About the true type of smoothers
We employ the variational formulation and the Euler-Lagrange equations to study the steady-state error in linear non-causal estimators (smoothers). We give a complete description of the steady-state error for inputs that are polynomial in time. We sh…
Authors: D. Ezri, B.Z. Bobrovsky, Z. Schuss
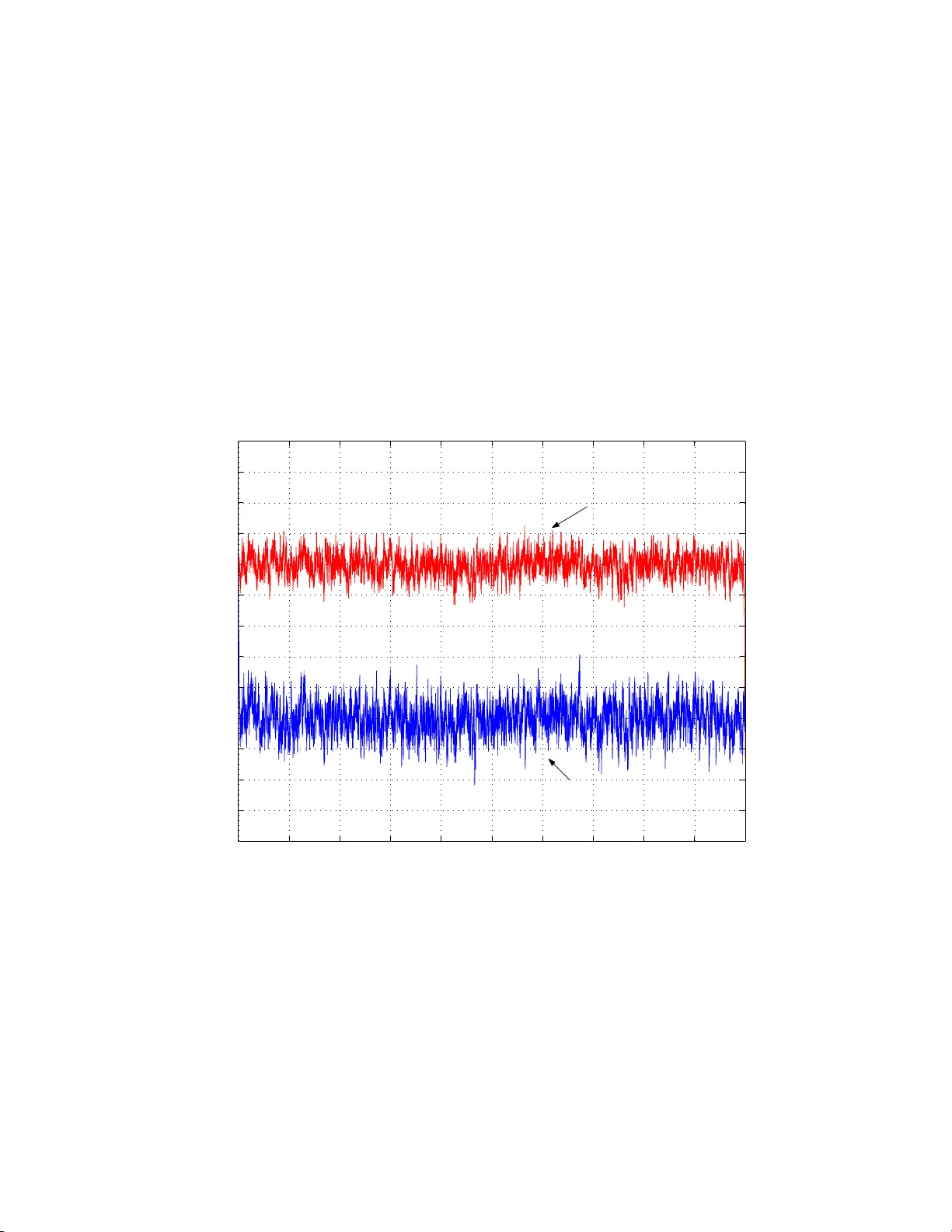
ABOUT THE TR UE TYPE OF SMOOTHERS D. Ezri ∗ B. Z. Bobrovsky † Z. Sc h uss ‡ No v emb er 20, 2021 Abstract W e emplo y th e v aria tional form ulation and the Euler-Lagrange equations to study the steady-state er r or in linear non-causal estima- tors (smo others). W e giv e a complete description of the steady-state error for inputs that are p olynomial in time. W e sho w that the steady- state err or r egime in a smo other is similar to that in a filter of dou- ble the t yp e. This means that the steady-state error in the optimal smo other is signifi can tly sm aller than th at in the K alman fi lter. The results reve al a significant adv an tage of smo othing ov er filtering w ith resp ect to robu stness to mo del u ncertain ty . Keyw or ds: Linear smo othing, steady state erro r, t yp e ∗ Department of E lectrical Enginee r ing–Systems, T el-Aviv University , Ra ma t-Aviv, T el- Aviv 69 978, Isr ael. email: ezri@ eng.tau.ac.il † Department of E lectrical Enginee r ing–Systems, T el-Aviv University , Ra ma t-Aviv, T el- Aviv 69 978, Isr ael. email: b obrov@eng.tau.ac.il ‡ Department of Mathematics, T el-Aviv Universit y , Rama t-Aviv, T el-Aviv 6997 8 , Isra e l. email: sch uss@p ost.tau.ac.il. The rese arch o f Z.S. was partially supp orted by a res e a rch grant fro m T A U. 1 1 In tro ducti on The a pp earance of steady-state errors is endemic in linear and nonlinear track ing systems and w as extensiv ely studied in control theory [5]. An imp ortant result from linear deterministic con trol theory is that the trac king prop erties of a closed-lo op con tro l system are determined b y its typ e . The t ype of the system is defined as the n umber of pure integrators in the transfer f unction of the system within the closed lo op. A type- n system can trac k a p olynomial input of the form a t ( p − 1) ( p − 1)! without an y steady-state error for p ≤ n , with constan t steady-state error for p = n + 1, and cannot trac k the input signal for p > n + 1. This result is easily obtained using the final v alue theorem [5 ] from Laplace transform theory . Another result from estimation theory is that a Kalman filter [8], designed for the n -th order mo del d n x dt n = x ( n ) = σ ˙ w y = x + ρ ˙ v , (1) where w ( t ) a nd v ( t ) are indep enden t Bro wnian motions, results in a type- n closed- lo op trac king system (as demons trated b elow). Com bining the ab ov e results and using the linearity of the Kalman filter, implies that a Kalman filt er designed for the n -th order mo del (1) track s the signal ˜ x ( n ) = σ ˙ w + a t m m ! (2) with constan t steady state error for m = 0, and cannot tra c k the input signal for m > 0. Although a steady-state error is a fundamental concept in trac king and con trol theory , the app earance of steady-state errors in non-causal estimators (smo others) has nev er b een addressed, despite the extensiv e study of linear and no nlinear smo others in t he literature [12, 13, 14, 10, 17, 3, 2, 15, 1 6, 7, 11, 1]. The purp o se of this pap er is to fill the g ap in t he theory and to give a complete description o f the steady-state 2 error regime in linear smo others. Sp ecifically , w e compute the steady-state error in the linear minim um mean square error (MMSE) smo other, designed for the mo del (1). W e show that the steady-state error in the smo o ther is similar to that in the corresp onding filter of double the ty p e. Questions o f con v ergence and stabilit y o f fixed inte rv al smo others we re considered recen tly in [6]. 2 Mathematical p reliminaries W e b egin with the general linear signal and measuremen t mo del ˙ x = A x + G ˙ w y = H x + B ˙ v , (3) where w ( t ) , v ( t ) are orthog onal ve ctors of indep enden t Bro wnian motions. The minim um mean square estimation erro r (MMSEE) or maxim um a-p osteriori (MAP) estimator ˆ x ( · ) of x ( · ) , conditioned on the measuremen t y ( · ), is the minimizer ov er all square integrable functions u of the in tegral quadratic cost functional [3, 2] Z T 0 ( y − H z ) T ( B B T ) − 1 ( y − H z ) + u T u dt, (4) sub ject to the equality constraint ˙ z = Az + Gu , (5) where [0 , T ] is the observ ation in terv al. Note that the first term in (4) represen ts the energy of the measuremen t s noise asso ciated with the test function z ( · ), while the second term represen ts that of t he driving noise asso ciated with z ( · ). Note fur t her that the integral in (4) con tains the white noises ˙ w ( t ) , ˙ v ( t ), whic h are not square in tegra ble. T o remedy this problem, w e pro ceed in the standard w ay [4] by b eginning with a model in whic h the white noises ˙ w ( t ) , ˙ v ( t ) are replaced w ith square in tegrable wide band noises, and a t t he appropria te stage of the analysis, we ta k e the white noise limit. 3 The Euler-Lagrange (EL) equations [9] fo r the minimizer ˆ x = ˆ x ( t | T ) o f the problem (4), (5) are ∂ ˆ x ( t | T ) ∂ t = A ˆ x ( t | T ) − 1 2 GG T λ ˙ λ = − 2 H T ( B B T ) − 1 H ˆ x ( t | T ) − A T λ + 2 H T ( B B T ) − 1 y ( t ) , (6) with the b o undar y conditions ˆ x (0 | T ) = x 0 , λ ( T ) = 0 . (7) Th us, the estimation problem is reduced t o a linear tw o-p oin t b oundary-v alue prob- lem, whic h is solv ed in closed fo rm b y the sw eep metho d. Specifically , first the signal is filtered causally b y the Kalman filter ˆ x ( t ), satisfying ˙ ˆ x ( t ) = A ˆ x ( t ) + P H T ( B B T ) − 1 [ y ( t ) − H ˆ x ( t )] , (8) and P ( t ) is the cov aria nce matrix, satisfying the Riccati equation ˙ P = AP + P A T + GG T − P H T ( B B T ) − 1 H P . (9) Then the smo o ther ˆ x ( t | T ) is the bac kw ard sw eep of the Ka lma n filter, ∂ ˆ x ( t | T ) ∂ t = A ˆ x ( t | T ) + GG T P − 1 [ ˆ x ( t | T ) − ˆ x ( t )] , (10) with the b o undar y condition ˆ x ( T | T ) = ˆ x ( T ) . (11) W e contin ue with the steady-state error regime in the Kalman filter designed for the n -th order mo del (1). Rewriting ( 1) in v ector matr ix notation leads to ˙ x = Ax + σ b ˙ w y = h T x + ρ ˙ v , (12) where x = [ x, x 2 , . . . , x n ] T , and A = 0 1 0 0 . . . 0 0 0 1 0 . . . 0 0 0 0 1 . . . 0 . . . 0 0 0 0 . . . 0 ; b = 0 0 . . . 0 1 ; h = 1 0 . . . 0 0 . 4 The Kalman filter estimator ˆ x ( t ) = [ ˆ x ( t ) , ˆ x 2 ( t ) , . . . , ˆ x n ( t )] T for the mo del (12) satisfies (see equation ( 8) ˙ ˆ x ( t ) = A ˆ x ( t ) + k [ y ( t ) − ˆ x ( t )] , (13) where k ( t ) = [ k 1 ( t ) , . . . , k n ( t )] T = 1 ρ 2 P ( t ) h . T he equation of the Kalman filter (13) ma y b e rewritten in the form ˙ ˆ x ( t ) = ˆ x 2 ( t ) + k 1 [ y ( t ) − ˆ x ( t )] . . . ˙ ˆ x n − 1 ( t ) = ˆ x n ( t ) + k n − 1 [ y − ˆ x ( t )] ˙ ˆ x n ( t ) = k n [ y − ˆ x ( t )] , (14) whic h form a t yp e- n closed-loo p tac king system with input y ( t ), output ˆ x ( t ) and op en-lo op tra nsfer function G ( S ) = k 1 S n − 1 + k 2 S n − 2 + . . . + k n S n . (15) Th us, the Kalman filter designed for the n -th order mo del (1) trac ks the signal ˜ x ( n ) = σ ˙ w + a t m m ! (16) with constan t steady state error for m = 0, and cannot tra c k the input signal for m > 0. The the terminology offset case m = 0 of filtering theory is k ept also for smo othing. 3 Steady-state er rors in s mo oth ers Ha ving describ ed the steady-state error phenomenon in the Kalman filters, w e con- tin ue with the ev aluation o f the steady-state errors in smo o thers. W e assume that a linear s mo other is designed for the n - t h order signal mo del (1) , for whic h the Kalman filter w as designed in the previous section. In order to examine the trac king prop erties of the smoother, w e assume that the incoming signal is augmen t ed with a ( n + m ) − th 5 order p olynomial in t ˜ x ( n ) = at m m ! + σ ˙ w y = ˜ x + ρ ˙ v . (17) F or the sak e of simplicity , w e assume hereafter that σ = ρ = √ ε and ˜ x (0) = ˆ x (0) = 0. The sm o other is a linear sys tem, so the resp onse of the smo other to the measuremen t signal y ( t ) can b e separated in to a deterministic term, dep ending on the drift at m m ! , and a sto c hastic term depending on w ( t ) , v ( t ). Because the ste ady-state error regime is determined by the deterministic term, w e consider the noiseless v ersion of (17) ˜ x ( n ) = at m m ! y = ˜ x. (18) Using v ector matrix notation, the smo other is designed for the mo del ( 12) and the equations for the smo othed estimate ˆ x ( t | T ) (10), ( 8) are ∂ ˆ x ( t | T ) ∂ t = A ˆ x ( t | T ) + P h ε y ( t ) − h T ˆ x ( t | T ) , ˆ x (0) = 0 ˙ ˆ x ( t | T )) = A ˆ x ( t | T ) + bb T P − 1 [ ˆ x ( t | T ) − ˆ x ( t )] , ˆ x ( T | T ) = ˆ x ( T ) . (19) Insp ecting (19), w e observ e that t he Kalman filter forms a feedb ac k system with a t yp e- n transfer function. Th us, the K alman filter is capable of t rac king a ( p < n )- t h order p olynomial in t w ithout a steady-state error, and a ( p = n )-th order p olynomial in t with a constant steady-state error. The backw ard equation for ˆ x ( t | T ) forms a feedbac k system trac king the output of the Kalman filter ˆ x ( t ) in rev erse time and the transfer function is again o f type- n , with track ing prop erties similar to these of ˆ x ( t ). An imp ortan t feature of this forward-bac kw ard trac king system is that the tracking errors in the backw ard and forw ard equations hav e rev erse signs. This qualitativ e observ ation may indicate that the steady-state error regime in the smo other is sup erior to that in t he causal filter. 6 With the ab ov e observ ations in mind, w e turn to the quan titativ e ana lysis of the steady-state error in the smo other. W e define the estimation error e ( t | T ) = ˆ x ( t | T ) − ˜ x ( t ) and use the express ion (18) for t he incoming signal, whic h we rewrite as ˙ ˜ x ( t ) = A ˜ x ( t ) + at m m ! b y ( t ) = h T ˜ x ( t ) , (20) where A , b and h are giv en in (12). Using the EL equations (6), the equations for the estimation error are ∂ e ( t | T ) ∂ t = Ae ( t | T ) − 1 2 bb T λ ( t ) − at m m ! , e (0 | T ) = 0 ˙ λ ( t ) = − 2 hh T e ( t | T ) − A T λ ( t ) , λ ( T ) = 0 . (21) Setting e ( t | T ) = [ e 1 , . . . , e n ] T , λ ( t ) = [ λ 1 , . . . , λ n ] T , the error equations (21) b ecome ˙ e k = e k +1 , e k (0 | T ) = 0 for all 1 ≤ k ≤ n − 1 ˙ e n = − 1 2 λ n − at m m ! , e n (0 | T ) = 0 ˙ λ 1 = − 2 e 1 , λ 1 ( T ) = 0 ˙ λ k = − λ k − 1 , λ k ( T ) = 0 for all 2 ≤ k ≤ n. (22) W e seek a steady-state solution, suc h tha t ˙ e k = 0 for all 1 ≤ k ≤ n . This implies ˙ e n = − 1 2 λ n − at m m ! = 0 , (23) hence λ n = − 2 at m m ! . Using (22), we ha ve for all 0 ≤ k ≤ n − 1 ˙ λ n − k = ( − 1) k +1 2 a t m − k − 1 ( m − k − 1)! for all k ≤ m − 1 0 for all k > m − 1 . (24) 7 Using the fact that ˙ λ 1 = − 2 e 1 , w e obtain the steady-state solution for e 1 , whene v er it exists, a s e 1 = 0 for all m < n ( − 1) n a for all m = n no steady-state solution for all m > n. (25) This result implies that a smo o ther designed for a n -t h o rder mo del is capable of trac king p olynomial inputs o f o rder up to 2 n − 1, t ha t is, for m = n − 1, without an y steady-state error. Moreo v er, for a 2 n -th or der p o lynomial input ( i.e., m = n ) a constan t steady-state error of magnitude | a | app ears. W e conclude that the steady- state regime in a smo other designed for a n -th order mo del is similar to a causal filter designed for a 2 n -th order mo del, as illustrated in F igures 1, 2. The linearit y of the smo other implies that the smo ot hing error v ariance induced b y the Bro wnian motions w ( t ) , v ( t ) is not affected b y the drift term at m m ! in t he signal mo del (17). Th us, the smo other exhibits sup erior steady-state error regime without an y increase in the error v ariance, whic h remains smaller t ha n that in the causal filter [7], as show n in Figure 3. The obtained steady-state error regime corresp onds to an infinite in terv al 0 < t < ∞ . Obv iously , at the end of the in terv al [0 , T ] the smo othing solution ˆ x ( T | T ) is equal to the filtering solution ˆ x ( T ) (19). Th us, in the offset case ( m = 0) the filter dev elops a constan t steady-state error and the lag needed to eliminate the steady-state error b y smo othing is the time constan t of the system. In contrast, when m > 0 and the causal filter error increases with time, the lag necessary to decrease the error to the v alues we obtained is m uc h longer. 4 Discuss ion and conclusions The results rev eal a significant robustness of the smo other to signals different than those, for whic h the smo other is optimal. In man y applications in engineering prac- 8 0 10 20 30 40 50 60 70 80 90 100 −1.2 −1 −0.8 −0.6 −0.4 −0.2 0 0.2 t e(t) Smoother Filter Figure 1: The steady-state error in the first order smo other a nd filter with offset ( n = 1 , m = 0). No steady-state error dev elops in the smo o ther, while, the filter dev elops constan t steady-state error. 9 0 5 10 15 20 25 −2 −1.5 −1 −0.5 0 0.5 t e(t) Filter Smoother Figure 2: The steady-state error of the first order smo other and filter with the p olynomial input at 2 2 ( n = 1 , m = 1). The smo other dev elops constan t steady-state error, while, the error in the filter is unbounded. 10 0 100 200 300 400 500 600 700 800 900 1000 −0.9 −0.8 −0.7 −0.6 −0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 t e(t) Filter Smoother Figure 3: The estimation error in the first o rder smo o t her a nd filter in the offset case. No steady-state erro r dev elops in the smo ot her and the error v ariance in the smoot her remains smaller. 11 tice, either there is no exact infor ma t ion a b out the signal, or the signal c hanges it s c haracteristics with time. Th us, robustness of the system to the signal mo del is desir- able. The results further indicate that t he p erformance gap b et wee n smo o thers and filters with resp ect to the criterion of mean square error increases as the difference b et wee n the incoming signal and the nominal signal increases. The fact that a smo other, o pt imal for a n -t h o rder signal, exhibits a steady-state error regime of a t yp e 2 n causal filter, without degradatio n in t he error v ariance, is v ery app ealing from the engineering p oin t of view. This is due to the facts that in man y applications lag estimation is possible and that linear smo others are rather easy to implemen t, fo r example, b y using approximate finite impulse response (FIR) non- causal filters. Utilizing smo o thers to exploit t heir sup erior trac king prop erties may free t he designer fro m the traditional trade-off that exists in causal filtering b et w een steady-state error r egime and error v ariance. Steady-state errors also app ear in nonlinear estimators, as show n in nonlinear filtering [18, 1 9]. An extension of the ideas demons trated here to nonlinear smoo t hing will b e given in a fo r thcoming pa p er. References [1] Anderson, B.D.O. Fixed in terv al smo othing for nonlinear contin uous time systems. J. I nfo. Contr ol , 20:294–30 0, 197 2. [2] Bellman, R., Kalba, R., and Middelton, D. D ynamic progr a mming, sequen tial estimation and sequen tial detection pro cesses. Pr o c. Nat. A c ad. Sci.U.S.A. , 47:3383 4 1, 196 1. [3] Bryson, A.B., and Ho, Y.C. Applie d Optimal Contr ol . John Wiley , New Y ork, 197 5. 12 [4] Deusc hel J.D., and Stro o c k, D.W. L ar ge Devi a tions . Academic Press, 1989. [5] Dorf, R .C., and Bishop, R.H. Mo dern Co n tr ol Systems , volume I. Ad- dison W esley , 1992. [6] Einic ke , G.A. Asymptotic optimality of the minim um-v ariance fixed- in terv al smo other. I EEE T r ansactions on Sig n al Pr o c essing , 55 (4 ), pp.1543–1547 (20 0 7). [7] Kailath, T., and F rost, P . An innov ation approach to least-squares estimation part I I: Linear smo o thing in addativ e white noise. IEEE T r ans. Auto. Con tr onl , AC-13:655–660, 1968. [8] Kalman, R.E., and Bucy , R.S. New r esults in linear filtering and predic- tion theory . T r ans. AMSE, Ser. D., J. Basic Engng , 83:9 5–108, 1961. [9] Kirk D.E. Op tima l Contr ol The ory - an Intr o duction . Prentic e-Hall, Inc., 197 0. [10] Lee, R.C.K. Optima l Estimation Idetific ation and Contr ol . M.I.T. Press, 1964. [11] Leondes, C.T., P eller, J.B., and Stear, E.B. Nonlinear smo othing theory. IEEE T r an s. S ys. Sc i . Cyb. , SSC-6:63–71, 1970. [12] Rauc h, H.E. Linear estimation of sampled sto c hastic pro cesses with random par a meters. T ec hnical Rep ort 2108 , Stanfor d Electronics Labra- tory , Stanfo rd Univ ersit y , California, 196 2. [13] Rauc h, H.E. Solutions to the linear smo ot hing pro blem. I EEE T ans. A uto. Contr ol. , A C-8:371–372 , 1963 . 13 [14] Rauc h, H.E., T ung, F ., and Steib el, C.T. Maxim um lik eliho o d estimates of linear dynamic systems . AIAA J. , 3:144 5–1450, 1965. [15] Sage, A.P . Maxim um a p o steriori filtering and smo ot hing a lg orithms. Int. J. Contr ol , 11:17 1–183, 1970. [16] Sage, A.P ., and Ewing, W.S. On filtering a nd smo othing a lgorithms for nonlinear state estimation. Int. J. Contr ol , 11:1 – 18, 1970. [17] W ea v er, C.S. Estimating the output of a linear discrete system with Gaussian input. IEEE T r ans. Aut o. Contr ol , A C-8:372–374, 1963 . [18] W elti, A.L., a nd Bobr ovsky , B.Z. Mean time to lose lo c k for a coheren t second-order PN- co de track ing lo op-the singular p erturbation approa c h. IEEE J. on Sele cte d Ar e as in Comm. , 8:8 09–18, 1990. [19] W elti, A.L., Bernhard, U.P ., and Bobro vsky , B.Z. Third-order dela y- lo c k ed lo op: Me an time to lose lo c k and optimal parameters. IEEE T r ans. on Comm. , 4 3 :2540–50, 1995. 14
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment