0 for L 6 = 0. Hence, by contin uity , { L, M } = 0 everywhere on N 4 . Thu s, in the smo oth par t N 4 of the inv ar iant s ubset N completely sp ecifying the entire dyna mics on N , the equations of motion o f the gener alized Kowalevski top define the Hamiltonian system with t wo deg rees of free dom with a closed s ubset o f p oints of degenera tion of the s ymplectic s tr ucture nowhere dense in N 4 . 2 Analytic Solution By Pr op osition 1.4, to integrate the eq ua tions of motion in the set N , we can use the integrals M and L . The orig inal gener al in tegra ls H , K , and G a re expressed via these in tegra ls b y using relations (19), (20), and (2 6 ). Theorem 2.1 . On an arbitr ary inte gr al manifold J m,ℓ = { M = m, L = ℓ } ⊂ N , (27) the e quations of motion ar e sep ar ate d in the variables s 1 = x 1 x 2 + z 1 z 2 + r 2 2 √ x 1 x 2 , s 2 = x 1 x 2 + z 1 z 2 − r 2 2 √ x 1 x 2 (28) and take t he form s ′ 1 = q s 2 1 − a 2 r ms 2 1 − ℓs 1 + 1 4 m ( ℓ 2 − 1) , s ′ 2 = q s 2 2 − b 2 r ms 2 2 − ℓs 2 + 1 4 m ( ℓ 2 − 1) . (29) 6 Pr o of. In virtue o f the fir st eq uation in (21 ), the function M tak es the following form on N : M = 1 2 r 2 ( U 1 + U 2 ) . In virtue of the sec o nd eq uation in (21), we get U 1 = U 2 . There fore, the integral equation M = m yields U 1 = r 2 m and U 2 = r 2 m. (30) Determine w 3 from the first equation in (21) and w 1 and w 2 from Eqs . (30). W e o btain w 3 = z 1 w 1 x 1 + z 2 w 2 x 2 , w 2 = r x 2 x 1 R 1 , w 1 = r x 1 x 2 R 2 , (31) where R 1 = p r 2 m − x 1 and R 2 = p r 2 m − x 2 . (32) Substituting these quantities in the equation of the integral L , w e o btain m ( x 2 + z 2 ) − ℓx + p r 4 m 2 − 2 r 2 mx co s σ + x 2 = 0 . (33) The v ariables x, z , and σ are defined as follows x 2 = x 1 x 2 , z 2 = z 1 z 2 , x 1 + x 2 = 2 x cos σ , (34) and the radical in (33 ) corresp o nds to w 1 w 2 , and therefore is no n-negative. The o ther radicals use d ab ov e, including R 1 and R 2 , are algebraic. Equation (3 3) now yields R 1 R 2 = ℓx − m ( x 2 + z 2 ) , R 2 1 + R 2 2 = 1 r 2 m { [ ℓx − m ( x 2 + z 2 )] 2 − x 2 } + r 2 m, Int ro ducing the p olyno mial Φ( s ) = 4 ms 2 − 4 ℓ s + 1 m ( ℓ 2 − 1) , we c a n write in terms o f v ariables (28) R 1 + R 2 = r s 1 − s 2 p Φ( s 2 ) and R 1 − R 2 = r s 1 − s 2 p Φ( s 1 ) . (35) Using c o nstraints (18) and rela tions (34), we obtain ( z 1 ± z 2 ) 2 = 1 r 2 [( x 2 + z 2 ± r 2 ) 2 − 2 x 2 ( p 2 ± r 2 )] . Hence, in terms of v a riables (28), z 1 + z 2 = 2 r s 1 − s 2 q s 2 1 − a 2 , z 1 − z 2 = 2 r s 1 − s 2 q s 2 2 − b 2 . (36) W e now differentiate rela tions (28) in virtue of system (17). In v iew of (31), we g et s ′ 1 = r 2 4 x 2 ( z 1 + z 2 )( R 1 − R 2 ) and s ′ 2 = r 2 4 x 2 ( z 1 − z 2 )( R 1 + R 2 ) . Substituting expressions (35 ) and (36 ) in these equalities, we ar rive a t sy s tem (29). Remark 2.1. It is clear that the deduced equatio ns ca n b e integrated in elliptic functions o f time. B y using the standar d pr o cedure, the solutions are express e d in terms of Jaco bi functions. Their specific for m depe nds on the lo ca tion of the ro ots of the p o lynomials under the r adicals on the right-hand s ides. The bifurcation solutions of systems o f this type co rresp ond to stationar y p o int s of o ne of the equatio ns, i.e., to the cas es for whic h the p o lynomial ( s 2 − a 2 )( s 2 − b 2 )Φ( s ) (37) 7 po ssesses a multiple ro ot. F or dimension rea s ons, the or iginal phase v ariables on manifold (27) a re expressed via s 1 and s 2 , though, in genera l, these expressions mig ht b e multi-v alued functions . W e now show that the latter hav e a fairly simple a lgebraic form. Int ro duce the following notation: S 1 = q s 2 1 − a 2 , ϕ 1 = p − Φ( s 1 ) , S 2 = q b 2 − s 2 2 , ϕ 2 = p Φ( s 2 ); (38) ψ = 4 ms 1 s 2 − 2 ℓ ( s 1 + s 2 ) + 1 m ( ℓ 2 − 1) . (39) Theorem 2.2. O n the c ommon level of the first inte gr als (27) , by using notation (38) , (39) , t he phase variables of t he gener alize d K owalevski c ase c an b e ex pr esse d, in t erms of variables (28) , as fol lows: α 1 = 1 2( s 1 − s 2 ) 2 [( s 1 s 2 − a 2 ) ψ + S 1 S 2 ϕ 1 ϕ 2 ] , α 2 = 1 2( s 1 − s 2 ) 2 [( s 1 s 2 − a 2 ) ϕ 1 ϕ 2 − S 1 S 2 ψ ] , β 1 = − 1 2( s 1 − s 2 ) 2 [( s 1 s 2 − b 2 ) ϕ 1 ϕ 2 − S 1 S 2 ψ ] , β 2 = 1 2( s 1 − s 2 ) 2 [( s 1 s 2 − b 2 ) ψ + S 1 S 2 ϕ 1 ϕ 2 ] , (40) α 3 = r s 1 − s 2 S 1 , β 3 = r s 1 − s 2 S 2 , ω 1 = r 2( s 1 − s 2 ) ( ℓ − 2 ms 1 ) ϕ 2 , ω 2 = r 2( s 1 − s 2 ) ( ℓ − 2 ms 2 ) ϕ 1 , ω 3 = 1 s 1 − s 2 ( S 2 ϕ 1 − S 1 ϕ 2 ) . Pr o of. B y using notation (12 ), we r epresent the compatibility conditions of constra ints (18) in the v ariables x and z as follows: x 2 + z 2 + r 2 > 2 a | x | , x 2 + z 2 − r 2 6 2 b | x | , whence we get the natura l ra nges for v ariable s (2 8 ): s 2 1 > a 2 and s 2 2 6 b 2 . (41) Hence, r ewriting Eqs . (29 ) in the rea l for m, we conclude that, for given m and ℓ , the domain of p ossible motions in the plane ( s 1 , s 2 ) is determined, along with ineq ua lities (41), by the inequalities Φ( s 1 ) 6 0 and Φ( s 2 ) > 0 . (42 ) Thu s, in par ticular, a ll v alues (38) ar e rea l on the tra jectories of the analyzed system. The expressio ns for the complex v ariables x 1 , x 2 , z 1 , z 2 , w 1 , w 2 , a nd w 3 in ter ms of s 1 and s 2 are obtained by a pplica tion, in sequence, of relations (35) with r e gard for (32), then (36 ), and, finally , (31 ). After this, the v ar iables y 1 and y 2 are determined from the fir s t tw o rela tions in (18). By the change of v ariables inverse to (16 ), we arrive a t the required dep endencies (40). Note that the v a lue s 1 = ∞ is or dinary for the firs t equation in (29 ) (be c ause the deg ree of the po lynomial under the ra dical on the right-hand s ide is even). More ov er, if this v a lue b elo ngs to the domain of p os sible motions, then it is reached dur ing a finite p erio d o f time. Similar ly , rela tions (40 ) also do not hav e singula rities in this case. This can b e proved by the change of v ariables s 1 7→ 1 /s 1 . Thus, in particula r, we hav e deduced a nalytic expr essions for all c a ses in which the tr a jector ie s pass the set sp ecified by r elation (24). It means that we have cons tr ucted the complete analytic solution o f the proble m on the inv ariant set N . 8 3 Phase T op ology In the regula r case, the integral manifold J m,ℓ consists of tw o-dimensional Liouville tori. The ca s es when they top olog ically rea r range gener a te the bifurc ation diagra m of the sy stem o n N . It is na tural to s tudy this diagram in the plane of cons tants of the used in tegra ls, i.e., a s the set of critica l v alues of the map J = M × L : N → R 2 . (43) Theorem 3.1 . The bifur c ation diagr am of m ap (43) is a p art of the syst em of str aight lines ℓ = − 2 ma ± 1 , ℓ = 2 ma ± 1 , ℓ = − 2 mb ± 1 , ℓ = 2 mb ± 1 , (44) and the c o or dinate ax es of t he plane ( ℓ, m ) lying in the half-plane ℓ > 0 and sp e cifie d by the c onditions of existenc e of r e al s olut ions ℓ > max (2 ma − 1 , − 2 mb + 1) , m > 0; ℓ 6 − 2 mb + 1 , m < 0; ℓ = 1 , m = 0 . (45) Pr o of. Acco rding to Remar k 2.1, the diagr am co n tains the discriminant set of p oly nomial (37) for med by straight lines (44) (in the part cor resp onding to the existence of motions). The p oints of the co ordinate axes in the plane ( m, ℓ ) b elonging to J ( N ) m ust b e included in the diagram; indeed, it can b e shown that the v alues m = 0 a nd ℓ = 0 a re attained, in par ticular, on the subsets N i ( i < 4) , where N fails to b e smo o th (see Remark 1.1). The analytica l foundation for this inclusion is as follows. In Eq s. (2 9), we can pass to the limit as m → 0. As a result, by using relations (26 ), we conclude that | ℓ | → 1 and ( ℓ 2 − 1) / 2 m → h . At the same time, the de g ree o f the p olynomials under the r adicals decreases to three; the form of so lutions changes. Moreov er, it is clear that K equals zero o n the set N ∩ { M = 0 } , i.e., the corr esp onding motions a lso b elong to the cla ss (7). [It is worth noting that, a s shown in [1 1], the restriction o f symplec tic structure to manifold (7 ) deg enerates just at the p oints o f corr esp onding tra jectories.] Therefor e, the v alue m = 0 should b e rega rded as corresp o nding to bifurcation. On the other ha nd, the integral s urface J m,ℓ is preser ved by the in version ( α 3 , β 3 , ω 3 ) 7→ ( − α 3 , − β 3 , − ω 3 ) . In re lations (40 ), this inv ersion is realized either by changing the sign o f the radicals S 1 and S 2 or by the substitution ( ℓ , s 1 , s 2 ) 7→ ( − ℓ, − s 1 , − s 2 ). This means that J m,ℓ and J m, − ℓ are the same subset of the phase space. T he r efore, we need to restrict ourse lves to the v alues of ℓ of the same s ign (to b e definite, we choos e non-neg ative v alues); the axis ℓ = 0 b ecomes the outer b ounda r y of the doma in o f existence of motions in the plane of c o nstants of the integrals. In virtue of E q. (33), ℓ can equal zer o only for neg a tive v alues of m . Thu s, in a ddition to (4 4), the diagra m should als o be supplemented with the p oint { m = 0, ℓ = 1 } and the semi-a xis { ℓ = 0 , m < 0 } . (46) By ana ly zing the compatibility of conditions (41) and (42), we determine the actual regio n of existence of motio ns in the form (45). In Fig. 1 , the doma ins with num ber s 1 –9 defined by the dia g ram in the plane ( m, ℓ ) corresp o nd to different types of the integral surfaces (27 ). The motion is impo ssible in the sha ded r e gion. T o determine the num be r of tori for the r e g ular manifold, we note that relatio ns (40) give a one- v alued depe ndence o f the pha se v ariables on tw o collections of quantities ( s 1 , S 1 , ϕ 1 ) and ( s 2 , S 2 , ϕ 2 ) . (47) In this case , the signs of the ra dic a ls in (3 8) o n e ach J m,ℓ are a rbitrary . How ever, along the tra jectory , some r a dicals tur n to zero a nd then change the s ign. This means that tw o p oints that only differ by the sig n of such radical lie in the same connected co mpo nent o f J m,ℓ . Ther e fore, the num b er of co nnected comp onents of the regular in tegra l manifold is equal to 2 n , where n is the n umber of quantities (38) non-zer o along the tra jectory . The v alue of n is determined a c c ording to the lo cation o f r o ots o f p olyno mia l (37) a nd do es not exceed 2. 9 Figure 1: Bifurcation diagram and the domains of existence of motions Prop ositi on 3 .1. Assume that the analyze d domains ar e numb er e d as indic ate d in Fig. 1 . Then the inte gr al manifolds J m,ℓ c an b e describ e d as fol lows: a) T 2 , in domains 1 and 8 , b) 2 T 2 , in domains 2 , 7 , and 9 , and c) 4 T 2 , in domains 3 – 6 . T o determine the type of critica l integral surfaces, we note that, in each thre e-dimensional space of collections (47), equa lities (38) sp ecify a pa ir of cylinders (elliptic o r h yp erb olic) with mutually orthogo nal generatric es. F or the p oints of the s traight lines (44), a pair of cylinder s co rresp onding to one of the v ariables s 1 or s 2 has a tangency p oint. Hence, the line of their intersection is the eig ht curve S 1 ∨ S 1 . Thus, on segments o f the str aight lines (44) b ounded by the p oints of lines int ers ection and internal for doma in (45), the integral sur face co ns ists of the comp onents ho meomorphic to the pro duct S 1 × ( S 1 ∨ S 1 ). Crossing s uch segment, we obser ve one o f bifurcations T 2 → 2 T 2 t ypical for sy stems with tw o deg rees of free do m. The nu mber of connec ted comp onents of the form S 1 × ( S 1 ∨ S 1 ) in the critica l J m,ℓ is determined by the num b er of tori in the adjacent domains . Actually , the critica l per io dic tra jectories (the tr aces o f centers of the eight curve) are motions in which one of v ariables s 1 or s 2 remains constant and equal to the multiple ro ot of the corres p o nding p o ly nomial under the radical. In this case, either S 1 ≡ 0 and ϕ 1 ≡ 0 or S 2 ≡ 0 and ϕ 2 ≡ 0. Hence, it follows from r elations (40 ) that ω 2 = ω 3 ≡ 0 in the first case and ω 1 = ω 3 ≡ 0 in the second case. The b o dy p erfor ms p endulum motions in which the radius vector of one of the centers of r igging is per manently dir ected along the corres po nding force field. In approa ching the outer b oundar y of domain (45) with the exception of the half-line (46), the tori degenera te in to circles (p erio dic solutions of the indicated pendulum type) and the surfaces S 1 × ( S 1 ∨ S 1 ) degene r ate into eight curves. It is clear that the cr itical single-fr e quency motions do no t app ear in the half-line (46). The cor r esp ond- ing bifurcation in the seg men ts adjacent to domains 5 a nd 6 is characteriz e d by the fact that the num b er of connected comp onents o f J m, 0 is half as large as a t the close r egular p oint of the plane ( m, ℓ ). These ar e so- called minimal tori. The transition from domain 4 to a s egment of the b oundar y set (46) is not accompa nied by the decrease in the num b e r of comp onents of J m,ℓ and all cycles homo to pic to a cer tain ma rked cy cle are folded so that each comp onent cov ers the limiting compo nent twice. In a sufficiently smo oth case (e.g., in the cas e when L is a Bott integral on the corr esp onding smo oth level of the int egr al M ), a Klein b ottle should b e obtained as a result (see, e.g., [6]). How ever, accor ding to the explic it equa tions (40), this is not true in o ur case. Most likely , this phenomeno n is connected w ith the degener ation of the induced symplectic structure. Finally , consider the no des denoted b y P 1 – P 4 in Fig. 1. F or these v alues o f the c o nstants of integrals, each s urface J m,ℓ contains one singular po int. These p oints corres po nd to the e q uilibria o f the b o dy in which bo th centers of rig ging lie o n the co r resp onding axes of force fields and, henc e , the moment of forces is e q ual to ze r o. O ne o f these p oints is stable: at P 1 , the int egr al surfa ce consists of a single p oint. The other three po ints ar e unstable. As indicated ab ove, a t the no des P 2 and P 3 the integral s urface is homeomor phic to an eight cur ve. At the no de P 4 the integral surface can b e describ ed a s follows. T ake a rectang le and identify its vertices w ith one po int ; it then can b e filled with tr a jectorie s double-asymptotic to the singular p oint. The bo undary of this set is a bunch of four circ le s. This b o unda ry represe n ts t wo pair s of p endulum mo tions; each pair is asy mptotic to the highest p osition of one of the tw o centers o f rigging. T ake four copies of the 10 obtained set and attach the bounda r y of ea ch to the same bunch of four cir c les. All indicated phenomena a re readily established by analyzing r elations (40) and the mutual lo c ation of the cylinder s formed in spaces (47). Conclusions In the present work, we p er form the complete inv estiga tio n of motions of the genera lized Kowalevski top playing the ro le of cr itical motions for the entire problem and generating bifurcations o f three-dimensiona l Liouville tori along paths crossing the sheet sp ecified by Eq. (15 ) o f the bifurcation diag ram Σ ⊂ R 3 of the general int egr als of the pr oblem. Inequalities (45) are used to deduce the eq uations of the b ounda r y of a part of this s hee t cor resp onding to the existence of actual critical motions , i.e., cont ained in Σ . Consider rela tion (22). It plays the r ole of the equa tion of the entire in tegr al sur face in the phas e space P 6 for the co llection of constants of integrals sa tisfying relation (15). It then follows, similar to the case of the heavy Kow alevski top (the s econd and third Appelro t classes), that the straight line { k = 0 , 2 g = p 2 h } splits sheet (15) into tw o cla sses. In the fir s t class sp ecified by relatio n (13) and cor resp onding to the first non-negatively definite factor in (22), the obtained integral manifolds, being cr itical for the orig inal system, exhaust the en tire cor r esp onding integral surface in P 6 as the limit o f a concentric fa mily of three-dimensiona l tori and are, in this sens e , stable in P 6 . In the second class sp ecified by relatio n (14) and corr esp onding to the second (hyperb olic ) factor in (22), all obtained critical sur faces in P 6 are hyper b o lically unstable: on the sa me level of the first three integrals, one can find tra jectories consisting o f regular po int s a nd double-asymptotic to the corre s po nding tw o-dimensional tor i of the system on the investigated inv aria nt set. References [1] G. G. App elrot, Inc ompletely S ymmet ric He avy Gyr osc op es , in: Mo tion of a Rigid Bo dy Ab out a Fixe d Poin t [in Russian], Izd. Ak ad. Nauk SSSR, Mo scow, 194 0, pp. 6 1–156 . [2] A. I. Bo b enko, A. G. Reyman, and M. A. Semenov-Tian-Shansk y , The Kowalewski top 99 ye ars later: a L ax p air, gener alizations, and explicit solutions // Commun. Ma th. P hys., 122 (1 989), No. 2 , 3 21–3 54. [3] O . I. Bogoya vlensky , Euler e quations on fin ite-dimensional Lie algebr as arising in physic al pr oblems // Commun. Ma th. Phys., 95 (198 4), 307 –315 . [4] O . I. Bo goy avlensky , Inte gr able Euler e quations on Lie algebr as in pr oblems of mathematic al physics // Izv. Ak ad. Nauk SSSR, Ser . Mat., 48 (1984 ), No . 5, 8 83–9 3 7. [5] A. V. Borisov and I. S. Ma maev, Rigid Bo dy Dynamics [in Russian], RCD P ubl., Moscow-Izhevsk, 2001 . [6] A. T. F o menko, Symple ctic Ge ometry. Metho ds and A pplic ations [in Russ ia n], Moscow State University , 1988. [7] M. P . K harlamov, One class of solut ions with two invariant r elations of the pr oblem of motion of the Kowalevski top in a double c onstant field // Mekh. Tverd. T ela (200 2), Issue 32 , 32– 3 8. [8] S. Kow alevsk i, Sur le pr obl ` eme de la r otation d’un c orps solide autour d’un p oint fixe / / Acta Math, 12 (188 9), 177 –232 . [9] P . H. Ric hter, and H. R. Dullin, A. Wittek, Kowalevski T op. Film C1 961 // T echn. Wiss./Naturw. (1997), No. 13, 3 3 –96. [10] H. Y ehia, New inte gr able c ases in the dynamics of rigid b o dies // Mech. Res . Commun. 13 (1 986), No. 3, 169–1 72. [11] D. B. Zo tev, F omenko–Zieschang invariant in the Bo goyavl enskyi c ase // Reg. Chaot. Dynam., 5 (200 0), No. 4 , 437– 458. 11
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment